КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Реализация векторного управления
|
|
|
|
Векторное управление может быть реализовано в частотно регулируемом электроприводе, как на основе АИТ с ШИМ, так и на основе АИН с ШИМ.
Одна из возможных схем управления на основе АИН с ШИМ представлена в виде структурной схемы.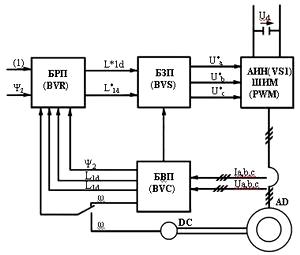 рис.35
рис.35
где БРП – блок регуляторов переменных
БЗП – блок задания переменных
БВП – блок вычисления переменных
ДС – датчик скорости
Рассмотрим системы управления двух видов:
· Сенсорная (ω измеряется)
· Бессенсорная (ω вычитается)
Положение переключателя на схеме соответствует бессенсорной схеме управления.
На вход блока регулирования переменных подают задающий сигнал ω или М, а также потокосцепление ротора ψ2. Кроме того, на БРП подается сигнал ОС с выхода БВП, ориентированные по значениям составляющих токов статора (I1М, I1ψ), а также потокосцепления ротора (ψ2, ω). БЗП осуществляет преобразование задающих переменных (I1М* I1ψ* - преобразованные входные задающие сигналы) в систему трехфазных сигналов управления АИН с ШИМ. Смысл преобразования заключается в координатном преобразовании параметров из неподвижной системы в подвижную ортогональную систему координат. Ориентация поля ротора АД заключается в совмещении продольной оси с вектором потокосцепления ротора. При этом достигается полное совпадение между I1М c I1g и I1d c I1ψ, а также достигается соответствие углов векторов ψ2 и ψ2d.
БВП вычисляет текущие значение амплитудных и фазных параметров, потокосцепления ротора ψ2, а также моментообразующей I1М и потокообразующей I1ψ тока статора, осуществляя преобразование реальных сигналов с выхода АИН с ШИМ. Надежность и стоимость системы управления, а также качество характеристик электропривода зависит от числа измеряемых параметров и от точности их измерения.
|
|
|
Для векторного управления АД необходимо измерять минимум два из четырех доступных для измерения переменных.
1. Токи в фазах статора (Ia, Ib, Ic)
2. Напряжения в фазах статора (Ua, Ub, Uc)
3. Угловая скорость вращения ротора (ω)
4. Положение ротора (угол отклонения ротора относительно вертикальной оси).
Наиболее простым и надежным является ЭП разомкнутый по скорости, т.е. не содержащий датчика скорости – бессенсорный ЭП.
В таких ЭП измеряется только ток и напряжении статора, а ω и s вычисляются в БВП. При этом в БВП задается модель которая учитывает типовые или реальноизмеренные активные и индуктивные сопротивления двигателя. Однако из-за сложности точного представления этих параметров (в частности невозможно учитывать зависимость активного сопротивления от температуры двигателя). Такие ЭП обладают невысокими регулируемыми свойствами (низкая точность при малых скоростях вращения) диапазон регулирования Д=100:1.
Значительно больший диапазон 1000:1 обеспечивают замкнутые по скорости ЭП (сенсорные), содержащие в своем составе электромеханические или цифровые датчики скорости, устанавливаемые на валу двигателя. Такие электроприводы меньшее надежны и имеют боле высокую стоимость.
Векторное управление частотно регулируемым электроприводом с ШИМ требуют высокой скорости вычислений и может быть реализовано на современных мощных цифровых микропроцессорных контроллерах. Требуется большое число датчиков, способных обеспечить высокую точность измерения.
, ЭП двойного питания, каскадные ЭП.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 566; Нарушение авторских прав?; Мы поможем в написании вашей работы!