КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приладів зрівноваження)
|
|
|
|
Особливості вимірювальних приладів з замкненою структурою
|
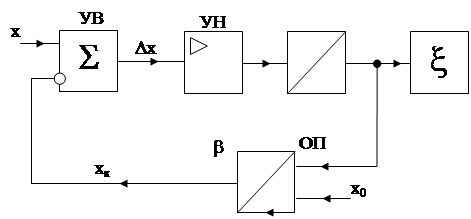 |
Х0 – вихідна величина міри;
Хк – компенсуюча величина.
а) з зрівноваженням при зміні відомої величини Хк.
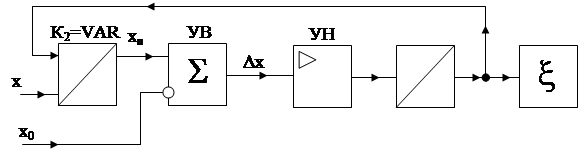 |
б) з зрівноваженням шляхом зміни величини хп, яка пропорційна вимірювальній х.
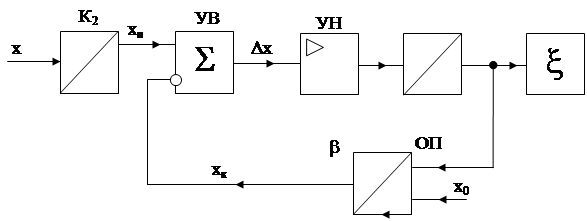 |
в) комбінована з зрівноваженням шляхом почергової або одночасної зміни хк та хп.
Де: Dх = х-хк – некомпенсація (діє на виході прямого кола);
Хк – величина, суворо пропорційна вихідній величині у (вихідна величина зворотнього зв’язку);
Х – невідома величина (компенсуюча величина);
Dх – використовється для автоматичної підтримки стабільності К;
b - коефіцієнт перетворення ОП;
хп – величина, пропорційна х.
Некомпенсація Dх підсилюється в прямому колі. Вихідна величина прямого кола змінюється до тих пір, поки не наступить становище
Х» хк.
Якщо У – вихідна величина приладу, то рівняння зворотного перетворювача буде:
хк = b×У = Х.
Таким чином встановлюється пряма пропорційність між Х та У.
Автоматично зрівноважити прилад, в якому відбувається порівняння двох величин невідомої Х та відомої хк = к1×х0 можливо одним з методів:
1) Зміною хк до величини Х = хк. В цьому випадку відбувається компенсація Х і завдяки цьому споживання потужності від джерела вимірюваного сигнала мінімальне (схема а). По такій схемі виконана більшість приладів зрівноваження.
2) Зміною величини хп, пропорційної Х з допомогою керованого передввімкненого маштабного перетворювача К2 (рис. б) аж до одержання рівняння: хп = К2×Х = х0.
3) Почерговою або одночасною зміною відомої величини хк та величини хп, пропорційній Х (рис. в) аж до одержання рівності: хп = Х×К2 = к1×х0.
|
|
|
Розрізняють дві групи АВП зрівноваження:
1) АВП з статичною характеристикою (АВП з с.х.). Це компенсаційні прилади з глибоким зворотним зв’язком.
2) АВП з астатичною характеристикою (АВП з а.х.). Це автоматичні компесатори (автокомпесатори) постійного та змінного струму, автоматичні мости.
 |
Структури АВП зрівноваження слідуючі:
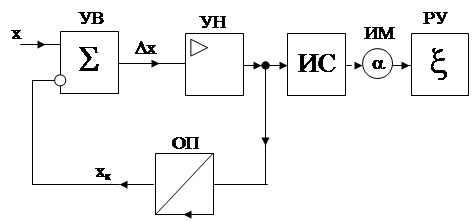
ИС – вимірювальна схема приладу;
ИМ – вимірювальний механізм;
РУ – регіструючий пристрій.
а) АВП з с.х.
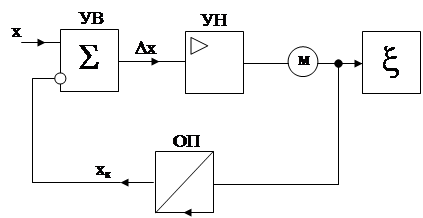 |
В цих приладах (рис. а) вихідна величина замкненої частини схеми, як правило напруга або струм. Вона зручна для точного вимірювання вихідними приладами. ОП, як правило – опори або подільники. Вони прості та надійні ланки, відрізняються високою стабільністю.
М – інтегруючий перетворювач (реверсивний двигун).
б) АВП з а.х. першого роду (з однією інтегруючою ланкою).
До цих приладів (рис. б) відносятся автокомпенсатори постійного та змінного струму, автоматичні мости. Вихідною величиною замкненої частини схеми в цих приладах являється кут a або переміщення l, зручні для квантування, точного вимірювання та регістрації. Але зворотні перетворювачі a®х або l®х в цьому випадку більш складні та менш стабільні. Прилади з статичною характеристикою відрізняються від приладів з астатичною характеристикою наявністю інтегруючих перетворювачів (реверсивних двигунів). В залежності від числа інтегруючих ланок розрізняють АВП з а.х. першого роду (з одним двигуном) та АВП з а.х. другого роду – з двома двигунами.
Динамічні характеристики засобів вимірювань.
Динамічні характеристики засобів вимірювань розділяються на повні та часткові. Повною динамічною характеристикою називається характеристика, яка однозначно визначає коливання вихідного сигнала засобу вимірювання при будь-яких змінах інформаційного та неінформаційного параметрів вхідного сигнала та впливаючої величини. Частковою динамічною характеристикою називається функціонал або параметр повної динамічної характеристики (наприклад, полоса пропускання, затухання, час установлення вихідного сигнала та ін.).
|
|
|
Повними динамічними характеристиками являються:
- диференційні рівняння;
- імпульсна характеристика h(t);
- перехідна характеристика h’(t);
- передавальна функція W(p);
- сукупність амплітудно-частотних А(w) та фазочастотних j(w) характеристик.
Частковими динамічними характеристиками являються:
- окремі параметри повних динамічних характеристик, наприклад, постійна часу, час запізнення;
- характеристики, які лише частково характеризують динамічні властивості засобів вимірювань, наприклад час установлення вихідного сигнала.
Динамічні властивості АВП зрівноваження
(компесаційних приладів).
При одній ланці в прямому колі передавальна функція замкненої частини АВП зрівноваження буде:
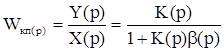 ,
,
де: кп – компенсійного перетворювача (приладу);
К(р) – передавальна функція;
b(р) – коефіцієнт передачі зворотного перетворювача.
При трьох ланках в прямому колі:

З урахуванням того, що:

зображення некомпесації
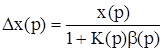 ,
,
тобто, некомпесація АВП зрівноваження Dх залежить від коефіцієнтів перетворення та закона зміни Х. Градуювання вимірювального приладу при 10…15 значеннях Х, тому некомпенсація враховується при градуюванні по всій шкалі і в статичному режимі роботи приладу похибки не створює.
В усталених режимах (тобто при Х=const; dx/dt=const; d2x/dt2=const) вихідна величина У як функція величини некомпенсації Dх буде:
У(р) = К1(р)К2(р)К3(р)Dх(р) = К(р)×Dх(р).
Передавальна функція прямого кола (при наявності в ньому інтегруючих ланок) буде:

В цьому випадку зображення вихідної величини:

Знаючи зображення У(р) визначимо її оригінал У(t) як функцію часу при різних значеннях некомпесації Dх.
Скористаємося теоремою про кінцеві значення часової функції при t=¥ в її оберненому вигляді.
 .
.
В АВП зрівноваження з статичною характеристикою при DХ(р) = DХ0 = const та відсутності інтегруючих ланок (n=0) стале значення вихідної величини буде:
|
|
|
 .
.
При DХ0 = 0 вихідна величина Ууст та компесуюча хк рівнялися б нулю, тобто в компесаційних приладах повна компенсація неможлива.
В АВП зрівноваження з астатичною характеристикою першого порядку (при наявності в прямому колі однієї інтегруючої ланки n=1) зображення вихідної величини буде:
 .
.
Так як в цьому випадку при DХ¹0, Ууст безперервно зростає, перша похідна (при DХ(р) = DХ0) буде:
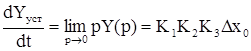 ,
,
тобто DХ0 залежить від швидкості зміни Х.
При DХ0 = 0, Ууст = const (постійна за значенням).
В режимі повної компенсації вхідна величина також постійна Х = const.
Режим повної компесації в автокомпесаторах з астатизмом першого роду теоретично можливий тільки при незмінності вхідної величини (х = const).
В АВП з а.х. другого порядку (з двома інтегруючими двигунами, тобто n=2) після аналогічних перетворень маємо:
 .
.
Тобто, Dх0 залежить тільки від другої похідної х’’(t). В таких приладах можлива повна компенсація (тобто Dх0=0) не тільки при У = const та X = const, але й при dy/dt=const та dx/dt=const.
АВП з а.х. другого порядку (з двома інтегруючими двигунами) являються структурно нестійкими системами і можуть працювати стійко тільки при введенні гнучких стабілізуючих зворотних зв’язків.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 374; Нарушение авторских прав?; Мы поможем в написании вашей работы!