КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Частотно-регулируемый электропривод
|
|
|
|
В современных электроэнергетических установках различного назначения широкое применение получили частотно-регулируемые электроприводы переменного тока на основе асинхронных двигателей с короткозамкнутым ротором и статических преобразователей частоты. Силовая часть таких электроприводов независимо от алгоритма управления (скалярного или векторного) выполняется по типовой схеме, приведенной на рисунке 5.
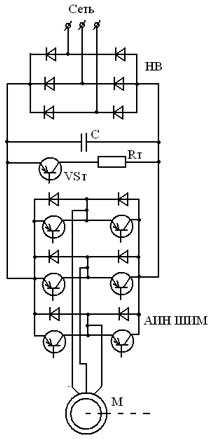
Рисунок 5. Типовая схема силовой части частотно-регулируемого
электропривода
В состав силовой части электропривода входят: исполнительный двигатель (М), статический преобразователь частоты, содержащий неуправляемый выпрямитель (НВ) и автономный инвертор с широтно-импульсной модуляцией напряжения (АИН ШИМ). Кроме того, в состав силовой части электропривода входит звено, обеспечивающее режим генераторного торможения и состоящее из тормозного резистора RT накопительного конденсатора С и транзисторного ключа VST.
Режим генераторного торможения наступает автоматически в тех случаях, когда по каким-либо причинам частота вращения ротора превысит частоту вращения магнитного поля. В этом режиме активная составляющая тока статора изменяет свое направление в результате чего происходит заряд конденсатора С через обратные диоды автономного инвертора напряжения. При этом, как только напряжение на зажимах звена постоянного тока достигает заданной величины, открывается транзисторный ключ VST и конденсатор начинает разряжаться на тормозной резистор Rт. При уменьшении напряжения до первоначального значения транзисторный ключ VST выключается и снова начинается процесс заряда конденсатора. Процессы заряда и разряда конденсатора происходят до тех пор, пока существует режим торможения. В процессе генераторного торможения механическая энергия двигателя, превращаясь в электрическую энергию, рассеивается на тормозном резисторе в виде тепла.
Важнейшим преимуществом генераторного режима торможения является его органичность, заключающаяся в том, что он возникает автоматически. То есть для его реализации не требуется применять схемотехнические или алгоритмические решения. В то же время этому способу присущ и серьезный недостаток, заключающийся в наличие в составе электропривода тормозного резистора. Включение в состав электропривода этого элемента приводит к значительному увеличению удельных массогабаритных показателей электропривода в целом. Кроме того, если работа электропривода сопровождается частыми сменами режимов, то возникает проблема отвода тепла, выделяющегося на тормозном резисторе. Указанные недостатки особую актуальность принимают при создании автономных электроприводов, к массогабаритным характеристикам которых предъявляются жесткие требования.
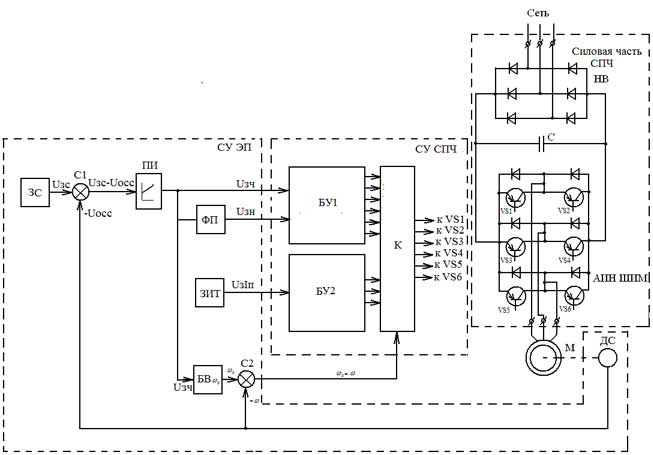
Рисунок 6. Функциональная схема частотно-регулируемого
электропривода с динамическим торможением
В соответствии с функциональной схемой в состав электропривода входят:
- исполнительный двигатель (М);
- статический преобразователь частоты (СПЧ), состоящий из силовой части и системы управления статическим преобразователем частоты (СУ СПЧ);
- система управления электроприводом (СУ ЭП).
В качестве исполнительного двигателя в электроприводе используется асинхронный двигатель с короткозамкнутым ротором. Силовая часть СПЧ включает в себя неуправляемый выпрямитель (НВ), автономный инвертор напряжения с широтно-импульсной модуляцией (АИН ШИМ) и конденсатор в звене постоянного тока С. Система управления статическим преобразователем состоит из трех блоков:
- блок БУ1, формирующий импульсы управления полупроводниковыми ключами VS1-VS6, которые обеспечивают синусоидальную широтно-импульсную модуляцию трехфазного выходного напряжения статического преобразователя частоты при работе электропривода в двигательном режиме;
- блок БУ2, формирующий импульсы управления полупроводниковыми ключами VS2, VS3, которые обеспечивают широтно-импульсную модуляцию постоянного напряжения, прикладываемого к двум последовательно соединенным фазам обмотки статора при работе электропривода в режиме динамического торможения;
- коммутатор прохождения импульсов управления K.
Система управления электроприводом включает в себя следующие элементы и блоки:
- блок задания скорости (ЗС);
- датчик скорости ДС;
- пропорционально-интегральный регулятор (ПИ);
- два сумматора С1 и С2;
- функциональный преобразователь (ФП);
- задатчик интенсивности торможения (ЗИТ);
- блок вычисления синхронной частоты вращения (БВ ω0).
При работе в двигательном режиме электропривод представляет собой замкнутую систему автоматического регулирования с обратной связью по частоте вращения. Требуемое значение частоты вращения двигателя устанавливается с помощью ЗС, сигнал с выхода которого поступает на положительный вход сумматора С1. На отрицательный вход сумматора С1 поступает сигнал, пропорциональный фактической частоте вращения двигателя. Разность сигналов, снимаемая с выхода сумматора С1 поступает на вход пропорционально-интегрального регулятора, который задает необходимую форсировку изменения частоты напряжения и величины напряжения на выходе статического преобразователя частоты. Функциональный преобразователь ФП выполняет необходимую связь между частотой напряжения и действующим значением напряжения на выходе СПЧ.
При резком уменьшении сигнала задания частоты вращения UЗС сигнал задания частоты напряжения UЗЧ на выходе СПЧ также резко уменьшится, в результате чего двигатель должен будет перейти в режим генераторного торможения. Но в рассматриваемом электроприводе используется режим не генераторного, а режим динамического торможения.
Принудительный перевод двигателя в режим динамического торможения производится следующим образом. Сигнал задания частоты напряжения UЗЧ поступает в блок вычисления синхронной частоты вращения двигателя.
Сигнал пропорциональный вычисленному значению синхронной частоты вращения ω0 поступает на положительный вход сумматора С2. На отрицательный вход сумматора С2 поступает сигнал пропорциональный фактическому значению частоты вращения двигателя. Разность между этими сигналами поступает на вход коммутатора цепей сигналов управления К. Как только эта разность становится отрицательной, коммутатор К срабатывает, отключая драйверы полупроводниковых ключей VS1-VS6 от блока управления БУ1 и подключая драйверы полупроводниковых ключей VS2, VS3 к блоку управления БУ2. Блок управления БУ2 вырабатывает периодическую последовательность импульсов управления, коэффициент заполнения которых определяется величиной сигнала, поступающего от задатчика интенсивности торможения. Чем больше величина этого сигнала, тем больше величина коэффициента заполнения импульсов постоянного напряжения на выходе СПЧ, тем больше величина постоянного тока, протекающего по фазам обмотки статора, и, следовательно, тем интенсивней будет проходить режим динамического торможения.
Как только в результате торможения частота вращения двигателя станет меньше синхронной, разность сигналов на выходе сумматора снова станет положительной и коммутатор К подключит драйверы полупроводниковых ключей VS1-VS6 к выходу блока СУ1. В результате этого двигатель перейдет из режима динамического торможения в двигательный режим работы с новой частотой вращения.
Таким образом, электропривод, выполненный по рассматриваемой функциональной схеме, в режимах регулирования частоты вращения в сторону увеличения работает аналогично электроприводам со скалярным управлением, выполненных по типовой схеме. В режимах регулирования частоты вращения в сторону уменьшения, а также в режимах экстренного торможения используется режим динамического торможения, в котором с обмотки статора снимается трехфазное переменное напряжение, а на две фазы обмотки, соединенные последовательно подается постоянное напряжение.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 1871; Нарушение авторских прав?; Мы поможем в написании вашей работы!