КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рабочее проектирование МПСУ
|
|
|
|
Регулирующие клапаны. Различают клапаны прямого и обратного действия. У клапана прямого действия затвор при движении вниз уменьшает проходное сечение, а клапана обратного действия - увеличивает.
Модуль аналогового вывода ADAM-4021. Модуль аналогового вывода ADAM-4021 принимает по линии интерфейса RS-485 цифровые данные от системного компьютера или ADAM-4500 и с помощью ЦАП и микропроцессора преобразует цифровые данные в аналоговый сигнал.
Техническое проектирование МПСУ
На стадии технического проекта АСУ ТП нижнего уровня (МПСУ) необходимо:
- составить структуру системы автоматики и определить параметры ее составляющих;
- выбрать датчики контроля и управления, исполнительные органы;
- выбрать устройства согласования объекта управления с пультом диспетчера (УСО, интерфейсы) и конфигурирование контроллеров (модулей) объединить их в систему;
- описать алгоритм работы выбранной МПСУ.
Составление структуры системы автоматического регулирования. Структурная схема системы регулирования, допустим уровня в нижней части вышерассмотренного абсорбера, имеет вид.
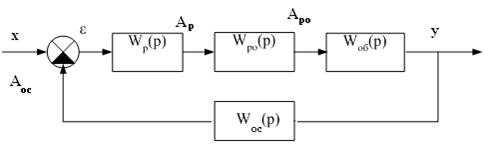
В схеме принято:
x – значение уровня стабилизации Н = 0,5 м (Уставка);
y – значение уровня в нижней части абсорбера Н = 0,5±0,01 м;
ε – допустимое отклонение значений регулируемой величины от задания, равное ±0,01 м;
Ар, Аро, Аос – выходной управляющий сигнал соответственно регулятора, регулирующего органа и цепи обратной связи;
Wp(p) – передаточная функция регулятора, примененного в системе (П, ПИ, ПИД-регулятор);
Wpо(p) – передаточная функция регулирующего органа, включающая в себя масштабирующее устройство и клапан (принята равной 1);
Wоб(p) – передаточная функция объекта управления;
|
|
|
Wос(p) – передаточная функция цепи обратной связи, включающей в себя датчик уровня и масштабирующее устройство (принята равной 1).
В результате исследования статических и динамических характеристик ТОУ определяются t (время запаздывания) и параметры передаточной функции объекта регулирования. Допустим, что передаточная функция ТОУ аналогична инерционному звену, тогда
 ,
,
где Т0 – постоянная времени объекта; К0 – статический коэффициент передачи объекта. В рассматриваемом случае принимаем Т0=3,75 с, К0=0,5. Для дальнейших расчетов t принимаем равным 0,5 с.
Исходя из значений времени задержки  , статического коэффициента передачи К0 и постоянной времени Т0 объекта, выбираем регулятор системы автоматики и значение его параметров.
, статического коэффициента передачи К0 и постоянной времени Т0 объекта, выбираем регулятор системы автоматики и значение его параметров.
Выбор регуляторов по роду действия следует проводить на основании предположений о свойствах данного объекта, указанных в таблице, и с учетом ниже рассмотренных рекомендаций.
| Наименование регулятора по роду действия | Критерий |
| Импульсный | 
|
| Релейный (двухпозиционный) | 
|
| Непрерывный (П, ПИ, ПИД-регуляторы) | 
|
1. Импульсные регуляторы могут применяться в объектах без большого запаздывания, обладающих средней емкостью при постоянной или плавно и мало меняющейся нагрузке.
2. Двухпозиционные регуляторы могут применяться в объектах без большого запаздывания, обладающих большой емкостью при постоянной или очень мало меняющейся нагрузке.
3. П -регуляторы применяются в объектах со средней емкостью, с небольшим запаздыванием и при небольших изменениях нагрузки. Пропорциональные регуляторы большей частью находят применение для одноемкостных и реже двухъемкостных объектов. Для многоемкостных объектов пропорциональные регуляторы применяются ограниченно. П -регуляторы могут обеспечить устойчивое регулирование объекта при условии соблюдения следующей зависимости 
|
|
|
где  - статическая ошибка системы, Кр – статический коэффициент передачи регулятора.
- статическая ошибка системы, Кр – статический коэффициент передачи регулятора.
4. ПИ -регуляторы применяются в объектах с любой емкостью, с большим запаздыванием и большими, но медленными изменениями нагрузки. Эти регуляторы могут применяться для объектов со значительным запаздыванием (при  ).
).
5. ПИД -регуляторы применяются в объектах с любой емкостью, с очень большим запаздыванием и при больших и резких изменениях нагрузки.
На практике значение настроечных параметров автоматических регуляторов (Кр, постоянные времени интегрирования ТИ и дифференцирования ТП) выбирается исходя из данных ниже рассмотренной таблицы.
| Тип регулятора | Тип переходного процесса | |
| апериодический с минимальным временем регулирования | колебательный с 20-процентным перерегулированием | |
| П | 
| 
|
| ПИ | 

| 

|
| ПИД | 

| 
|
Анализируя критерии по выбору регуляторов, приходим к выводу, что для стабилизации уровня в нижней части абсорбера подходят ПИ-регулятор и апериодический тип переходного процесса с минимальным временем регулирования.
В соответствии с выше рассмотренными табличными данными у выбранного ПИ-регулятора:

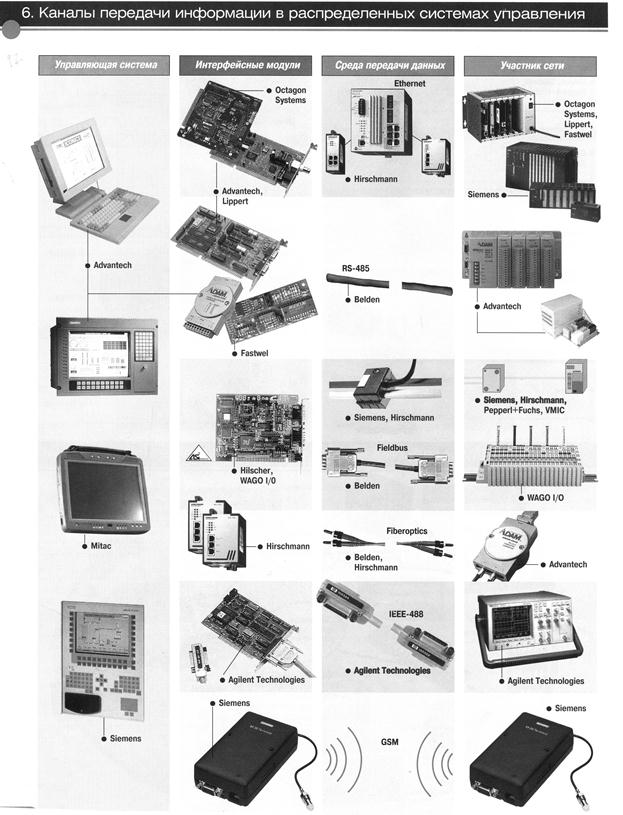
Выбор аппаратных средств МПСУ. 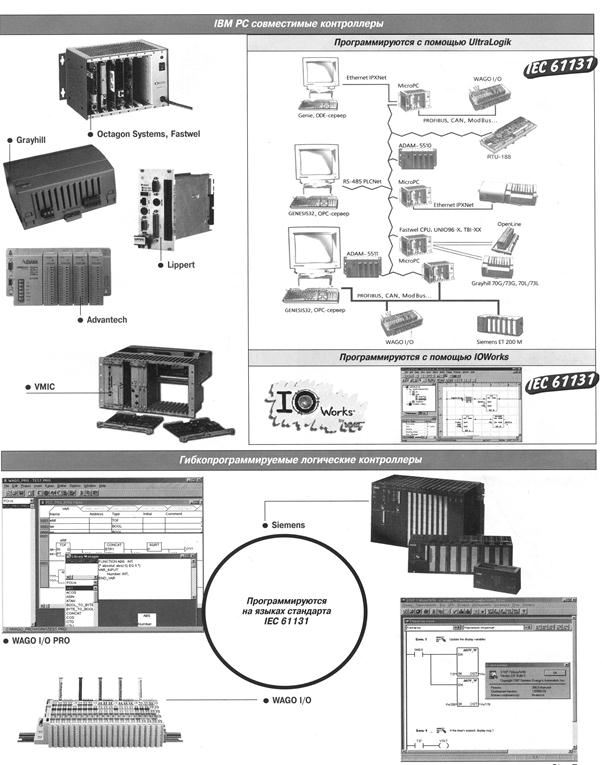 На рис.7 рассмотрены наиболее известные технические средства автоматизации.
На рис.7 рассмотрены наиболее известные технические средства автоматизации.
а)
а)
 |
б)

в)
г)
Рис. 7
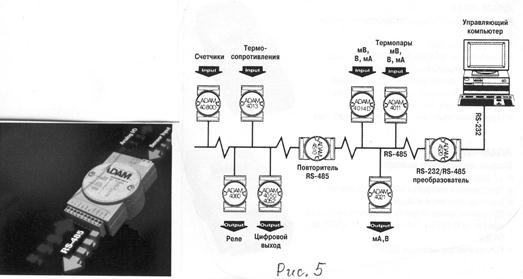
Выбор контроллера и устройств согласования с объектом в локальных системах сбора данных и управления. Рассмотрим построение локальной системы на базе контроллеров (модулей) серии ADAM-4000.
Модули серии ADAM-4000 предназначены для построения локальных систем сбора данных и управления (рис.8). Они представляют собой компактные и интеллектуальные устройства обработки сигналов датчиков и формирования сигналов управления исполнительными органами, специально разработанные для применения в промышленности. Наличие встроенных микропроцессоров позволяет им осуществлять нормализацию сигналов, операции аналогового и дискретного ввода/вывода, отображение данных и их передачу (или прием) по интерфейсу RS-485. Все модули имеют гальваническую развязку по цепям питания и интерфейса RS-485, программную установку параметров, командный протокол ASCII и сторожевой таймер.
|
|
|
|
В состав модулей контроллеров аналогового и дискретного ввода-вывода обязательно входят:
- процессор с ПЗУ, в котором хранятся программы настройки на тип датчиков, аварийных событий и единиц измерения;
- низкочастотный фильтр для устранения высокочастотных производственных помех;
- гальваническая развязка микропроцессора со средствами ввода-вывода;
- нормирующее устройство;
- связной адаптер по RS-485.
Наибольшее применение нашли модули:
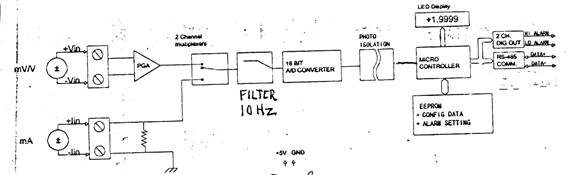
Модуль аналогового ввода ADAM-4011. Поступающая информация в виде низких значений напряжения или тока, в частности от термопар, проходит через программируемый усилитель (PGA), коэффициент усиления которого может изменяться от 1 до 128. PGA выполняет автоматическую настройку сигнала, размещая его в диапазоне от -2,5 до +2,5В. Цифровой 10-герцовый фильтр обеспечивает на выходе модуля устойчивое значение сигнала в условиях помех. В модуле предусмотрена оптическая развязка, предотвращающая разрушение сети от выбросов по напряжению со стороны датчиков. Микропроцессор выполняет пять основных функций:
- линеаризацию сигнала от термопар (т/с);
- калибровку сигнала;
- контроль состояния тревог;
- преобразование данных в заданные единицы измерения и формат интерфейса RS-485.
Схема модуля ADAM-4011 показана на рис.10 и имеет в своём составе:
Рис.10
- 16-разрядный АЦП;
- программную настройку для работы с термопарами, малыми напряжениями и токами;
- гальваническую изоляцию до 500В;
- 2 дискретных выхода аварии по верхней и нижней границам измеряемого входа.
Модуль аналогового ввода ADAM-4014D. Модуль ADAM-4014D служит для преобразования достаточно большого сигнала в виде напряжения или тока, поступающего с датчика в цифровой формат, используя для этого АЦП и микропроцессор. ADAM-4014D (рис.11) имеет в своём составе светодиодный индикатор для мониторинга рабочего процесса непосредственно на объекте, 1 аналоговый вход (максимальное напряжение +/- 10В), 2 дискретных выхода или 2 выхода-защелки сигнала аварийного дискретного управления по верхней и нижней границам входного сигнала, 1 дискретный светодиодный дисплей. За исключением линеаризации сигнала от термопар модуль выполняет те же функции и у него тот же состав, что и ADAM-4011.
|
|
|
|
С помощью встроенного АЦП обеспечивается контроль выходного сигнала. Модуль позволяет формировать выход в виде токов или напряжений с конкретной скоростью нарастания уровня сигнала.
От системного компьютера модуль принимает данные в следующих формах:
- технических единицах (0С, м, м3/ч и т.д.);
- процентах шкалы рабочего диапазона.
При этом обеспечивается выход в виде напряжения от 0 до 10 В или тока от 0 до 20 мА. Схема модуля показана на рис.12 и имеет в своём составе:
- 12-разрядный ЦАП;
- программную настройку выхода на В или мА;
- устройство контроля состояния выхода;
- гальваническую изоляцию до 500В.
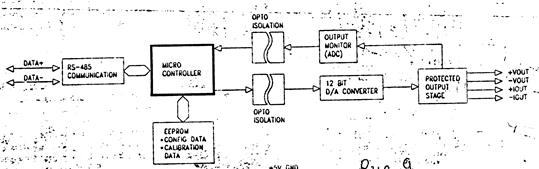
Рис.12
Модуль дискретного ввода/вывода ADAM-4050. Модуль дискретного ввода/вывода ADAM-4050 включает 7 каналов цифрового входа и 8 каналов цифрового выхода. Команды, поступающие от системного компьютера, устанавливают каналы в логические уровни. Объединение с твердотельным реле позволяет модулю осуществлять управление или мониторинг интерфейсов линий высокого напряжения или переменного тока. Схема модуля показана на рис.13 и имеет в своём составе:
- 7 дискретных входов;
- 8 выходов типа «открытый коллектор».
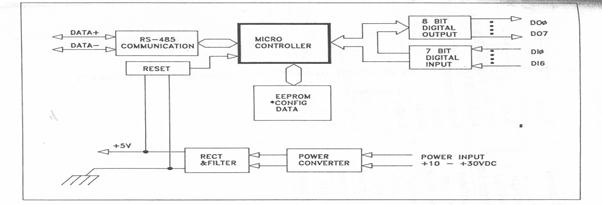
Рис.13
Модуль преобразователь RS-232 в RS-485 ADAM-4520. Модуль предназначен для преобразования интерфейсов RS-232 в RS-485 и наоборот. Его характеристики:
- скорость передачи до 38,4 кбит/с;
- автоматический контроль направления передачи;
- гальваническая изоляция до 500В;
- длина сегмента линии до 1200 м.
Пример применения контроллеров серии ADAM-4000 в автоматизированной системе научных исследований «Тритий». Основой системы является экспериментальная установка, представляющая собой две вакуумные камеры К1 и К2, разделенные мембраной (4) из исследуемого конструкционного материала (рис.14).
Камера К1 служит для напуска в нее трития. Она снабжена датчиками измерения давления и вакуума (ВМБ, РВТ, PD-11). В камеру герметично введены два токовода для подачи напряжения, обеспечивающего питание тлеющего разряда.
Камера К2 предназначена для регистрации проникающего через образец потока трития. Она снабжена датчиками измерения вакуума (ВМБ, РВТ) и резонансным масс-спектрометрическим датчиком (MS).
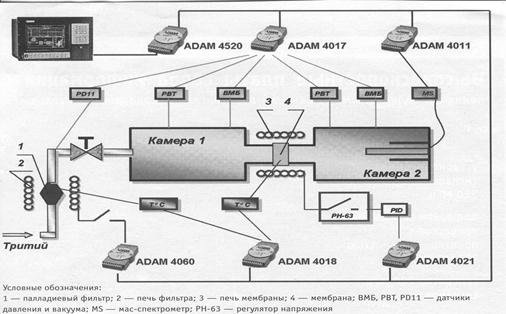
Рис.14. Структурная схема установки для исследования взаимодействия материалов с тритием
Техническая реализация. В качестве первичных измерительных преобразователей в установке применены:
- реле вакуумное теплоэлектрическое (РВТ-2М);
- термопары (ХК);
- вакуумметр магнитный электроразрядный (ВМБ-1);
- омегатронный измеритель парциальных давлений (MS);
- измеритель давлений - баратрон (PD-11).
Все перечисленные приборы имеют унифицированный выходной электрический сигнал напряжения постоянного тока 0-10 В и 0-20 мВ.
Для обеспечения заданных температурных режимов работы основных узлов установки использован регулятор напряжения РН1-63-УХЛ4.
Узел автоматизации установки разработан на базе промышленных модулей серии ADAM-4000 фирмы Advantech.
ADAM-4018 — восьмиканальный модуль ввода аналоговых сигналов предназначен для регистрации сигналов с термопар.
ADAM-4017 — восьмиканальный модуль ввода аналоговых сигналов (0-10 В) предназначен для регистрации сигналов с датчиков давления.
ADAM-4021 — модуль вывода аналоговых сигналов предназначен для управления работой регулятора напряжения при нагреве мембраны и поддержания ее температуры в заданном диапазоне.
ADAM-4060 — модуль с релейным выходом предназначен для управления работой печи нагрева палладиевого фильтра системы очистки трития.
ADAM-4011 — модуль ввода аналогового сигнала (0-20 мВ) предназначен для регистрации потока диффундирующего через мембрану трития камеры К2.
ADAM-4520 — модуль связи с управляющей машиной (конвертор RS-232/ RS-485).
Выбор аппаратных средств распределенных систем сбора данных и управления. Аппаратные средства распределенных систем рассмотрим на базе ADAM-5000.
Устройства серии ADAM-5000, предназначенные для построения территориально-распределенных систем сбора данных и управления (рис. 15), обеспечивают выполнение следующих функций:
- аналоговый ввод-вывод;
- дискретный ввод-вывод;
- первичное преобразование информации;
- прием команд от удалённой вычислительной системы и передача в её адрес преобразованных данных с использованием интерфейса RS-485.
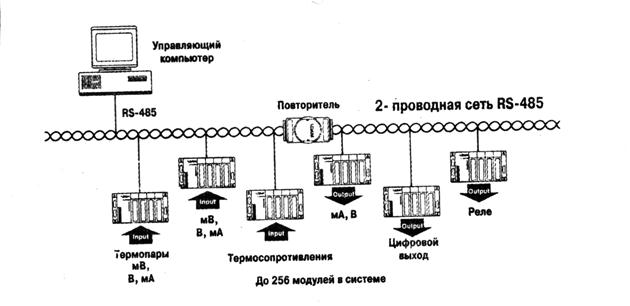
Рис.15
Распределенный ввод-вывод. ADAM-5000 состоит из трех модульных компонентов: процессора, кросс-платы, модулей ввода-вывода. Каждое устройство может содержать до 4 или до 8 модулей. Имеется возможность гибкого конфигурирования системы и входящих в её состав устройств в зависимости от количества и вида контролируемых параметров, а также от расположения контролируемых объектов. Устройства серии ADAM-5000 могут объединяться в многоточечную сеть на базе интерфейса Ethernet или RS-485, управляемую центральным компьютером. Внутренний состав модулей аналогичен, ранее рассмотренным модулям серий ADAM-4000.
К особенностям контроллера можно отнести следующее.
1. Подключение до 256 систем к одному порту.
2. Подключение до 64 каналов цифрового ввода-вывода или 32 аналоговых канала на ADAM-5000.
2. Удаленная настройка диапазонов и типов входных аналоговых сигналов.
3. Гальваноразвязка по входу/выходу/питанию и контроль с помощью сторожевого таймера.
4. Двухпроводные мультиабонентские сети на базе интерфейса RS-485.
5. Протокол обмена на базе ASCII-кодов.
6. Скорость передачи данных до 115 кбод.
Процессорный модуль. Процессорный модуль выполнен на ADAM-5510 – IBM PC совместимом программируемом микроконтроллере.
Программируемый микроконтроллер ADAM-5510 предназначен для использования в локальных и распределенных системах автоматизации в качестве автономного контроллера. Он обеспечивает прием и выдачу аналоговых и дискретных сигналов, первичное преобразования сигналов по запрограммированным пользователем алгоритмам и обмен информацией по последовательным каналам связи на базе интерфейса RS-485. Контроллер имеет открытую архитектуру и может программироваться как с помощью традиционных языков программирования (С, ассемблер), так и с помощью языков логического программирования в соответствии со стандартом МЭК-61131 (в настоящий момент поддержка ADAM-5510 реализована в системах программирования UltraLogik и Paradym-31). Таким образом, ADAM-5510 удачно сочетает в себе качества программируемого логического контроллера (PLC) с простой и открытой архитектурой IBM PC совместимых компьютеров (рис. 16). Он включает в себя:
- процессор: 80188, 16-разрядный, 40 МГц;
- память ОЗУ на 256 Кбайт;
- флэш-ПЗУ на 256 кбайт (170 кбайт доступно);
- операционную систему: ROM-DOS;
- часы реального времени (встроенные);
- сторожевой таймер (встроенный);
- четыре обслуживаемых модуля ввода-вывода;
- два последовательных порта СОМ1 RS-232 и СОМ2 RS-485.
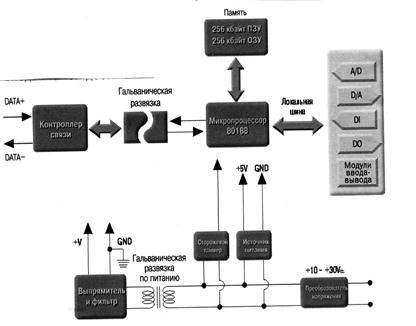
Рис. 16. Структурная схема контроллера на базе ADAM-5510
Модули ввода/вывода. Наибольшее применение нашли модули.
Модуль аналогового ввода ADAM-5017. Модуль ADAM -5017 представляет собой 8-канальное устройство
ввода с дифференциальными входами на 16-разрядные АЦП. Модуль измеряет напряжение милливольтового (± 150 мВ, ±500 мВ) и вольтового (±1В, ±5В, ±10В) диапазонов, а также силу тока до ±20 мА. Схема модуля аналогична схеме ADAM-4014 D (рис. 11), за исключением цифрового отображения снимаемого сигнала.
Модуль ввода сигналов термопар ADAM-5018. Модуль ADAM-5018 представляет 7-канальное устройство аналогового ввода сигналов на 16-разрядное АЦП. Модуль обеспечивает измерение милливольтового (±50 мВ, ±100 мВ, ±500 мВ) и вольтового (±1В, ±2,5В) диапазонов, силы тока до ±20 мА, а также температуры с помощью термопар U, K, T, E, R, S, B. В модуле предусмотрен внешний датчик компенсатор температуры холодного спая. Схема модуля аналогична схеме модуля ADAM-4011 (рис. 10).
Модуль аналогового вывода ADAM-5024. Модуль ADAM-5024 представляет собой 4-канальное устройство аналогового вывода. Используя программное обеспечение, можно задать скорость нарастания выходного сигнала, его начальное значение, тип (ток или напряжение). Схема модуля аналогична схеме модуля ADAМ-4021 (рис. 12.)
Модуль дискретного ввода-вывода ADAM-5050. ADAM-5050 аналог ADAM-4050 (рис. 13) представляет собой 16-канальный модуль дискретного ввода-вывода. Выходные каскады каналов выполнены в виде транзисторных ключей с открытым коллектором. Каналы применяются для управления твердотельными реле и исполнительными механизмами дискетного типа, а также для контроля состояния концевых выключателей или датчиков приближения и других дискретных сигналов.
Вместо ADAM-5050 можно использовать два отдельных модуля 16- канальный модуль дискретного ввода ADAM- 5051 и 16-канальный модуль дискретного вывода ADAM-5056.
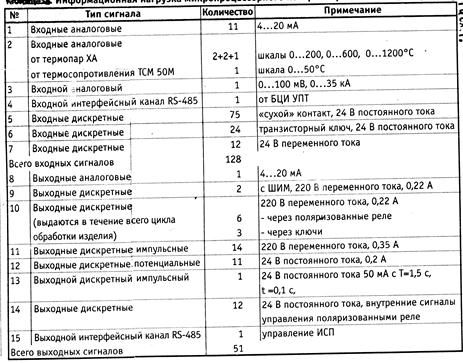
Примерная допустимая информационная нагрузка микропроцессорного контроллера системы показана в табл. 2.
Таблица 2.
Выбор датчиков и исполнительных органов системы контроля и управления. Датчик преобразует контролируемую или управляемую величину в выходной сигнал, (напряжение или ток) для передачи по каналам связи. Датчики для дистанционных передач классифицируют по двум признакам:
- по виду контролируемой величины (P, F, L, T и т.д.);
- по виду и характеру выходного сигнала (токовый, напряжений, двоичного кода).
Например, для разработки системы автоматизации ранее рассмотренного процесса осушки необходимо подобрать следующие датчики системы контроля и управления.
Приборы контроля расхода. Для измерения расхода жидкостей, газов, пара по методу переменного перепада давления с использованием стандартных сужающих устройств выбрана диафрагмы типа ДКС.
Диафрагма используется в комплекте с преобразователем разности давления (датчиком разности давления).
В качестве преобразователя разности давления выбран унифицированный преобразователь Сапфир - 22 – ДД, имеющий следующие параметры:
- исполнение – Ех (взрывозащищенное);
- климатическое исполнение Т3 (от минус 10 до плюс 55 °С);
- погрешность в % – 0,5;
- верхний предел измерений, МПа – 16,0.
Данный прибор предназначен для работы в системах контроля, регулирования и управления технологическими процессами путем непрерывного преобразования разности давления среды в стандартный токовый выходной сигнал с передачей его на вторичную аппаратуру или исполнительные механизмы. Преобразователь состоит из двух функциональных устройств первичного преобразователя, включающего в себя измерительный блок и встроенное электронное устройство, и блока преобразования сигналов БПС - 24.
Приборы контроля уровня. В качестве приборов для измерения уровня жидкости в абсорбере выбран преобразователь измерительный уровня буйковый Сапфир – 22 ДУ, со следующими параметрами:
- исполнение – Ех (взрывозащищенное);
- климатическое исполнение У2 (от -30 до +50°С);
- погрешность в % – ± 0,5;
- верхний предел измерений, мм – 6000;
- предельно допускаемое рабочее избыточное давление, МПа–16,0;
- температура контролируемой жидкости - от -50 до +120°С, при использовании теплоотводящего патрубка температура может быть от -50 до +200°С.
Преобразователь предназначен для работы в системах автоматического контроля, регулирования и управления технологическими процессами в том числе со взрывоопасными условиями производства и обеспечивает непрерывное преобразование значения измеряемого параметра - уровня жидкости или уровня границы раздела жидких фаз как нейтральных, так и агрессивных сред в стандартный токовый выходной сигнал дистанционной передачи. Преобразователь состоит из измерительного блока и электронного преобразователя. При изменении измеряемого уровня происходит изменение гидростатической выталкивающей силы, воздействующей на чувствительный элемент-буек. Это изменение через рычаг передается на тензопреобразователь, размещенный в измерительном блоке, где линейно преобразуется в изменение электрического сопротивления тензорезисторов. Электронный преобразователь преобразует это изменение сопротивления в токовый выходной сигнал. Для контроля уровня выбран преобразователь измерительный Сапфир.
Приборы контроля температуры. Для измерения температуры выбраны взрывозащищенные термоэлектрические преобразователи ТХК 1087. Термоэлектрические преобразователи ТХК 1087 предназначены для измерения температуры газообразных и жидких сред. Его технические характеристики:
- рабочий диапазон температур, °С - -40...+600;
- чувствительный элемент - термоэлектродная проволока;
- условное давление рабочей среды, МПа – 16,0.
Приборы контроля давления. Для измерения давления в системе выбран измерительный преобразователь давления PC-28. Преобразователь давления PC-28 предназначен для измерения разрежения, а также избыточного и абсолютного давления газа, пара и жидкости. Его технические характеристики:
- диапазон измерений - 0 ÷ 20 МПа.;
- выходной сигнал - 4 ÷ 20 мА (двухпроводная линия).
Привод клапанов прямого и обратного действия может быть совершенно одинаковым. В большинстве случаев корпусы клапанов выполняются такой конструкции, при которой возможно поворотом затвора на 180 градусов и удлинением штока перевести клапан с прямого действия на обратное. Помимо привода в его состав входит позиционер, который фиксирует положение клапана в соответствии с управляющим сигналом. В пневматических приводах роль позиционера выполняет обратная пружина. В некоторых клапанах изменение действия привода достигается с помощью подвода воздуха от регулятора под мембрану привода. Пневматические клапаны с мембранным приводом прямого действия называются также нормально открытыми (НО) или «воздух закрывает» (ВЗ), а обратного действия - нормально закрытыми (НЗ) или «воздух открывает» (ВО). Первые при отсутствии давления воздуха над мембраной находятся в открытом состоянии, а вторые - в закрытом.
Примечание. Выбирать клапан необходимо в соответствии с характером его действия и особенностями технологического процесса, для регулирования которого он предназначается. При прекращении подачи воздуха к приводу регулирующего клапана последний под действием пружины должен перевести затвор в положение, исключающее возможность создания в объекте регулирования аварийного или нежелательного состояния.
В контурах регулирования разрабатываемой системы примем следующие клапаны.
1. В подаче сырого газа и отводе осушенного - клапан НЗ регулирующий 25с50нж, Dу50, Ру64 двухседельный фланцевый с мембранным исполнительным механизмом для жидких и газообразных сред при температуре до 220 ºС.
2. В подаче и отводе хладоносителя - клапан НО регулирующий 25с48нж Dу25, Ру64 фланцевый с мембранным исполнительным механизмом для жидких и газообразных сред при температуре до 220 ºС. ДУ- условный диаметр в мм (15, 25,40, 50, 80). РУ- условное давление в 0,1 МПа (16, 25, 40, 64, 100).
3. Подача РДЭГа и отвод НДЭГа - клапан НЗ регулирующий 25нж50нж, Dу100, Ру64 двухседельный фланцевый с мембранным исполнительным механизмом для сред при температуре до 220 ºС.
Интерфейс передачи данных. В качестве последовательного промышленного интерфейса передачи данных в средствах автоматизации рассмотрим протокол RS-485.
Стандарт Ассоциации электронной промышленности (EIA) RS-485 представляет собой широко используемый промышленный стандарт на двунаправленную, симметричную линию передачи. Протокол стандарта
EIA RS-485 имеет следующие характеристики:
- максимальная длина линии в пределах одного сегмента сети: 1200 метров (4000 футов);
- пропускная способность – 10 Мбод и выше;
- максимальное число узлов в сегмент-32;
- двунаправленная коммуникационная линия с функцией арбитража работающая по кабелям, состоящим из одной витой пары;
- возможность подключения параллельных узлов. Истинная многоточечная схема подключения.
Модули ADAM являются полностью изолированными и при передаче и при приёме данных работают с единственной витой парой. Поскольку соединение узлов выполняется параллельно, модули могут быть свободно отключены от головного (системного) компьютера без каких-либо последствий для функционирования остальных узлов. Применение экранированной витой пары в промышленных условиях является предпочтительным, поскольку это обеспечивает получение высокого отношения полезный сигнал/шум.
При совместной работе узлов в сети, в ней не происходит конфликтов по передаче данных, поскольку используется простая последовательность команда/возвращённое значение. В сети всегда присутствует один инициатор обмена (без адреса) и большое количество пассивных узлов (с адресом). В нашем случае в качестве арбитра выступает персональный компьютер, подключённый через свой последовательный RS-232 порт, к сетевому преобразователю RS-232/RS-485 типа ADAM. В качестве пассивных участников обмена данными выступают модули ADAM. Когда модули не передают данные, они находятся в состоянии ожидания. Головной компьютер инициирует обмен данными с одним из модулей путём реализации последовательности команда/возвращаемое значение. Команда обычно состоит из адреса модуля, с которым хочет установить связь головной компьютер. Модуль с указанным адресом выполняет команду и передает возвращаемое значение в системный компьютер.
Многоточная структура сети RS-485 работает на базе двухпроводного соединения узлов в сегменте сети. Стыкуемые модули подключатся к этим двум линиям с помощью так называемых ответвителей (drop cables). Таким образом, все подключения выполняются параллельно и любые подсоединения и отсоединения узлов никак не влияют на работу сети в целом. Поскольку модули ADAM работают со стандартом RS-485 и используют команды в формате кодов ASCII, тот они могут стыковаться и обмениваться информацией с любыми компьютерами и терминалами, воспринимающими эти коды. При организации сети на базе протокола RS-485 могут применяться схемы соединений: в цепочку, звездой, смешанная и т.д.
Структурная схема системы связи, в состав которой входят приемники и формирователи, соответствующие требованиям настоящего стандарта, приведена на рис. 17. Общая нагрузка, обусловленная наличием приемников и формирователей в пассивном (включенном, высокоимпедансном) состоянии, определяется количеством присутствующих единиц нагрузки. Единица нагрузки, в свою очередь, определяется вольтамперной характеристикой (ВАХ). Нагрузкой является формирователь (G), приемник (R) либо их параллельное соединение в пассивном состоянии, а также согласующие резисторы (Rc = 120 Ом).
Каждый случай неравномерности импеданса линии приводит к отражению и искажению передаваемого сигнала. Если неравномерность импеданса имеет место в линии передачи, это немедленно приводит к эффекту отражения сигнала, искажающему исходный сигнал. Особенно этот эффект проявляется на концах линий. Для устранения неравномерности установите на конце линии согласующее сопротивление.
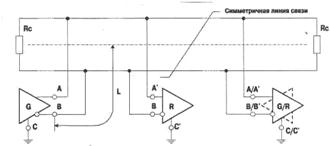
Рис. 17 Многоточечная система связи
Конфигурирование контроллеров (модулей). Объединение контроллеров (УСО) и ЭВМ в МПСУ выполняется конфигурированием средствами ADAM API или ADAM ОРС-сервер.
Конфигурирование устройств средствами ADAM API. Для обеспечения правильного функционирования модулей серии ADAM-4000 следует определить параметры конфигурации (входной диапазон(ы), базовый адрес и т.п.). Для модулей серии ADAM конфигурирование можно выполнить с помощью программы Advantech ADAM API.
Конфигурировать модули необходимо следующим образом. Запустить программу Advantech ADAM API по пути Пуск/Программы/ Advantech ADAM API/ADAM Utility VB. При этом на экране монитора появится окно Advantech ADAM Setup Utility. Выбрать меню Port Search
для вывода на экран монитора диалоговой панели поиска устройств, подключенных к порту - COM Port Search (рис. 18).
В поле Comm Port установить номер порта, к которому подключены устройства. В поле Baud Rate установить скорость передачи данных. В поле Highest Address установить диапазон адресов модулей, подлежащих сканированию (поиску). В поле Scanned Address отображается текущий сканируемый адрес. Нажать кнопку Search для активизации режима поиска подключенных модулей.
 |
Рис. 18 Рис. 19 Рис. 20
При обнаружении подключенных к системе модулей информация о них отобразится в рабочем поле окна Advantech ADAM Setup Utility (рис. 19).
Для конфигурирования необходимо поместить курсор выбора на модуль, который Вы хотите сконфигурировать и исполнить Setup/Run. На экране появится перечень доступных, для данного типа параметров конфигурации и с текущими значениями каждого из параметров. Например, на рис. 20 приведен экран конфигурирования для модуля ADAM-4014D.
Пользователем должны быть определены следующие параметры конфигурации:
- базовый адрес (1-255) – в поле Address;
- диапазон входного сигнала или коэффициент усиления в поле Range;
- формат передаваемых значений Floating point (Engineering Units) в инженерных единицах в поле Format;
- установки для аварийного дискретного управления, если требуется использовать данную функцию в поле Alarm. (установка верхнего и нижнего предела аварийного управления – поле Alarm Limits.).
Параметры опций Checksum (контрольная сумма) и Baud Rate (скорость передачи) могут быть изменены только при условии установки модуля в состояние INIT.
После выполнения всех необходимых изменений в конфигурации модуля для пересылки данных конфигурации в модуль и их активизации необходимо нажать кнопку RUN.
Подробное описание конфигурирования смотри в /7/.
Конфигурирование устройств средствами ADAM OPC-сервер. Программа ADAM OPC-сервер позволяет осуществлять обмен данными в распределенной сети между устройствами ввода-вывода серии ADAM и приложениями-клиентами OPC (SCADA-системой). Помимо этого с помощью этой программы можно проводить настройку и конфигурирование модулей серии ADAM-4000 и ADAM-5000/485.
При работе с OPC-сервером необходимо выполнить следующее.
1. Запустить программу Fastwel Adam OPS Server.
2. В появившемся окне исполнить сначала меню Добавить, а затем команду Устройство.
3. В диалоговой панели Параметры устройства (рис. 21) установить нужную серию устройств (ADAM-5000 или ADAM-4000), порт компьютера (СОМ1 или СОМ2), выполнить настройку скорости обмена (допустим 9600), адрес модуля ADAM-4000 или устройства ADAM-5510.
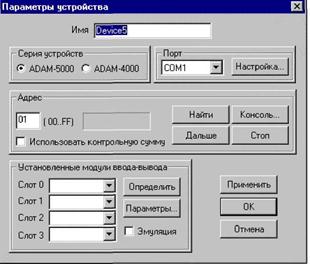
Рис. 21. Внешний вид диалоговой панели настройки параметров устройства
4. В поле Адрес исполнить кнопку Найти. При этом в окне высветится имя блока, установленного по указанному адресу.
5. В поле Установленные модули ввода-вывода или Тип модуля ввода-вывода исполнить кнопку Определить. В окне появится имя блока. Далее исполнить кнопку Параметры. В появившемся окне будет отражено устройство, параметры которого необходимо прочитать или установить (рис. 22).
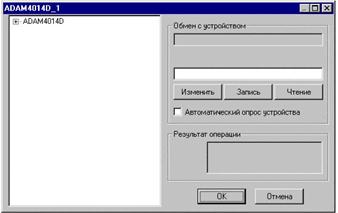 |
Рис. 22. Внешний вид диалоговой панели Свойства устройства при создании тега на основе программной модели устройства
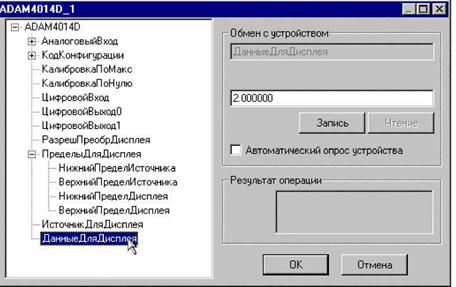 |
6.Исполнить указанное устройство в окне (рис. 23) выбрать последовательно нужный параметр, например Аналоговый вход для ADAM 4014D, а затем в появившемся списке допустим Верхний предел исполнить кнопку Читать. В поле Обмен с устройством высветится значение параметра.
Рис. 24. Выбор параметра программной модели устройства, с которым связывается создаваемый тег
 |
7.В случае необходимости для изменения параметра ввести его новое значение и исполнить кнопку Изменить и Запись. В поле Результат операции высветится отметка о записи (рис. 25). Исполнить кнопку ОК, в левой части окна вывести устройство Device1.
Рис. 25. Отображение результата операции обращения к устройству
8. Для устройства Device1 исполнить команду Создать теги автоматически, а затем командой Монитор в меню Вид запустить просмотр текущих значений на входе установленных тегов (рис. 26). Для остановки просмотра исполнить команду Монитор.
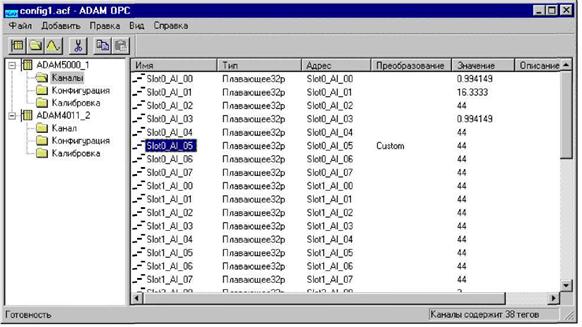
Рис. 26. Внешний вид главного окна приложения Fastwel ADAM ОРС-сервер
Описание состава и алгоритма функционирования МПСУ. Описание состава и алгоритма функционирования выбранной МПСУ проведем на примере автоматизированной системы управления паровым котлом, в части станции авторегулирования (см. пример на рис. 2).
Описание состава системы. Ввод сигналов от датчиков информационной подсистемы в рабочую станцию оператора осуществляется с помощью модулей удаленного ввода информации серии ADAM-4000 фирмы Advantech: ADAM-4017 – для ввода токовых сигналов, ADAM-4018 – для термопар и милливольтовых датчиков, ADAM-4013 – для термометров сопротивления, ADAM-4052 – для дискретных сигналов.
Количество контролируемых параметров на 1 котел составило 175 аналоговых (температура, давление и расход по пароводяному и газовоздушному трактам котла, температурный режим металла поверхностей нагрева и барабана, расход и давление топлива) и 32 дискретных (состояние основных механизмов, клапанов и задвижек). Количество установленных модулей ADAM – 30 шт. Устанавливаются они рассредоточено в непосредственной близости к существующим клеммным соединениям цепей датчиков. Ввод информации от модулей в компьютер осуществляется по интерфейсу RS-485 с помощью витой пары.
2. Для авторегулирования применены модули ADAM-4000 для «медленных» регуляторов (температуры перегрева пара, рециркуляции дымовых газов и непрерывной продувки) и скоростной 16-канальный АЦП VADI-4 для остальных («быстрых») регуляторов. Для гальванической развязки и нормализации сигналов, поступающих на вход АЦП, использованы нормализаторы сигналов типа ADAM-3012.
Выдача управляющих воздействий цифровых регуляторов на исполнительные механизмы осуществляется с помощью двух шестнадцатиканальных плат VDOUT с твердотельными реле (нагрузочная способность = 30 В/0,5 А) с питанием выходных цепей от двух спаренных источников LX-200 фирмы Computer Products (=24 В/9 А).
Описание алгоритмов обработки информации в системе. Каждый контролируемый параметр на стадии его определения (измерения или вычисления) подвергается стандартной математической обработке, которая включает:
- масштабирование измеренных сигналов;
- контроль достоверности, путем сравнения с уставками «больше/меньше», «предельная скорость», а также путем логического анализа значений взаимосвязанных между собой параметров;
- контроль нарушений регламентных границ (для каждого параметра могут быть заданы предупредительные и аварийные уставки на нижней и верхней границах).
Кроме того, в системе предусмотрена специальная математическая обработка, которая осуществляет вычисление непосредственно измеряемых параметров (или корректирует значения измеренных параметров) с помощью формул. Формулы могут включать следующие основные компоненты:
- арифметические и логические операции, элементарные функции;
- функции, реализующие номинальные статические характеристики термопар и термометров сопротивления;
- функции, оперирующие со значениями контролируемых параметров (текущее значение одного параметра, Ymin, Ymax и Ymid для группы параметров, скорость изменения параметра и т. п.).
Особый класс функций (алгоблоков) позволяет, как из кубиков, собрать необходимую систему регулирования («ПИД-регулятор», «ПИД-корректор», «дифференциатор», «демпфер» и т.д.).
Рабочее проектирование МПСУ заключается в проведении:
- разработки программ решаемой задачи автоматизации;
- комплексной отладки МПСУ.
Разработка программного обеспечения МПСУ средствами ULTRALOGIK. МПСУ, построенных на основе ADAM, можно программироваться как с помощью традиционных языков программирования, так и средствами пакета Ultralogik. Рассмотрим программирование в системе Ultralogik.
ULTRALOGIK-система предназначена для разработки программ промышленных контроллеров с помощью простых инструментальных средств, используя, в частности, в качестве языка программирования язык функциональных блоковых диаграмм.
ULTRALOGIK функционирует на IBM PC совместном компьютере, с помощью которого может производиться отладка программы на объекте и состоит из двух частей: системы программирования и системы исполнения (рис.27).
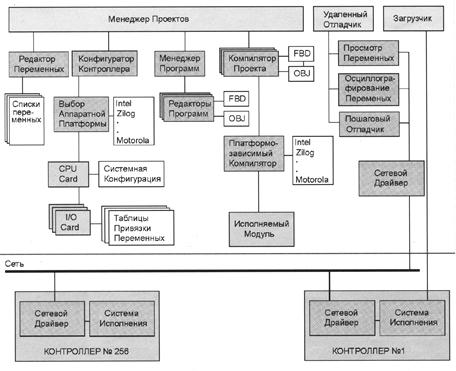
Рис. 27. Архитектура системы ULTRALOGIK
Система программирования содержит собственно средства подготовки проектов, менеджер проектов и средства их отладки.
Программа управления в ULTRALOGIKпредставляется как некоторое логическое программное устройство, описывающее технологический процесс и операции над переменными величинами (параметрами) этого процесса. Программа может содержать следующие базовые типы объектов: переменные; константы; комментарии; функциональные блоки.
Поддерживаемые типы переменных приведены в табл. 3. Типы констант соответствуют основным типам переменных.
Поддерживаемые типы переменных в системе ULTRALOGIK Таблица 3
| Тип переменной | Принимаемые значения |
| Двоичные переменные (Boolean) | TRUE - истина, FALSE- ложь |
| Переменные целого типа (Integer) | -32768...+32767 |
| Переменные с плавающей точкой (Float) | ±1.186-38... ±3.4Е+38(IEEE 754) |
| Таймерные переменные (Timer) | не более 8760h59m59s99 |
В табл. 3 h - часы, m - минуты, s - секунды, 99 - сотые доли секунды.
Наиболее используемый язык функциональных блоковых диаграмм (FBD) описывает функции между входными переменными и выходными переменными. Эти функции записываются в виде сочетания элементарных функциональных блоков. Выход функционального блока может быть соединен с другими блоками. Каждый функциональный блок представляет собой прямоугольник, внутри которого имеется обозначение функции, выполняемой блоком.
Один или несколько функциональных блоков, соединенных между собой, и образуют программу на языке FBD.
Имеются следующие формальные правила языка FBD:
- функциональные блоки должны располагаться в поле программы;
- не может быть свободных (несоединенных) входов и выходов функционального блока;
- любая связь (NET) должна иметь имя переменной;
- входы и выходы функциональных блоков, присоединенные к связям, имеющим одинаковые имена, считаются соединенными;
- очередность выполнения блоков в программе слева направо, сверху вниз.
Примеры базовых функций языка FDDТаблица 4
| Функции двоичного типа | NOT, AND, OR, XOR, SET, RESET |
| Функции управления программой | RETURN, GOTO, CALL, TSTART, TSTOP, GSTART, GSTOP |
| Арифметические функции | ADD, SUB, DIV, MUL |
| Функции сравнения | =, < >, >, <, =>, <= |
| Математические функции | ABS, EXPT, LOG, SQRT |
| Тригонометрические функции | ACOS,ASIN,ATAN,COS,SIN,TAN |
Язык FBD содержит метки, операторы условного и безусловного переходов, которые свойственны традиционным процедурным языкам программирования. Примеры 1-4 иллюстрируют реализацию некоторых простых функций с помощью языка FBD.
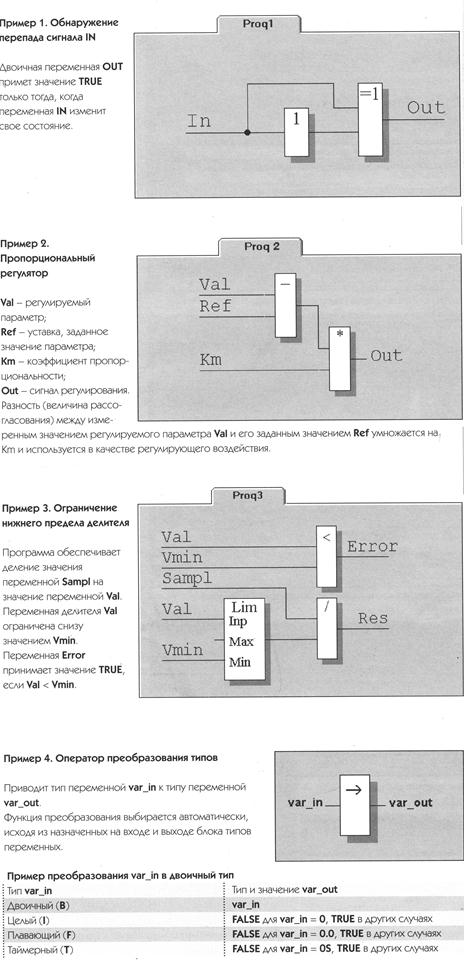
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 1814; Нарушение авторских прав?; Мы поможем в написании вашей работы!