КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Радіонавігаційне обладнання
|
|
|
|
Радіонавігаційне обладнання (РНО) призначене для визначення місця (координат) розташування ЛА щодо відомої точки на поверхні землі, для виведення ЛА на вибрану лінію маршруту і забезпечення польоту заданою траєкторією, а також для організації повітряного руху в районі аеродрому і забезпечення посадки ЛА в складних метеорологічних умовах і вночі.
РНО за завданнями і повнотою їх рішень поділяють на радіонавігаційні пристрої (РНП) і системи (РНС). Радіонавігаційні пристрої призначені для виміру одного навігаційного параметра (відстані до радіомаяка, курсового кута радіостанції та ін.). До РНП відносяться радіовисотоміри, автоматичні радіокомпаси та ін. Радіонавігаційними системами називають сукупність РНП, призначених для вирішення окремого навігаційного завдання (визначення місцезнаходження ЛА, посадки та ін.). До РНС відносяться радіосистеми ближньої (РСБН) і далекої навігації (РСДН), допплерівські вимірники швидкості і кута зносу (ДВШЗ), системи посадки (СП).
За способом отримання інформації РНО поділяється на автономне, працююче без участі наземних засобів (радіовисотоміри, ДВШЗ, РЛС огляду наземної поверхні) і неавтономне, включаючи бортове і наземне РНО (радіокомпаси, радіосистеми навігації).
Радіовисотоміри (РВ) призначені для виміру дійсної висоти польоту ЛА (відстань від ЛА до точки на земної поверхні, над якою пролітає ЛА в даний момент). По діапазону вимірюваних висот РВ поділяються на РВ малих висот (від 0 до 1500) м, наприклад РВ-УМ, і РВ великих висот (до 30000) м.
Автоматичні радіокомпаси (АРК) призначені для літаководіння по приводних і широкомовних радіостанціях і радіомаяках, а також для виконання передпосадкових маневрів. АРК забезпечує безперервний вимір курсового кута радіостанції (ККР) – кут в горизонтальній площині між поздовжньою віссю літака і напрямом на радіостанцію (радіомаяк). Сучасні АРК (АРК-11, АРК-15, АРК-22 та ін.) працюють у середньохвильовому діапазоні і вимірюють ККР на відстані до 500 км на висоті польоту 10 км.
|
|
|
Допплерівський вимірювач швидкості і кута зносу (ДВШЗ) призначений для виміру шляхової швидкості і кута зносу літака. Шляхова швидкість – це швидкість переміщення ЛА щодо земної поверхні (векторна сума швидкості ЛА щодо повітряного середовища і швидкості вітру). Кут зносу – це кут між векторами шляхової і повітряної швидкості. Робота ДВШЗ заснована на використанні ефекту Допплера (визначення різниці частот випромінюваного і відображеного від Землі радіосигналів). Сучасні ДВШЗ (ДИСС-3П, ДИСС-013) вимірюють шляхову швидкість у діапазоні від 150 до 1300 км/год і кута зносу літака в діапазоні ±30 °.
Радіотехнічні системи ближньої навігації (РСБН) є комплексними системами, що складаються з бортового і наземного обладнання і мають два основні режими роботи: «Навігація» і «Посадка». У режимі «Навігаці я» РСБН визначає місце розташування літака (похилу дальність і азимут щодо наземного радіомаяка). У режимі «Посадка» РСБН визначає кутове відхилення літака від ЗПС і працює спільно з курсоглісадними приводними радіомаяками. В теперішній час на пасажирських літаках встановлюється бортове обладнання систем РСБН-2СА, РСБН-4, РСБН-7С та ін. Похибка виміру азимута наземного радіомаяка не більш 0,25 ° і дальності до нього – не більш 200 м.
Радіотехнічні системи дальньої навігації (РСДН) призначені для визначення місця розташування ЛА на маршрутах, де засоби ближньої навігації не забезпечують потрібного обслуговування польотів. За допомогою сучасних РСДН визначають місця розташування ЛА на відстанях 1500 км і більше. Вони складаються з радіопередаваючих пристроїв – опорних станцій, стаціонарно розміщених на поверхні Землі в точках, координати яких відомі, і бортового обладнання. Бортове обладнання вимірює дальності або різницю дальностей до опорних станцій і обчислює поточні координати ЛА.
|
|
|
Системи посадки (СП). Принцип дії радіотехнічних систем посадки літаків заснований на застосуванні наземних радіомаяків, тому такі системи називають також радіомаяковими системами (РМС). РМС посадки призначені для отримання на борту ЛА і видача екіпажу і в САУ польотом інформації про кутове відхилення ЛА від заданої траєкторії (ЗТ) заходу на посадку і про дальність до розрахункової точки приземлення (або про проліт характерних ділянок ЗТ). До складу РМС входить наземне і бортове обладнання.
Наземне обладнання РМС призначене для створення зон випромінювання сигналів, інформативні параметри яких залежать від відхилення точки прийому від ЗТ як в горизонтальній, так і у вертикальній площинах, а також для випромінювання сигналів, що забезпечують визначення відстані до розрахункової точки приземлення ЛА або відзначають певні ділянки на ЗТ. До складу наземного обладнання РМС входять радіомаяки (РМ), яки називаються відповідно до виконуваних ними функцій курсовими (КРМ), глісадними (ГРМ), далекомірними і маркерними (МРМ), а також апаратура контролю, сигналізації і управління. Типи і розміщення радіомаяків залежать від функцій системи посадки, до складу якої вони входять.
Бортове обладнання РМС призначене для прийому, посилення і перетворення сигналів наземних радіомаяків і видачі на індикатори пілотів і в САУ сигналів, відповідних кутовим відхиленням ЛА від ЗТ, а також відстані до розрахункової точки приземлення або прольоту характерних ділянок ЗТ.
Типи РМС відрізняються допустимим при посадці мінімумом погоди і використовуваним діапазоном радіохвиль. Для роботи РМС, які застосовуються в цивільної авіації, виділений метровий діапазон радіохвиль. Такі РМС називають системами метрового діапазону.
Допустимий при посадці мінімум погоди визначається встановленими нормами ICAO. Відповідно до метеорологічних умов при посадці розрізняють РМС I, II і III категорій. Найбільш широке застосування знаходять РМС I і II категорій. Дорожча і складніша в експлуатації апаратура системи III категорії використовується в крупних аеропортах з високою інтенсивністю повітряного руху і підвищеною вірогідністю несприятливих метеорологічних умов.
|
|
|
РМС метрового діапазону засновані на визначенні кутового відхилення ЛА від ЗТ в горизонтальної площині φ і у вертикальній площині ө по сигналах наземних радіомаяків ГРМ і КРМ (рис. 5.21, де ПГ – площина глісади; ПК – площина курсу).
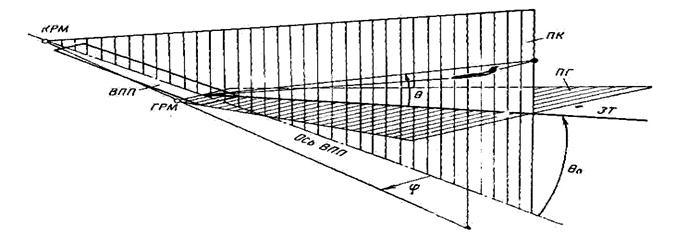
Рис. 5. 21. Кутове положення ЛА при заході на посадку по РМС метрового діапазону.
Антенні системи цих радіомаяків формують в просторі амплітудно – модульоване поле, коефіцієнти глибини модуляції якого залежать від величини кутів φ або ө (просторова амплітудна модуляція). Інформативний параметр сигналу в РМС метрового діапазону – різниця глибин модуляції напругою з частотами 90 і 150 Гц або глибина просторової модуляції напругою з частотою 60 Гц. Різниця глибин модуляції застосовується як інформативний параметр в каналі глісади всіх РМС метрового діапазону і в каналі курсу РМС, стандартизованих ICAO (міжнародні системи типу ILS). Глибина модуляції використовується як інформативний параметр сигналу тільки в каналі курсу РМС типу СП-50М і СП-68, що служить підставою для виділення цих систем в окрему групу (системи типу СП-50).
Проліт ЛА характерних ділянок на ЗТ визначається по сигналу маркерного радіомаяка, антенна система якого формує направлену вгору діаграму. Інформативний параметр сигналу в маркерному каналі є амплітудою сигналу, а також кодом маніпуляції і частотою його модуляції (використовувані для пізнання радіомаяка).
Відповідно до функціонального призначення в РМС метрового діапазону входять три канали (рис. 5.22): курсу, глісади і маркерний, кожен з яких містить відповідний радіомаяк і бортовий радіоприймач з індикаторним приладом – покажчиком курсу і глісади, а також із звуковими і світловими індикаторами коду МРМ.
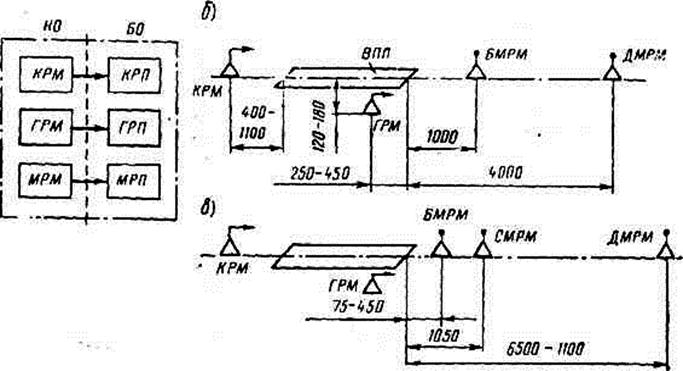
Рис. 5.22. Склад і розміщення радіомаяків радіомаякової системи типу ІLS або СП-50 при двомаркерної (б) і тримаркерної (в) комплектаціях.
|
|
|
В теперішній час використовується декілька вітчизняних радіомаякових систем посадки типу СП-50, СП-68, СП-70, СП-75, “ КУРС-МП ” і міжнародна ІLS.
Наземне обладнання, в залежності від комплектації, включає ближній, середній і дальній маркерні радіомаяки (БМРМ, СМРМ і ДМРМ) аеродрому, курсовий і глісадний радіомаяки (КРМ і ГРМ), командно-стартові радіостанції. На практиці інколи БМРМ і ДМРМ називають ближнім і дальнім приводом або ближнім і дальнім маркерами.
В радіомаякової системі посадки з двома маркерами ДМРМ розміщується по осі ЗПС на відстані 4000 м, а БМРМ – на відстані 1100 м від початку ЗПС по напряму заходу на посадку. КРМ розташовується по осі ЗПС в 400 – 1000 м від її кінця. ГРМ знаходиться збоку від ЗПС на відстані 120 – 180 м і в 250 – 450 м від її початку.
В радіомаякової системі посадки з трьома маркерами ДМРМ розміщується по осі ЗПС на відстані 6500 – 11000 м, СМРМ – на відстані 1050 м і БМРМ – на відстані 75 – 450 м від початку ЗПС по напряму заходу на посадку. КРМ і ГРМ розташовуються аналогічно з радіомаяками системи посадки з двома маркерами.
Як приклад на рис. 5.23 і 5.24 наведені діаграми спрямованості випромінювання наземних маяків систем посадки типу СП – 50 і типу ІLS.
а) б)
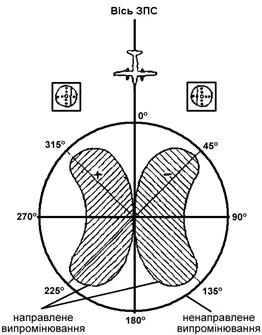
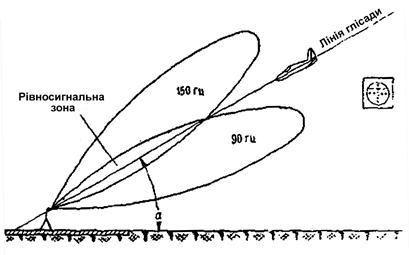
Рис. 5.23. Діаграми спрямованості випромінювання наземних маяків системи посадки типу СП – 50: а) – діаграма спрямованості курсового маяка в горизонтальній площині; б) – діаграма спрямованості глісадного маяка у вертикальній площині.
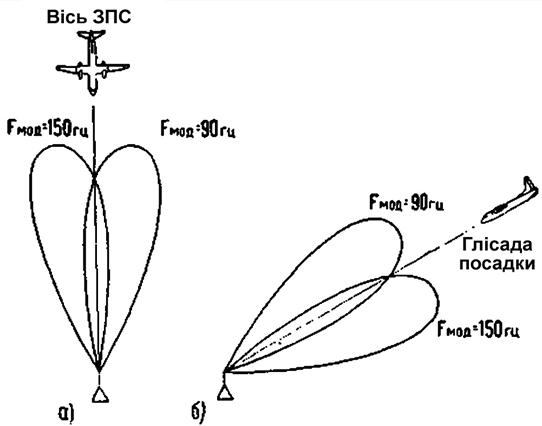
Рис. 5.24. Діаграми спрямованості випромінювання наземних маяків системи посадки типу ІLS:
а) – діаграма спрямованості курсового маяка в горизонтальній площині;
б) – діаграма спрямованості глісадного маяка у вертикальній площині.
На рис. 5.25 наведені діаграми спрямованості маркерних радіомаяків і лінія глісади літака при посадці під час проходження ним цих маяків.
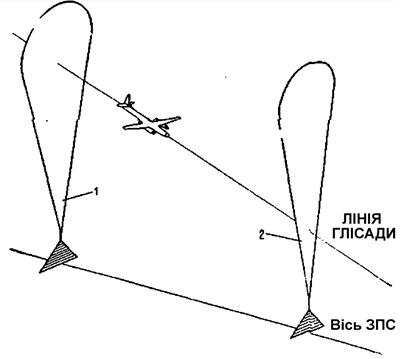
Рис. 5.25. Діаграми спрямованості маркерних радіомаяків і лінія глісади.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 1849; Нарушение авторских прав?; Мы поможем в написании вашей работы!