КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Правила аттестации
|
|
|
|
Структурная схема РТС с временным разделением каналов
Радиотелеметрические системы с временным разделением каналов
Структурная схема радиотелеметрической системы с ЧРК
Принцип частотного разделения каналов
Информационно-телеметрические системы с частотным разделением каналов
Основы линейного разделения сигналов
При линейном разделении сигналов групповой сигнал можно представить в виде:
где j1(t), j2(t),…., j N (t) - система функций, с помощью которых производится перенос информации; Ск - коэффициенты, отображающие мгновенные значения непрерывных сообщений, или числа, соответствующие символам дискретных сообщений.
Идеальный канальный селектор в канале с отсутствием помех должен реагировать только на сигналы данного канала и давать нулевой отклик на сигналы других каналов, т. е.

где R к - оператор разделения.
Эту операцию можно представить иначе:
или
Избирательные свойства устройства, состоящего из N канальных селекторов, каждый из которых реагирует только на свой сигнал  , впервые были описаны Д. В. Агеевым в 1935 году.
, впервые были описаны Д. В. Агеевым в 1935 году.
Линейное разделение сигналов возможно лишь в идеальном канале без помех при линейной независимости канальных сигналов  , справедливой, если тождество
, справедливой, если тождество

выполняется только тогда, когда  .
.
Принцип разделения сигналов наглядно демонстрируется при представлении группового сигнала  и канальных видеосигналов
и канальных видеосигналов  в виде векторов многомерного пространства.
в виде векторов многомерного пространства.
Для i -го источника множество его сигналов  с граничной частотой Fmi и длительностью Tci образует подпространство
с граничной частотой Fmi и длительностью Tci образует подпространство  мерностью
мерностью  . Видеосигналы
. Видеосигналы  , формируемые канальными модуляторами, представляются в виде векторов подпространства
, формируемые канальными модуляторами, представляются в виде векторов подпространства  мерностью
мерностью  . В общем случае
. В общем случае  . Например, при амплитудной модуляции
. Например, при амплитудной модуляции
|
|
|
 и
и 
На рис. 2 показаны подпространства  видеосигналов
видеосигналов  входящие в пространство
входящие в пространство  .
.
Разделение сигналов возможно, если подпространства не пересекаются ни в одной точке пространства , для которого  .
.
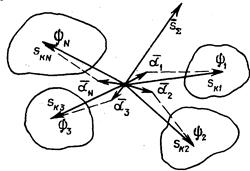
Рис. 2
В случае пересечения подпространств и  возникают переходные помехи.
возникают переходные помехи.
Каждое подпространство  задается направлением
задается направлением  . Вектор
. Вектор  в N -мерном пространстве можно разложить на N независимых векторов направлений
в N -мерном пространстве можно разложить на N независимых векторов направлений  , составляющих базис пространства, т.е. вектор
, составляющих базис пространства, т.е. вектор
 ,
,
где С i коэффициенты разложения, численно равные мгновенным значениям .
Величина вектора сигнала  получается путем отображения вектора
получается путем отображения вектора  на пространство
на пространство  таким образом, чтобы его проекции на остальные подпространства
таким образом, чтобы его проекции на остальные подпространства  были равны нулю.
были равны нулю.
Таким образом, при векторном представлении разделение сигналов есть разложение суммарного вектора по линейно-независимым направлениям. Это возможно, как упоминалось ранее при условии, что канальные видеосигналы являются линейно независимыми функциями времени.
Для N - мерного базиса скалярное произведение двух векторов
 ;
;
где  - модули векторов;
- модули векторов;
 -угол междуними.
-угол междуними.
Векторы 
 могут быть не только линейно-независимыми, но и ортогональными, т.е.
могут быть не только линейно-независимыми, но и ортогональными, т.е.
 .
.
Если
то базис называется ортонормированным.
Система функций  будет ортогональной и нормированной, если скалярное произведение
будет ортогональной и нормированной, если скалярное произведение
На приемной стороне канальный видеосигнал
 .
.
Из изложенного следует, что для канала без аддитивных помех многоканальные системы могут строиться на базе линейно-независимых неортогональных и линейно-независимых ортогональных переносчиков  . В реальных каналах с помехами используются ортогональные сигналы, обладающие более высокой помехоустойчивостью по сравнению с неортогональными сигналами. Ортогональные сигналы обладают и другими достоинствами: простотой технической реализации и возможностью в ряде случаев совмещать задачи разделения сигналов и демодуляции.
. В реальных каналах с помехами используются ортогональные сигналы, обладающие более высокой помехоустойчивостью по сравнению с неортогональными сигналами. Ортогональные сигналы обладают и другими достоинствами: простотой технической реализации и возможностью в ряде случаев совмещать задачи разделения сигналов и демодуляции.
|
|
|
К ортогональным относятся сигналы с неперекрывающимися частотными спектрами, которые получаются из сигналов  , прошедших через полосовые фильтры. На основе этих сигналов строятся системы с частотным разделением каналов (ЧРК). Дляних канальные сигналы являются ортогональными в частотной области, т.е.
, прошедших через полосовые фильтры. На основе этих сигналов строятся системы с частотным разделением каналов (ЧРК). Дляних канальные сигналы являются ортогональными в частотной области, т.е.
Ортогональными функциями времени являются периодические последовательности импульсов» не перекрывающиеся во времени. Наих основе строятся системы с временным разделением каналов (ВРК).
Ортогональными являются два гармонических колебания с одинаковыми частотами и со сдвигом фаз, равным p/2. Информация в такой двухканальной системе передается путем модуляции амплитуд гармонических колебаний информационными сигналами.
К числу ортогональных переносчиков, которые можно использовать для передачи дискретных сообщений, относятся функции вида cosw t, cos2w t, cos3w t,…, ортогональные полиномы Лежандра, Чебышева, Якоби, Лагерра, Эрмита и др., а также дискретные ортогональные последовательности в виде функций Уолша, Радемахера и др.
В телеметрии в основном применяются системы с временным и частотным разделением каналов.
В телеметрических системах с частотным разделением каналов (ЧРК) каждому каналу отводится своя полоса частот, не перекрывающаяся с соседней. Как видно на рис. 3, первому каналу отводится полоса частот D F 1= F 2- F 1, второму каналу отводится полоса частот D F 2= F 4- F 3 и т.д. Передача информации ведется одновременно по всем N каналам. Для разделения информационных сигналов достаточно иметь полосовые фильтры в соответствии с проведенным рассечением общей полосы на канальные полосы.
Частотное разделение в системах телеметрии осуществляется в видеотракте. При этом используется N гармонических колебаний, разнесенных по частотной оси и модулированных информационными сигналами.
В радиотелеметрических системах, являющихся, как правило, системами с двухступенчатой модуляцией, суммарный сигнал генераторов поднесущих колебаний используется далее для модуляции генератора несущих колебаний. В системах проводной телеметрии с ЧРК генератор несущих колебаний может отсутствовать.
|
|
|
Видеосигнал, несущий информацию всех каналов, принято называть групповым, а те части видеосигнала, которые переносят информацию отдельных каналов - канальными.
Рис. 3
Общая полоса частот, занимаемая групповым видеосигналом, равна сумме полос отдельных каналов, т.е.

Ширина спектра частот каждого канала зависит от вида модуляции поднесущих колебаний и ширины спектра частот первичных сигналов, передаваемых по этим каналам. Для уменьшения влияния соседних каналов спектры частот поднесущих колебаний разносятся так, чтобы между ними имелась некоторая неиспользуемая полоса частот D F з, называемая защитной.
Следует заметить, что изложенное выше касается идеального принципа частотного разделения каналов, когда сигнал каждого из них имеет ограниченную полосу частот и разделительный фильтр на приемной стороне выделяет только эту полосу. Реальные сигналы ограничены во времени, поэтому имеют бесконечный спектр. Отсюда возникает необходимость ограничения спектра передаваемых сигналов, что приводит к искажению их формы и взаимному влиянию каналов.
Структурная схема радиотелеметрической системы (РТМ) с ЧРК приведена на рис. 34. На передающей стороне (рис. 4, а) имеются: датчики (Д), усилительно-согласующие устройства (СУ), канальные модуляторы (КМ), генераторы поднесущих колебаний (ГПК), полосовые фильтры (ПФ), суммирующее устройство (S), вторичный модулятор (ВМ) и генератор несущих колебаний (ГНК).
Рис. 4
В состав приемно-регистрирующего устройства входят: усилители высокой и промежуточной частот (УВЧ, УПЧ), первичный демодулятор, полосовые фильтры, канальные демодуляторы (КД), регистрирующие устройства (РУ) и генератор меток времени (ГМВ).
Система работает следующим образом.
Сигналы датчиков подаются на входы канальных модуляторов через усилительно-согласующие устройства, которые выполняют функции усиления сигналов до стандартного значения, преобразования напряжения переменного тока в напряжение постоянного тока, а также функции согласования выходных сопротивлений датчиков с входными сопротивлениями информационных каналов. С помощью канальных модуляторов осуществляется амплитудная, частотная или фазовая модуляции колебаний ГПК. Полосовые фильтры предназначены для ограничения спектров модулированных колебаний до заданных значений (с учетом возникающих за счет этого искажений). В суммирующем устройстве производится линейное сложение видеосигналов каждого канала. Суммарный (групповой) сигнал подается на вход вторичного модулятора, с помощью которого производится модуляция несущих колебаний ГНК.
|
|
|
В передающем устройстве может осуществляться амплитудная (АМ), балансная (БМ), однополосная (ОМ), частотная (ЧМ) или фазовая (ФМ) модуляция.
Таким образом, с учетом модуляции на первой и второй ступени могут быть построены следующие радиотелеметрические системы с ЧРК: АМ-АМ, АМ-ЧМ, АМ-ФМ, ЧМ-АМ, ЧМ-ЧМ, ЧМ-ФМ, АМ-ОМ, ЧМ-ОМ, ФМ-ОМ, ФМ-АМ, ФМ-ЧМ, ФМ-ФМ и др.
По поводу последних четырех видов модуляции заметим следующие. Фазовая модуляция поднесущих колебаний менее удобна по сравнению с АМ и ЧМ, так как для передачи постоянной составляющей, которая может присутствовать в исходном сигнале, потребуется дополнительный канал опорного напряжения, с помощью которого можно было бы обнаружить постоянный фазовый сдвиг.
В приемном устройстве (рис. 4, б) осуществляется усиление принимаемых колебаний, их демодуляция и разделение по каналам. В качестве селекторов канальных сигналов используются полосовые фильтры. На выходе каждого канального демодулятора получается изменяющийся во времени сигнал, который в идеальном случае соответствует сигналу датчика. В регистрирующих устройствах принятые сигналы могут быть записаны в виде непрерывных кривых на фотопленку, магнитную ленту, фотобумагу и т.д.
В системе предусмотрена периодическая калибровка каналов, которая может осуществляться подачей калибрационных напряжений на входы информационных каналов. Такой метод обладает тем недостатком, что при измерении сравнительно быстро меняющихся параметров возможна потеря информации в момент передачи калибрационных уровней. Если все каналы РТС идентичны, то для передачи калибрационных сигналов может быть выделен один канал, который не структурной схеме показан штриховой линией.

Рис. 5
С целью привязки принимаемой информации ко времени на регистрирующие устройства подаются метки времени, вырабатываемые генератором меток времени (ГМВ). Сигналы точного времени могут вводиться и извне.
Наряду с частотным разделением каналов возможно построение систем с комбинированным (частотно-временным) разделением каналов.
С целью увеличения количества контролируемых параметров отдельные датчики, измеряющие медленно меняющиеся процессы, могут группами подключаться к одному каналу через программно-коммутирующие устройства (ПКУ). В этом случае на входы канальных модуляторов подаются сигналы указанных датчиков, разделенные во времени. Коммутация, структурная схема которой приведена на рис. 5, применяется для однотипных датчиков, имеющих достаточно высокое выходное напряжение. Систему с использованием программного коммутатора на входе информационного канала обозначают АИМ-ПМ-ПМ, где ПМ – произвольный (АМ, ЧМ или ФМ) вид модуляции.
На рис. 6 приведена схема коммутации выходных сигналов генераторов поднесущих колебаний, обозначаемая АМ-АИМ-ПМ. Такая система может использоваться при наличии разнотипных генераторов поднесущих колебаний или датчиков и при малом уровне выходных сигналов датчиков.

Рис. 6
Принцип временного разделения каналов.
Принцип временного разделения каналов (ВРК) иллюстрируется упрощенной схемой (рис. 7). В бортовой аппаратуре механический коммутатор, вращаемый мотором, поочередно подключает датчики Д1, Д2, …, ДN на вход формирователя телеметрического кода. В процессе коммутации получаются сигналы с амплитудно-импульсной модуляцией (АИМ). Величина амплитуды импульсов равна величине сигнала датчика во время подключения его к общему тракту. Таким образом, на входе кодера действует АИМ-сигнал, содержащий импульсы всех N информационных каналов (рис. 8).
|
Рис. 7
Передача сигналов датчиков происходит дискретно во времени. При вращении подвижного контакта коммутатора производится последовательный “опрос” датчиков. Частота, с которой производится “опрос” одного датчика, называется частотой опроса F 0. Она связана с периодом опроса соотношением
 .
.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 | |||||||
 | |||||||
 | |||||||
 | |||||||






|
|
|

|
 |  | ||||||||||||||||||
 |  | ||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 | |||||||||||||||||||
 |  | ||||||||||||||||||







|
|
|
Последовательность сигналов, соответствующих одному циклу опроса всех датчиков, называется кадром или циклом. Время Тк (рис. 7, а), отводимое в кадре для передачи информации одному каналу, называется канальным интервалом. Для передачи измерительной информации отводится лишь часть канального интервала, называемая измерительным интервалом Ти; остальные части канального интервала Тз, называемые защитными (рис. 7, б), используются для того, чтобы на приемной стороне можно было разделить каналы.
Кодер телеметрического сообщения преобразует сигналы с АИМ в более помехоустойчивые, чем АИМ, аналоговые или цифровые сигналы. К аналоговым сигналам относятся импульсы, модулированные по длительности, или, что, то же самое, по ширине (ДИМ, или ШИМ), и по временному положению, или, что то же самое, по фазе появления импульса (ВИМ, или ФИМ).
При ДИМ в зависимости от величины передаваемого параметра изменяется длительность t импульса (рис10, а). При этом положение одного из фронтов может быть фиксировано. При ВИМ в зависимости от величины параметра изменяется фаза появления импульса t относительно опорной точки, часто обозначаемой опорным импульсом (0 на рис. 10, в). Шкала L параметра соответствует временной шкале Тш положения измерительного импульса (И).
При цифровых методах передачи величина параметра преобразуется в цифровой код, или сигнал с кодоимпульсной модуляцией (КИМ). Чаще других используется двоичный код (рис. 10, д). Цифровая запись отсчета в канальном интервале часто называется словом.
Сигналы с выбранной импульсной модуляцией, снимаемые с выхода кодера, используются для модуляции высокочастотных колебаний передатчика (по амплитуде, частоте, фазе). Первая ступень модуляции осуществляется в кодере, вторая – в передатчике. Сигнал в радиолинии обозначается в соответствии с видом модуляции на первой и второй ступенях: ДИМ-ИМ, ВИМ-АМ, КИМ-ФИМ и т.д.
Принятые приемником сигналы детектируются. Для этого используются детекторы, соответствующие виду модуляции на второй ступени: АМ – амплитудный, ЧМ – частотный, ФМ – фазовый. В приемнике, таким образом, производится первая ступень демодуляции.
Вторая ступень демодуляции осуществляется декодером телеметрического сообщения. Часто в регистраторах записываются сигналы с ВИМ, КИМ и т.п.; в этих случаях вторая ступень модуляции отсутствует.
Синхронность и синфазность вращения коммутаторов бортовой и наземной аппаратуры обеспечивает разделение каналов и достигается за счет передачи специальных синхронизирующих сигналов, которые управляют работой генератора, задающего скорость и фазу вращения вала мотора в наземной аппаратуре. В итоге сигнал i- го датчика попадает в i- е регистрирующее устройство.
Видеокод на выходе кодера содержит информационные сигналы, сигнал синхронизации, а также некоторые служебные сигналы (уровни калибровки, время), и называется групповым сигналом (ГС), или телеметрическим кодом.
а)
 SS ДИМ (ШИМ)
SS ДИМ (ШИМ)



 t
t
 |
t

Тк

б)
U ДИМ-ЧМ


 t
t
t
 в)
в)
 SS ВИМ (ФИМ)
SS ВИМ (ФИМ)
о и о









 t
t
 |
Тш

Тк
 г)
г)
 U ВИМ-АМ
U ВИМ-АМ


 t
t
 |


 t
t
д)
SS КИМ
КИМ



 1 1 0 0 0 1 1 t
1 1 0 0 0 1 1 t
 |
t


 Тк
Тк
 |
е)
U КИМ-ФМ Q = p


 t
t
 |
Рис. 10. Преобразование сигналов на первой и второй ступенях модуляции.
Удобные для пояснения принципа ВРК механические коммутаторы находят ограниченное применение. Вместо них используются электронные коммутаторы (рис. 11). Распределитель импульсов выдает ряд последовательностей неперекрывающихся во времени импульсов (рис. 11, в). Он представляет собой либо многофазный генератор импульсов, либо счетчик с дешифратором, либо фазоращепитель. Электронные ключи К1, К2, …, КN в течении цикла коммутации Тц= Т 0 последовательно один за другим открываются сигналами Sк1, Sк2, …,SкN на время, равное канальному интервалу Тк, и пропускают сигналы датчиков Д1, Д2, …, ДN, также поступающих на их входы. В сумматоре S формируется последовательность сигналов с АИМ всех датчиков SS.
В наземной аппаратуре на вход коммутаторов подается групповой сигнал, а на выходе электронных ключей К1, К2, …, КN появляются сигналы отдельных каналов S1, S2, …, SN.
Начало цикла коммутации определяется маркерными синхроимпульсами Sм, следующими с периодом опроса Т 0; время, отводимое каналу, определяется периодом следования канальных синхроимпульсов Тк.

|



|
 S1 S1
S1 S1
 |  |
|
|
 |  |  | |||||
 | |||||||
|



 · ·
· ·

 · ·
· ·
· ·
|
|
|  | | |||||
| |||||||
 |  |
Sм Sм
 Sк Sк
Sк Sк
а) коммутаторы бортовой и наземной аппаратуры
 б) Sn
б) Sn
 |  |  |


 Тц t
Тц t
 | |||
 |
в) Sк
 |  |  |  |  | | | | |


 Тк t
Тк t
 | |||
 |
г) Sк1
 |  |  |
t
 дSк2
дSк2
 |
t
е)Sк3
 |  |
 t
t
ж)Sк4
 |
t







 з) SS
з) SS
 |  |


 1 2 3 4 1 2 3 4
1 2 3 4 1 2 3 4
 t
t
б) Временные диаграммы
Радиотелеметрическая система состоит из бортовой и приемно-регистрирующей аппаратуры (рис. 12). Первичный сигнал с выхода датчиков поступает на вход системы коммутации. Сигнальные и некоторые, относительно медленно меняющиеся параметры, предварительно поступают на устройства амплитудного и временного уплотнения (программно-коммутирующие устройства) соответственно. Использование устройств уплотнения позволяет передать по одному информационному каналу РТС сигналы нескольких датчиков и тем самым эффективно использовать пропускную способность отдельных каналов РТС.
 | |||||||||||||
 |
|
|
| ||||||||||
| |||||||||||||
 | |||||||||||||
 КД
КД
 | |||||||||||||||||||||||||
 | |||||||||||||||||||||||||
|  | ||||||||||||||||||||||||
 | |||||||||||||||||||||||||
 | |||||||||||||||||||||||||
| |||||||||||||||||||||||||
 |  |  |  | ||||||||||||||||||||||
 | |||||||||||||||||||||||||
| |||||||||||||||||||||||||
 | |||||||||||||||||||||||||
|
Д
 |  |  | |||||||||
 | |||||||||||
 | |||||||||||
 | |||||||||||



 Д
Д
 Fц Fк Fс Fсч
Fц Fк Fс Fсч
|
|
|
|
 | |||||||||
 |  | ||||||||
 | |||||||||
 |
а) бортовая аппаратура
|
|
|
|


 связи
связи

СЕВ
б) приемно-регистрирующая аппаратура
Рис. 12. Структурная схема РТС.
На вход системы коммутации поступают также уровни калибровки. В простейшем случае передается минимальное и максимальное напряжение измерительной батареи, питающей датчики. Этим самым передаются уровни сигнала, соответствующие 0% и 100% значениям параметра. Благодаря этому в приемно-регистрирующей аппаратуре получают данные об относительном масштабе зарегистрированных сигналов. В том случае, если тракт РТС нелинейный, передается больше двух уровней калибровки, например 11 уровней (через 10% шкалы каждый). Системой коммутации формируется АИМ сигнал, представляющий собой последовательность отсчетов всех измеряемых параметров и уровней калибровки. Для управления системой коммутации от хронизатора поступают маркерные и канальные синхроимпульсы.
Аналого-цифровой преобразователь (АЦП) преобразует каждый отсчет в цифровой код. Для его работы используются синхроимпульсы, следующие с частотой каналов Fк и символов кода Fс. В аналоговых системах АЦП нет.
а)
 SS
SS
 Измерительные каналы
Измерительные каналы
маркер






 1
1
· · ·


 0 Тк Тк1 Тк2 ТкN Тк
0 Тк Тк1 Тк2 ТкN Тк



 t
t
б)
 SS
SS
маркер о и о и о о и
 |  |  |  | | | |
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 642; Нарушение авторских прав?; Мы поможем в написании вашей работы!