КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Обмен по прямому доступу в память
|
|
|
|
Обмен по прямому доступу в память происходит без участия процессора. Он используется внешними устройствами для обмена с памятью большими массивами информации. Кроме требования большого размера массива информации режим прямого доступа в память необходим при обмене с большой скоростью. ВУ, которое производит обмен, запрашивает у процессора магистраль. Далее процессор на границе циклов обмена освобождает магистраль и устройства ввода вывода начинает обмен. При этом схема ПДП формирует такие же сигналы на магистрали, как и сам процессор. Подобная схема обладает достаточной сложностью, поэтому её наличие должно быть обосновано. Обычно обмен в режиме ПДП осуществляет специальное устройство, называемое контроллер ПДП. Первоначально микропроцессор программно записывает в контроллер ПДП адрес первой ячейки ЗУ, где хранятся массив информации, количество ячеек и особенности режима обмена. К особенностям относятся: направление обмена (из ЗУ или в ЗУ), режим обмена и др. Различают монопольный и мультиплексный режимы. В монопольном режиме контроллер ПДП захватывает магистраль и не отпускает её, пока не передаст весь массив информации. Достоинство: быстрый обмен. Недостатки: другие устройства не могут выйти на магистраль. В монопольном режиме работают те устройства, которые обмениваются данными на больших скоростях.
В мультиплексном режиме магистраль освобождается после каждого цикла обмена. Такой обмен применяется с медленными устройствами.
Например ПДП может также использоваться для перекачки массивов информации с одного места памяти в другое. (но в этом случае необходимо 2 контроллера).
Обмен по прерыванию.
Процесс прерывания работы микропроцессора сигналами от ВУ устраняет необходимость частой и неэффективной проверки готовности ВУ к обмену. Момент возникновения прерывания не связан с работой процессора в основной программе. Следовательно микропроцессор должен прервать выполнение основной программы, запомнить все данные необходимые ему для продолжения выполнения основной программы и выйти на программу обработки прерываний. Процессор прерывается закончив выполнение очередной команды. Это связано с тем, что в этот момент количество информации, которую нужно запомнить минимально. Возможна ситуация, когда после выхода на программу обработки прерывания возникнет ещё один сигнал прерывания от другого устройства, т.е. возможно вложение прерываний. В этом случае говорят об уровне прерывания. Уровень прерывания показывает сколько раз микропроцессор выходит на обработку прерываний без возврата к предыдущей программе. Современные микропроцессоры теоретически могут обеспечить бесконечное число уровней прерывания. Практически это ограничено памятью. Информация, которую микропроцессор должен запомнить при выходе в прерывание, копирует в стек. Стек – это память магазинного типа. Он состоит из некоторой последовательности ячеек, организованных таким образом, что чтение информации из них происходит в обратном порядке по сравнению с записью. Доступ к стеку в каждый момент времени возможен только к одной ячейке, называемой вершиной стека. Чтобы не создавать новый вид память в составе ЭВМ в качестве стековой памяти используется основная память системы. В состав микропроцессора вводится специальный регистр, называемый указателем стека (SP). В нём записан адрес вершины стека. При записи в стек содержимое указателя стека уменьшается, а при чтении увеличивается. При таком алгоритме работы указателя стека, стек необходимо располагать в районе старших адресов доступной памяти.
|
|
|
Прерывания бывают внешние, внутренние и программные.
|
|
|
Внешние прерывания вызываются внешними сигналами (по отношению к микропроцессору).
Внутренние прерывания возникают автоматически при некоторых ситуациях, когда нормальное выполнение программы невозможно (например деление на 0).
В отличии от внешних и внутренних прерываний, которые являются аппаратными, программные прерывания представляют собой команды на которые процессор реагирует также как и на прерывания (отсюда их название).
Внешние прерывания подразделяются на маскируемые и немаскируемые. Реакция процессора на маскируемые прерывания может быть программно запрещена, что делает систему более гибкой.
При одновременном возникновении нескольких прерываний необходимо определить последовательность их обработки. В этом случае говорят о приоритетах прерываний. Иногда приоритеты жёстко зашиты в аппаратной части, иногда они могут быть изменены программно.
Приход сигнала запроса прерывания требует, чтобы микропроцессор начал выполнять определённую программу обработки прерывания. Скорее всего для каждого прерывания это своя программа. Т.е. микропроцессор должен определить устройство, которое вызвало прерывание и ответить этому устройству, что его прерывание начало обрабатываться. Этот процесс может быть организован несколькими способами и отвечает за него устройство, называемое арбитром прерываний:
1. Некоторые микропроцессоры имеют несколько входов запроса прерываний и к каждому их этих входов подключено одно устройство (например 1821ВМ85А).
2. Микропроцессор имеет 1 вход запроса прерывания к которому подключается выход арбитра прерываний. Он имеет несколько входов запроса прерываний, а логика его работы программируется.
3.  Используется «ныряющий провод. Сигнал от микропроцессора проходит последовательно через все устройства. Внутренняя схема каждого устройства перехватывает этот сигнал если данное устройство выработало запрос прерывания или пропускает дальше, если устройства не вызывало прерывания. Это так называемый распределённый арбитр прерываний. Устройства расположенные ближе к микропроцессору имеют более высокий приоритет. Если к одному проводу запроса прерывания подключено несколько устройств, то в состав каждого их этих устройств вводится специальный программно доступный регистр, называемый регистром состояния. Одновременно с запросом прерывания устройство взводит определённый разряд в этом регистре. Процессор последовательно опрашивает регистры состояний и находит устройства, вызывавшее прерывание. Такой подход позволяет разделить несколько запросов пришедших одновременно.
Используется «ныряющий провод. Сигнал от микропроцессора проходит последовательно через все устройства. Внутренняя схема каждого устройства перехватывает этот сигнал если данное устройство выработало запрос прерывания или пропускает дальше, если устройства не вызывало прерывания. Это так называемый распределённый арбитр прерываний. Устройства расположенные ближе к микропроцессору имеют более высокий приоритет. Если к одному проводу запроса прерывания подключено несколько устройств, то в состав каждого их этих устройств вводится специальный программно доступный регистр, называемый регистром состояния. Одновременно с запросом прерывания устройство взводит определённый разряд в этом регистре. Процессор последовательно опрашивает регистры состояний и находит устройства, вызывавшее прерывание. Такой подход позволяет разделить несколько запросов пришедших одновременно.
|
|
|
При обработке прерываний в стек прежде всего записывается адрес команды, которая будет выполняться при выходе из подпрограммы обработки прерываний. В большинстве процессоров данная операция выполняется автоматически. При необходимости в стек записываются содержимое внутренних регистров микропроцессора, а также состояние флагов. Местонахождение программы обработки прерывания может быть также определено по разному:
1. Микропроцессор с несколькими входами запроса прерываний. Чаще всего начинает искать подпрограмму обработки прерывания в строго определённом месте в зависимости от того, по какому входу пришло прерывание (например в микропроцессоре 1821).
2. В системе с контроллером прерываний местоположение программы обработки прерываний задаётся программно для каждого входа прерываний.
3. Некоторые системы построены таким образом, что в ответ на сигнал микропроцессора о начале обработки прерывания, то устройство, которое вызвало прерывание выдаёт по шине данных так называемый вектор прерываний. Процессор по специальной таблице, хранящейся в памяти определяет местоположение подпрограммы обработки прерывания по входу вектора прерывания. В частном случае вместо вектора прерывания может выдаваться непосредственно адрес подпрограммы обработки прерывания.
Микропроцессор 580ВМ80.
8-ми разрядный микропроцессор 580ВМ80 выполнен по n-МОП технологии, которая было наиболее прогрессивной в момент его создания. По этой причине микропроцессор требовал наличие 3-х питающих напряжений: -5В для питания подложки, +5В – основная часть, +12В – выходные ключи. Уровни выходных и входных сигналов совместимы с ТТЛ уровнями. Тактовая частота процессора должна находиться в пределах от 0,5 до 2МГц. Это связано с наличием динамических структур в схеме микропроцессора. Адресная магистраль процессора 16-ти разрядная, поэтому он может адресовать 64К ячеек. Микропроцессор может адресовать также до 256 портов ввода вывода.
|
|
|
 схема с тремя состояниями
схема с тремя состояниями
ßà провода вход и выход
С1, С2 – тактовые входы. Микропроцессор требует наличие двух тактовых последовательностей формируемых по определённому закону.
D0…D7 – двунаправленная шина данных.
RESET - сигнал начального сброса. По этому сигналу обнуляется счётчик команд, а также запрещается реакция на запрос прерывания.
READY – сигнал готовности, который выдаёт то устройство с которым взаимодействует процессор в данном цикле обмена. Сигнал предназначен для медленно действующих устройств. При отсутствии сигнала готовности микропроцессор переходит в режим ожидания и пропускает несколько тактов тактовой частоты. Если в системе присутствуют только быстродействующие устройства сигнал READY подключается к уровню 1.
INTR – вход запроса прерывания.
HOLD – сигнал запроса прямого доступа в память.
A0…A15 – 16-ти разрядная шина адреса. по ней выдаётся адрес ячейки памяти с которой взаимодействует процессор или адрес порта ввода вывода. Адрес порта передаётся и в старшем байте и в младшем байте.
SYNC – синхросигнал передачи адреса.
DBIN – синхросигнал чтения данных. По этому сигналу данные поступающие по шине данных D0…D7 фиксируются внутри микропроцессора.
WR – синхросигнал записи данных. По этому сигналу данные выводятся из процессора.
WAIT – сигнал ожидания. Когда процессор не выполняет никакой работы он сообщает об этом сигналом WAIT.
INTA – сигнал подтверждения обработки прерывания. Он говорит о том, что микропроцессор начал обрабатывать прерывание. Обработки прерывания начинается на границе между двумя командами.
HLDA – сигнал подтверждения режима ПДП. По этому сигналу микропроцессор освобождает магистрали, в частности магистраль данных, магистраль адреса. выход на режим ПДП осуществляется на границе циклов обмена по магистрали.
Все функциональные узлы микропроцессора сосредоточены вокруг единой внутренней магистрали.
 Процесс выполнения команды идёт следующим образом: из счётчика команд (РС) через буфер адреса (БФА) выдаётся адрес ячейки, где хранится код команды. Он попадает на адресную магистраль (МА). Из ячейки памяти по шине данных выдаётся код команды. Он проходит через регистр данных (РгД) и заносится в регистр команд (РгК). Далее эту команду дешифрирует дешифратор команд, который выдаёт специальные сигналы на устройство управления. Устройство управления управляет всей схемой. Кроме того УУ вырабатывает магистральные управляющие сигналы.
Процесс выполнения команды идёт следующим образом: из счётчика команд (РС) через буфер адреса (БФА) выдаётся адрес ячейки, где хранится код команды. Он попадает на адресную магистраль (МА). Из ячейки памяти по шине данных выдаётся код команды. Он проходит через регистр данных (РгД) и заносится в регистр команд (РгК). Далее эту команду дешифрирует дешифратор команд, который выдаёт специальные сигналы на устройство управления. Устройство управления управляет всей схемой. Кроме того УУ вырабатывает магистральные управляющие сигналы.
Большинство команд выполняет АЛУ. Оно получает данные через буферный регистр (БФРг). Эти данные могут приходить как из внешней магистрали данных, так и из одного из регистров (вся табличка). В большинстве операций один из операндов хранится в аккумуляторе (А), туда же записывается и результат операции. В результате выполнения некоторых операций формируются флаги, которые хранятся в регистре флагов. В данном микропроцессоре 5 признаков: Z – признак 0, С – признак переноса или переполнения, S – признак знака, Р – признак паритета, АС – признак дополнительного переноса между 3-м и 4-м разрядом (нужен для работы с двоично-десятичной системой.
Десятичный корректор осуществляет перевод результатов в двоично-десятичную систему.
Внутри микропроцессора расположены 8 ячеек сверхоперативной памяти (W, Z, B, C, D, E, H, L). Из них W и Z программно недоступны. Они используются для хранения промежуточных результатов. Для работы со стеком в схему введён 16-ти разрядный указатель стека.
Синхронизация работы микропроцессора. Микросхема 580ГФ24.
Процессор выполняет программу, состоящею из отдельных команд. Во время выполнения команды происходит извлечение кода команды из памяти ЭВМ, дешифрация команды, подготовка данных для выполнения команды, выполнение команды и запись результата. Очевидно, что все эти действия должны выполняться в строгой последовательности. Для выполнения последовательности действий микропроцессору необходимо наличие тактовых сигналов, которые синхронизируют работу отдельных блоков.
Код команды и данные располагаются в памяти. Для извлечения их оттуда необходимо произвести обмен по магистрали. Обмен также необходим и при записи результата.
Машинный цикл – это время в течении которого происходит извлечение или запись одного байта информации из памяти и выполнение команды, если команда однобайтная. Для выполнения одной команды необходимо от одного до пяти машинных циклов. В течении одного машинного цикла происходит выдача процессором адреса ячейки памяти с которой он хочет обменяться, байта состояния, далее производится обмен данными и дешифрация кода команды, если читается код команды. Это множество действий требует машинных тактов.
Микропроцессор требует 2 сдвинутые во времени последовательности синхросигналов С1 и С2. На формирование этих последовательностей сигналов накладываются строгие ограничения. Первоначально тактовые сигналы формировались с использованием «россыпи» (логических микросхем и триггеров). Позднее была создана специальная микросхема, формирующая тактовые сигналы. Она генерирует одну из возможных последовательностей синхросигналов.
Схема формирования синхросигналов занимала не очень много места в микросхеме, поэтому на микросхему были возложены ещё 3 функции:
1. Выработка синхросигнала для считывания байта состояния.
2. Схема привязки сигнала готовности к тактовой последовательности микропроцессора.
3. Формирование сигнала начального сброса.
 х – означает, что сигнал не 0 или 1, а другой формы (не логической).
х – означает, что сигнал не 0 или 1, а другой формы (не логической).
Х1, Х2 – входы для подключения кварца.
TANK – сигнал для подключения внешнего колебательного контура, если кварц работает не на основной гармонике (задача подавить первую гармонику и выделить например третью).
OSC – выход генератора (частота F на диаграмме). Эта частота в 9 раз выше чем С1 и С2.
C1, C2 – тактовые сигналы, поступающие на микропроцессор с уровнем +12В. Все остальные имеют уровень ТТЛ.
C2T – сигнал С2, только уровня ТТЛ. Этот сигнал поступает на магистраль и бывает нужен некоторым устройствам.
SYNC – сигнал синхронизации адреса, который (сигнал) поступает от микропроцессора.
STSTB – синхросигнал байта состояния.
RDIN – сигнал готовности, поступающий от внешних устройств.
READY – это тот же сигнал, но привязанный к тактовой сетке.
RESIN – аналоговый сигнал начального сброса.
RESET – цифровой сигнал начального сброса привязанный к тактовой частоте.
Типы машинных циклов микропроцессора 580ВМ80. Микросхема 58ВК28/38.
При обмене по магистрали микропроцессор использует 10 различных типов машинных циклов:
1. Извлечение кода команды – цикл М1.
2. Чтение данных из памяти.
3. Запись данных в память.
4. Чтение данных из стека.
5. Запись данных в стек.
6. Чтение данных из устройства ввода вывода.
7. Запись данных в устройство ввода вывода.
8. Цикл обслуживания прерывания.
9. Цикл останова.
10. Цикл обслуживания прерывания в останове.
Для того, чтобы устройства, взаимодействующие с микропроцессором знали какую операцию выполняет микропроцессор в данном машинном цикле в начале каждого машинного цикла микропроцессор формирует байт состояния. Байт состояния выдаётся по шине данных. Байт состояния имеет следующее назначение разрядов:
Д0 – обслуживание сигнала запроса прерывания.
Д1- направление передачи информации (от/в микропроцессор).
Д2 – обмен со стеком.
Д3 – обслуживание останова.
Д4 – обмен с портом ввода вывода.
Д5 – цикл М1.
Д6 – ввод или вывод из внешнего устройства.
Д7- обмен с памятью.
Для того, чтобы разряды байта состояния использовались для управления работой других устройств, их необходимо зафиксировать и сформировать из них управляющие сигналы. Первоначально это делалось с помощью простых логических схем. В последствии появилась микросхема 580ВК28/38. Попутно с этой функцией микросхема 580ВК28/38 выполняет умощнение сигналов шины данных.
 Д0…Д7 – магистраль данных, поступает от микропроцессора.
Д0…Д7 – магистраль данных, поступает от микропроцессора.
ДВ0…ДВ7 – умощнённая магистраль данных.
STSTB – синхросигнал считывания байта состояния, идёт с микросхемы 580ГФ24.
DBIN – синхросигнал чтения данных, поступает от микропроцессора, управляет направлением передачи.
WR – синхросигнал записи, идёт от микропроцессора, управляет направлением передачи, но в обратную сторону (в отличии от DBIN): данные с шины Д идут в ДВ.
HLDA – сигнал подтверждения ПДП, идёт от микропроцессора. В данной микросхеме он переводит выходы в третье состояние.
BUSEN – отключает выходную шину данных (вспомогательный сигнал).
MEMR – синхросигнал чтения их памяти.
MEMW – синхросигнал записи в память.
I/OR - синхросигнал чтения из устройства ввода вывода.
I/OW – синхросигнал записи в устройство ввода вывода.
INTA - сигнал подтверждения прерывания.
Обмен микропроцессора 580ВМ80 по магистрали.
Цикл М1.

В первом такте по адресной шине выдаётся адрес ячейки памяти в которой хранится код команды, по шине данных выдаётся байт состояния. Выдача этих сигналов синхронизируется сигналом SYNC.
Во втором такте инициируется процессором чтение данных. Для этого формируется сигнал DBIN. Происходит проверка сигнала READY. Если процессор взаимодействует с медленным устройством, то сигнал READY отсутствует и процессор вставляет во временную диаграмму один или несколько тактов ожидания до появления сигнала READY (он проверяется только в начале такта). При выполнении тактов ожидания процессор формирует сигнал WAIT. В такте Т3 по заднему фронту DBIN процессор считывает код команды пришедший по шине Д0…Д7.
Последующие 1,2 или 3 такта процессор дешифрирует команду и выполняет её, если у него есть все необходимые данные.
Цикл чтения данных из ОЗУ или УВВ.
В первом такте выдаётся адрес и байт состояния, во втором такте инициируется чтение сигналом DBIN, в третьем такте процессор считывает данные по заднему фронту сигнала DBIN. Байт состояния указывает откуда будет считываться информация.
Циклы записи в память и записи в УВВ.
В первом такте читается байт состояния, во втором такте процессор выставляет данные, в третьем такте выдаётся сигнал записи WR.
Цикл прерывания.
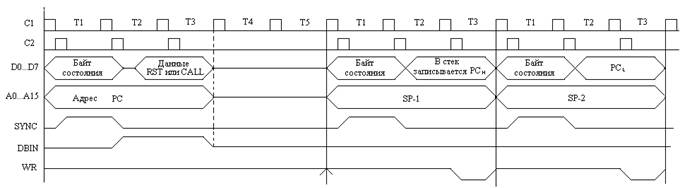
Весь обмен состоит из 3-х или 5 циклов. В первом цикле процессор вырабатывает сигнал INTA. В ответ на это устройство снимает сигнал INTR. В первом такте выдаётся байт состояния или адрес, а далее на шине Д0…Д7 то устройство, которое вызвало прерывание формирует код команды RST или код команды CALL. При коде команды CALL процессор формирует ещё 2 цикла чтения в которых устройство вызвавшее прерывание передаёт в процессор адрес подпрограммы обработки прерывания. На рисунке эти 2 цикла не показаны. В следующих 2-х циклах происходит запись в стек содержимого счётчика команд. процессор уменьшает на 1 содержимое указателя стека и выдаёт это значение по шине адреса. По шине данных в стек выдаётся старший байт счётчика команд. В следующем цикле содержимое указателя стека уменьшается ещё раз на 1. А в качестве данных выдаётся младший байт счётчика команд. После этого в счётчик команд заносится новое значение и начинается программа обработки прерывания.
Организация микропроцессорной системы на основе микропроцессора 580ВМ80.
Микропроцессор 1821ВМ85А. Отличия от микропроцессора 580ВМ80.
Данный микропроцессор является приемником микропроцессора 580ВМ80, поэтому в нём сохранены основные черты предшественника:
1. Разрядность шины адреса и данных.
2. Система команд.
Вместе с тем дальнейшее развитие технологии позволило повысить степень интеграции микросхем. Поэтому процессор серии 1821 полностью помещается в одной микросхеме. Кроме самого процессора в микросхеме разместились: схема задающего генератора, схема контроллера прерываний, системный контроллер и несколько более простых схем. Это позволяет на 3-х микросхемах создать работоспособную микроЭВМ с процессором, ОЗУ, ПЗУ и портами ввода вывода. Микропроцессор выполнен по КМОП технологии, но сигналы совместимы с ТТЛ уровнем. В схеме одно напряжение питания +5В.
 X1,X1 – входы для подключения кварца.
X1,X1 – входы для подключения кварца.
TRAP – немаскируемые прерывания в наивысшим приоритетом.
RST 7.5 – маскируемые прерывания.
RST 6.5 – маскируемые прерывания.
RST 5.5 – маскируемые прерывания.
Приоритет также понижается.
INTR – немаскируемые прерывания самого низкого уровня.
RESIN – вход начального сброса (аналоговый). Схема с резистором и конденсатором.
READY – сигнал готовности, поступает от медленно действующих устройств.
HOLD – сигнал запроса режима ПДП.
AD0…AD7 – совмещённая шина адреса и данных.
A7…A15 – шина адреса.
ALE – синхросигнал передачи адреса или синхросигнал начала цикла.
WR – синхросигнал записи данных.
RD – синхросигнал чтения данных.
IO/M – данный сигнал показывает с каким устройством ведётся обмен (или с УВВ(0) или с памятью(1)).
CLK – сигнал тактовой частоты.
RESET – выходной сигнал начального сброса.
INTA – сигнал подтверждения прерывания.
HLDA – сигнал подтверждения режима ПДП.
S0,S1 – сигналы состояния микропроцессора. Они показывают какую операцию выполняет микропроцессор в данном цикле.
SID - последовательный вход данных. По этому входу можно в последовательном коде вводить в микропроцессор информацию.
SOD – выходной последовательный сигнал. В последовательном коде можно выводить данные. Управление этим выходом осуществляется программно.
Максимальная тактовая частота в этом микропроцессоре повышена до 3МГц (в микропроцессоре 580ВМ80 она была 2МГц).
По сравнению с микропроцессором 580ВМ80 можно отметить следующие отличия:
1. Тактовый генератор помещён внутрь микропроцессора.
2. Схема начального сброса помещена также внутрь микропроцессора.
3. Вместо nМОП технологии использована КМОП (малое потребление, но при большой частоте потребление увеличивается и может обогнать ТТЛ).
4. Один источник питания.
5. Появилась развитая система прерываний.
6. Появились две новые команды SIM и RIM для работы в прерываниями.
7. Появились выводы последовательного ввода и последовательного вывода.
8. Совмещены шины адреса и данных. За счёт этого освободились 8 выводов.
9. состояние процессора определяется по сигналам S0 и S1 вместо байта состояния. Эти сигналы находятся на шине в течении всего цикла.
10. В регистре флагов признак С заменён на 3: С – признак переноса, V – признак переполнения, XS – признак потери значимости.
Циклы обмена.
Цикл М1 или цикл считывания кода команды.
В первом такте осуществляется выдача адреса и она сопровождается синхросигналом ALE. Во втором такте выдаётся сигнал RD и проверяется готовность устройство (READY). При отсутствии сигнала READY вставляется такт ожидания. В третьем такте происходит считывание кода команды или данных. Последующие один или два такта используются для дешифрации команды и её выполнения, если это возможно.
Цикл чтения.
Тот же цикл М1, только требует 3 такта.
Цикла записи.
 Цикл записи отличается только одним: вместо RD используется WR. Куда производится запись (чтение) в УВВ или в память определяется сигналом IO/M. Данный сигнал висит на шине в течении всего цикла обмена.
Цикл записи отличается только одним: вместо RD используется WR. Куда производится запись (чтение) в УВВ или в память определяется сигналом IO/M. Данный сигнал висит на шине в течении всего цикла обмена.
В данной серии есть также микросхема ПЗУ - 1821РУ55 и микросхема ОЗУ – 1821РФ10. На этих трёх микросхемах можно построить работающую машину.
Обработка прерываний микропроцессором 1821ВМ85А. Команды SIM и RIM.
TRAP – это немаскируемые прерывания наивысшего приоритета. Активный уровень – высокий. Это значит, что по 1 процессор будет обрабатывать сигнал. От данного прерывания замаскироваться не возможно, поэтому данный вход обычно используется для обработки фатальных ситуаций. Пример: выключение питания. Подпрограмма обработки прерываний располагается по строго определённому адресу – 24h.
RST 7.5 – маскируемые прерывания более низкого уровня. Прерывание обрабатывается и по фронту и по высокому уровню. При появлении переднего фронта сигнала RST 7.5 он фиксируется во внутреннем триггере микропроцессора, поэтому сигнал RST 7.5 будет обрабатываться микропроцессом даже если входной сигнал уже снят.
RST 6.5 – маскируемые прерывания ещё более низкого уровня по сравнению с RST 7.5. Обрабатываются по высокому уровню.
RST 5.5 - маскируемые прерывания ещё более низкого уровня по сравнению с RST 6.5.
Для всех этих прерываний программы обработки располагаются в строго определённом месте.
| RST | ||
| TRAP | |
| RST 6.5 | |
| 002С | RST 5.5 |
| 003С | RST 7.5 |
Располагаются посередине программных прерываний. В 4-х отведённых байтах записывается:EI(разрешение прерываний); JMP адрес.
Наряду с командами EI и DI, которые разрешают или запрещают сразу все маскируемые прерывания в данном микропроцессоре появляются две новых команды SIM и RIM, которые управляют каждым из маскируемых прерываний по отдельности. Кроме этого данные команды управляют последовательным вводом и выводом.
Перед выполнение команды SIM в А должна быть записана следующая информация:

0,1,2 – Маски прерываний RST 5.5, RST 6.5, RST 7.5.
3 – Разрешение установки масок.
4 – Сброс триггера RST 7.5
5 – Не используется
6 – Разрешение SOD.
7 – SOD (микропроцессора).
После выполнения команды RIM А содержит следующую информацию:
0,1,2 – Маски.
3 – EI/DI
4,5,6 - Состояния входов RST 5.5, RST 6.5, RST 7.5.
7 – SID – показывает что было на выводе SID микропроцессора.
Построение разрядно-модульных микропроцессоров.
Внутри микропроцессора можно выделить 4 более менее разделённых части:
1. Операционная часть (вычисляет).
2. Управляющая часть (управляет).
3. Интерфейсная часть – отвечает за связь с внешним миром.
Если микропроцессор не помещается в одной микросхеме, то его размещают в нескольких микросхемах, разделяя на части таким образом, чтобы между этими частями было наименьшее количество связей.
Существует 2 вида деления:
1. В результате горизонтального деления получаются многокристальные микропроцессоры.
2. Деление по разрядам (вертикальные линии). В результате такого деления получаются разрядно-модульные микропроцессоры.
В большинстве случаев приходится использовать оба деления одновременно.
Использование разрядно-модульной структуры позволяет осуществлять выбор разрядности микропроцессора кратной некоторой базовой разрядности.
Появляется возможность замены одной или нескольких ИС хранящих микропрограммы. При этом микропроцессор начинает работать с другой системой команд, т.е. он настроен на другие классы задач.
 Микропрограммы хранятся в ПЗУ, поэтому смена системы команд практически сводится к замене одних БИС ПЗУ на другие.
Микропрограммы хранятся в ПЗУ, поэтому смена системы команд практически сводится к замене одних БИС ПЗУ на другие.
При разработке разрядно-модульных и многокристальных микропроцессоров разработчик вынужден решать некоторые специфичные проектные задачи для создания оптимально функционирующей микропроцессорной системы:
1. Приходится осуществлять выбор структуры управления микропроцессором.
2. Разработчику приходится разделять функции между программными и аппаратными средствами.
3. Необходимо осуществлять выбор формата и способа кодирования микрокоманд.
4. Приходится определять способы задания адресов и организацию переходов в микропрограмме.
Рассмотрим типичную структурную схему многокристального микропроцессора:
 УБ – управляющий блок.
УБ – управляющий блок.
ФАМ – формирователь адреса микрокоманды.
МПП – микропрограммная память.
РгМК – регистр микрокоманд.
БОД – блок обработки данных.
Микропроцессор состоит из двух частей:
1. Блока обработки данных, выполняющего все вычислительные операции.
2. Из управляющего блока.
Алгоритм задачи записан в виде программы в ЗУ. Программа выполняется последовательно команда за командой. Первоначально команда запоминается в регистре команд. Далее она реализуется в виде последовательности микрокоманд, называемой микропрограммой (каждая команда – это микропрограмма). В зависимости от кода команды дешифратор адреса вычисляет первоначальный адрес микропрограммы выполняющей данную команду. Этот адрес через ФАМ поступает в МПП. В ответ на поступающий адрес микропрограммная память выдаёт код микрокоманды, которая запоминается в регистре микрокоманд. Разряды микрокоманды управляют дальнейшим процессом вычислений. Обычно каждый разряд микрокоманды управляет какой-то одной цепью. Типичная микрокоманда содержит от 40 до 120 разрядов. Разряды микрокоманды управляют:
1. Последовательностью вычислений.
2. Формированием адреса следующей микрокоманды.
3. Формированием управляющих сигналов в МУ.
БОД производит вычисления, а также формирует адреса команд, выполняемых программой. В высокопроизводительных ВС ФАМ выносится в виде отдельного блока. Кроме самих вычислений БОД формирует признаки выполнения микрокоманд, которые поступают на ФАМ и влияют на последовательность выполнения микрокоманд. Управляющая часть микропроцессора является более консервативной. Она раже меняет свою структуру в различных реализациях ЭВМ.
Последовательность выполняемых микроопераций определяющая систему команд хранится в МПП.
Микропроцессорная секция 1804ВС1.
Микропроцессорная секция 1804ВС1 представляет собой 4-х разрядную секцию на основе которой создаются блоки обработки данных.
Микропроцессорная секция содержит:
1. РЗУ – регистровое запоминающее устройство. Оно содержит 16 4-х разрядных ячеек. К данному ЗУ можно одновременно обращаться по 2-м адресам: А и В. На выходе формируется содержимое ячеек.
2. Регистры РгQ, РгА и РгВ предназначены для временного хранения данных.
3. СИД – селектор исходных данных. Основная функция: он выбирает из 4-х источников 2 операнда которые будут обрабатываться в АЛУ.
4. АЛУ – арифметико-логическое устройство выполняет арифметические и логические операции. При этом формируются признаки: Z – признак нуля, F3 – признак знака, OVR – признак переполнения, C4 – признак переноса, P и G - разряды переноса предназначенные для организации (осуществления) группового переноса.
5. СВД – селектор выходных данных. Выдаёт или не выдаёт данных на выходную шину Y. Его работой управляет сигнал ОЕ.
6. Сдвигатели F и Q осуществляют операции сдвига.
Работой секции управляют сигналы I0…I8. Обычно исходные данные берутся из РЗУ. С выхода РЗУ данные через регистры А и В попадают на СИД. СИД осуществляет выборку 2-х источников данных из 4-х возможных входных сигналов. Кроме того он может в качестве одного из операндов взять 0. АЛУ выполняет 8 различных операций: 3 арифметические (1 операция сложения и 2 операции вычитания (R-S/S-R)) и 5 логических (и, или, сложение по модулю 2, инверсия одного из операндов). Результат через СВД выдаётся на шину Y, а также по обратной связи поступает на сдвигатели F и Q. Сдвигатели осуществляют операцию сдвига на один разряд вправо и влево, а могут и не делать сдвига. После этого результат вновь попадает в СИД или в РЗУ. Для организации многоразрядных микропроцессоров необходимо, чтобы операции сдвига переходили из одной секции в другую. Для этого служат сигналы PRO,PR3,PQ0,PQ3. Для арифметических операций необходим перенос из более младшей секции. Данная микропроцессорная секция позволяет наращивать разрядность микропроцессора по 4 разряда.
Микросхема ускоренного переноса 1804ВР1.
 Микросхема предназначена для организации ускоренного переноса при построении многоразрядных микропроцессоров на микропроцессорных секциях ВС1 и ВС2. Одна микросхема ВР1 обеспечивает ускоренный перенос для 4-х микропроцессорных секций. Для большей разрядности микропроцессора используют каскадное включение микросхем ВР1. Микросхема ВР1 формирует сигналы переноса по правилам группового переноса и представляет из себя чисто логическую схему.
Микросхема предназначена для организации ускоренного переноса при построении многоразрядных микропроцессоров на микропроцессорных секциях ВС1 и ВС2. Одна микросхема ВР1 обеспечивает ускоренный перенос для 4-х микропроцессорных секций. Для большей разрядности микропроцессора используют каскадное включение микросхем ВР1. Микросхема ВР1 формирует сигналы переноса по правилам группового переноса и представляет из себя чисто логическую схему.
Построение многоразрядных арифметических устройств на микросхемах серии 1804.
1.Схема 12-ти разрядного устройства с последовательным переносом.
Для того, чтобы создать 12-ти разрядное устройство потребуется 3 микросхемы ВС1.
Недостаток: перенос осуществляется последовательно, в результате схема работает медленно.
2.16-ти разрядное арифметическое устройство с ускоренным переносом.
Потребуется 4 микросхемы ВС1.
3. 32-х разрядное устройство с ускоренным переносом.
Применение микропроцессоров для построения систем цифровой обработки сигналов (ЦОС).
Существует обширная область применения микропроцессоров называемая цифровой обработкой сигналов, которая имеет свои особенности, позволяющие рассматривать её как самостоятельную область. Основными в ЦОС являются следующие направления:
1. Обработка звуковых сигналов. Данная область включает в себя прежде всего фильтрацию, спектральный анализ, корреляционный анализ, обратную свёртку, а также алгоритмы предсказания сигналов. Требуемая производительность для звуковых сигналов от 0,5МГц до 5МГц. Объём выборки в районе 250 слов и разрядность до 16 разрядов.
2. Обработка изображений. Цель обработки – это улучшение качества изображения, а также сжатие информации для последующего хранения и передачи по каналам связи. Данная обработка использует алгоритмы фильтрации, вычисления свёртки, быстрого преобразования Фурье, преобразования Адамара, преобразования Уолта. От системы требуется производительность порядка 109-1012 операций в секунду. Объём выборки до 1 миллиона слов. Требуемая разрядность – не превосходит 8 разрядов.
3. Системы радиолокации. Основная используемая операция – это фильтрация. При этом большинство операций выполняется на высокой частоте порядка 10ГГц. Пока это область недостижима для современной вычислительной техники. Вычислительная техника используется в системах радиолокации для обработки более низкочастотных сигналов. В этом случае требуется быстродействие порядка 109 операций в секунду, объём выборки порядка 1000 слов и разрядность до 32 разрядов.
4. Гидролокация. Решаются те же задачи, что и в радиолокации но на более низкой частоте (сотни кГц). Гидролокации требуется выполнение операций свёртки, быстрого преобразования Фурье, умножения матриц, решения систем линейных уравнений. Максимальная производительность 108 операций в секунду. Размер выборки порядка 1000 слов и разрядность от 16 до 32 разрядов.
Т.о. анализ систем ЦОС показывает, что применение микропроцессоров в этой области возможно, однако необходимое быстродействие в случае обработки высокочастотных сигналов может быть достигнуто за счёт распараллеливания вычислений и введения конвейерной обработки данных.
Применение цифровых методов обработки даёт следующие преимущества:
1. Воспроизводимость. Исправная система ЦОС имеет одинаковые параметры и не требует настройки.
2. Параметры систем ЦОС не изменяются во времени и при изменении температуры.
3. Отсутствуют паразитные связи, свойственные аналоговым системам.
4.  Возможны решения принципиально недостижимые для аналоговой техники. Пример: колебательный контур с высокой добротностью. В данном аналоговом контуре на индуктивности и на конденсаторе имеются паразитные ёмкости, поэтому добротность в лучшем случае будет равняться 100, а в цифровой техники достаточно решить уравнение второго порядка, и если добиться того, чтобы второй член этого уравнения стал равен 0, то добротность увеличивается до бесконечности.
Возможны решения принципиально недостижимые для аналоговой техники. Пример: колебательный контур с высокой добротностью. В данном аналоговом контуре на индуктивности и на конденсаторе имеются паразитные ёмкости, поэтому добротность в лучшем случае будет равняться 100, а в цифровой техники достаточно решить уравнение второго порядка, и если добиться того, чтобы второй член этого уравнения стал равен 0, то добротность увеличивается до бесконечности.
5. Унификация элементной базы.
Анализ показывает, что большинство алгоритмов используемых при ЦОС основано на небольшом количестве операций, которые должен выполнять микропроцессор.
| № | Тип операции | Тип данных | Разрядность |
Весовое суммирование 
| Вещественные, комплексные. | 8:8, 8:16, 16:16, 16:32. | |
Свёртка 
| Вещественные, комплексные. | 8:8, 8:16, 16:16, 16:32. | |
Набор множителей 
| Вещественные, комплексные. | 8:8, 8:16, 16:16, 16:32. | |
Не рекурсивный фильтр 1-ого порядка 
| Вещественные | 16:16, 32:32. | |
Не рекурсивный фильтр 2-ого порядка 
| Вещественные | 16:16, 32:32. | |
Рекурсивный фильтр 1-ого порядка 
| Вещественные | 16:16, 32:32. | |
Рекурсивный фильтр 2-ого порядка 
| Вещественные | 16:16, 32:32. | |
Биквадратное звено 
| Вещественные | 16:16, 32:32. | |
| «Бабочка» 1-ого типа Е=А+В*С; D=А-В*С; | Комплексный | 8:8, 16:16. | |
| «Бабочка» 2-ого типа Е=(А+В)*С; D=А-В; | Комплексный | 8:8, 16:16. |
Данный набор микроопераций позволяет сравнительно легко реализовывать боле сложные функции, такие как фильтры любого порядка, умножение матриц, быстрое преобразование Фурье, дискретное преобразование Фурье и т.д. Анализ формул показывает, что в большинстве случаев базовой является операция: А*В+С. Разрядность операндов является переменной и равна 8, 16 или 32. Кроме базовой операции при ЦОС довольно часто встречаются операции сложения, сложения с накоплением, очереди сдвига с параллельным чтением операндов и т.д. Данный набор операций определил функциональный состав микросхем серии 1815.
Микропроцессорный комплект БИС 1815 для конвейерных систем ЦОС.
Известные цифровые БИС, применяемые для построения систем ЦОС можно разделить на следующие классы:
1. Микропроцессорные БИС общего назначения с внешними схемами АЦП и ЦАП. Для повышения их быстродействия в состав систем вводятся сопроцессоры.
2. Однокристальные микроЭВМ со встроенными схемами АЦП и ЦАП. Пример: серия 1813. Особенность данных микроЭВМ заключается в том, что они не содержат специальных команд для выполнения функции ЦОС.
3. Специализированные БИС для систем ЦОС.
Первые 2 варианта отличаются аппаратной избыточностью, т.к. многие из операций заложенных в них не используются в системах ЦОС. Данные варианты не обеспечивают оптимальное быстродействие, поэтому их применение ограничено низкочастотными сигналами.
Специализированные БИС должны обладать микропрограммным управлением для повышения скорости обработки информации. Микропрограммное управление позволяет избавиться от дешифрации команд, требующих значительных затрат времени. Также с целью повышения быстродействия микросхемы комплекта БИС для ЦОС должны быть ориентированы на конвейерную обработку сигналов. В целью снижения себестоимости микросхем комплект должен содержать малое количество типов микросхем. Применимость данных микросхем за пределами области ЦОС проблематична, поэтому серийность их выпуска имеет большое значение.
При обработке информации возможно параллельное или последовательное представление информации. При параллельном представлении информации обработка происходит наиболее быстро, но обрабатывающее устройство имеет сложную структуру. Для параллельных устройств остро стоит вопрос об изменении разрядности операндов.
Устройства с последовательной обработкой наиболее просты, но не обладают достаточным быстродействием.
В микропроцессорном комплекте БИС 1815 был выбран последовательно-параллельный метод обработки. Данные обрабатываются по 2-м разрядам за такт. В состав серии входят 7 микросхем:
1815ВФ1 – универсальный процессорный элемент предназначенный для работы в основном с вещественными числами.
1815ИМ1 – 16-ти разрядный сумматор последовательных чисел.
1815ИР1 – БИС ортогональной памяти.
1815ПР1 – микросхема преобразования кодов.
1815ВФ2 – накапливающий сумматор.
1815ВФ3 – микропроцессор являющийся основой схем быстрого преобразования Фурье. Предназначен для работы с комплексными числами.
1815ИА1 – АЛУ.
Универсальный процессорный элемент 1815ВФ1.
Микросхема предназначена для выполнения базовой операции системы ЦОС. Она работает в 2-х режимах определяемых управляющим сигналом МО1.
В первом режиме она выполняет операцию С1=А1В1+А2В2. Числа (входные операнды) А1, А2, В1, В2 являются 8-ми разрядными числами. Они подаются на вход схемы в параллельно последовательном коде по 2 разряда за такт младшими разрядами вперёд. Результат С1 является 16-ти разрядным числом.
Во втором режиме схема выполняет операцию С=А*В. При этом исходные операнды 16-ти разрядные, результат 32 разрядный.
Первой выполняемой операцией является умножение. Проще всего она реализуется в прямом коде, поэтому входные операнды представлены в прямом коде. После этого выполняется операция сложения, которая проще реализуется в дополнительном коде. В этом случае знаковый разряд обрабатывается также как и остальные разряды, поэтому входные данные представлены в модифицированном дополнительном коде. Предполагается, что исходные операнды и результат являются правильной дробью, т.е. меньше 1.
В первом режиме возможно переполнение при выполнении операции сложения. Схема построена таким образом, что после сложения производится сдвиг результата на один разряд в сторону младших разрядов, чтобы избежать переполнения. Это делается всегда в первом режиме. Во втором режиме переполнение принципиально невозможно, поэтому сдвиг не производится.
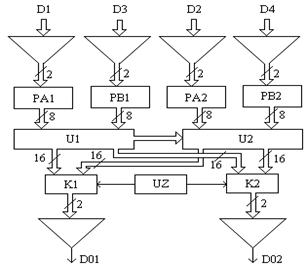
Внутренняя часть микросхемы выполнена по И2Л технологии. У этой технологии большое быстродействие и меньшее тепловыделение. Имеется один источник питания: 3В. На входе и выходу микросхемы установлены буферные усилители (показаны треугольниками), которые преобразуют внутренние сигналы к ТТЛ уровням. Входные данные через буферные схемы попадают в 4 регистра РА1, РВ1, РА2, РВ2. Здесь происходит их накопление до 8-ми разрядов. Блоки U1 и U2 производят математическую обработку в соответствии с формулами: С1=А1В1+А2В2, С=А*В.
UZ – блок занимающийся обработкой знаков. После обработки информация попадает на коммутаторы К1 и К2. В результате выполнения операции умножения количество разрядов в произведении становится вдвое больше по сравнению с исходными числами. Чтобы выводить результат с вдвое большим количеством разрядов при той же тактовой частоте в схеме используется 2 выхода. Нечётные слова поступают на первый выход, чётные слова на второй. Блок UZ переводит информацию в дополнительный код, если результат отрицательный, а также добавляет знаковые разряды.
При работе во втором режиме регистры РА1 и РА2 сцепляются между собой. Также сцепляются РВ1 и РВ2. Зачёт этого получаются исходные 16-ти разрядные операнды. Вход управления МО2 позволяет производить операции с фиксированным первым операндом. Включение этого режима обеспечивает умножение на постоянный коэффициент (РА1, РА2 – постоянные коэффициенты (данные на этом входе не изменяются), РВ1 и РВ2 – числа, которые меняются). Вся информация продвигается по схеме по тактовым сигналам SYN. Сигнал CSI является синхронизирующим для передачи знаковых разрядов. SR – сигнал начального сброса.
В первом режиме сигнал на выходе получается с задержкой на 10 тактов, а во втором с задержкой на 9 тактов.

Максимальная тактовая частота составляет 8,5 МГц.
Сумматор последовательных числе 1815ИМ1.
Микросхема ИМ1 осуществляет суммирование до 8-ми слов неограниченной длины, представленных в модифицированном дополнительном коде, т.е. сигналов поступающих с выхода микросхемы ВФ1. Суммирование слов неограниченной длины становится возможным из-за применения дополнительного кода, в котором знаковый разряд обрабатывается также, кок и цифровые разряды.
 Схема содержит 7 сумматоров, объединённых в 3 ступени. Каждый сумматор является 2-х входовым, 2-х разрядным устройством. Все сумматоры имеют одинаковую схему. Обработка информации производится по тактовым сигналам SYN. Сигналы CSI синхронизируют передачу знаковых разрядов. Предполагается, что входная и выходная информация является числами с фиксированной запятой меньшими 1. При сложении нескольких чисел возможно переполнение. Чтобы этого не происходило в схеме производится автоматической выравнивание чисел на 2 или 3 разряда. Переключением между выравниванием на 2 или 3 разряда управляет сигнал МО. При выравнивании происходит сдвиг чисел на 2 или 3 разряда в сторону младших разрядов. Это выравнивание необходимо учитывать при ручном масштабировании результатов. Т.е. схема работает с числами как с правильными дробями, т.е. меньшими 1.
Схема содержит 7 сумматоров, объединённых в 3 ступени. Каждый сумматор является 2-х входовым, 2-х разрядным устройством. Все сумматоры имеют одинаковую схему. Обработка информации производится по тактовым сигналам SYN. Сигналы CSI синхронизируют передачу знаковых разрядов. Предполагается, что входная и выходная информация является числами с фиксированной запятой меньшими 1. При сложении нескольких чисел возможно переполнение. Чтобы этого не происходило в схеме производится автоматической выравнивание чисел на 2 или 3 разряда. Переключением между выравниванием на 2 или 3 разряда управляет сигнал МО. При выравнивании происходит сдвиг чисел на 2 или 3 разряда в сторону младших разрядов. Это выравнивание необходимо учитывать при ручном масштабировании результатов. Т.е. схема работает с числами как с правильными дробями, т.е. меньшими 1.
Режим со сдвигом на 2 разряда используется в том случае, когда количество входным операндов меньше или равно 4. При сдвиге на 3 разряда результат выдаётся с одним знаковым разрядом при сдвиге на 2 разряда результат выдаётся в двумя знаковыми разрядами.
На выходе DO1 всегда выдаются нечётные разряды, а на DO2 – чётные. Чтобы выполнялось данное правило как при выравнивании на 2 разряда, так и при выравнивании на 3 разряда в схему введён мультиплексор, которые осуществляет переключение разрядов между выходными шинами. Схема имеет задержку между входными и выходными данными на 8 тактов.
БИС ортогональной регистровой памяти 1815ИР1.
Микросхема регистровой памяти представляет из себя матрицу памяти размером 8х4 или 4х8 и предназначена для задержки информации обрабатываемой микросхемами ВФ1 и ИМ1.
Информация продвигается вдоль регистров по тактам синхронизации SYN. Сигнал МО определяет направление передвижения. Схема имеет возможность обрабатывать 4-х разрядные и 8-ми разрядные слова. При этом в первом случае задержка составляет 8 тактов, во втором 4 такта. Основное назначение микросхемы – это задержка отсчётов 8-ми, 16 или 32-х разрядных слов в системе ЦОС построенных на микросхемах серии 1814. Микросхема выполнена по ТТЛШ технологии и имеет напряжение питания +5В.
Цифровая фильтрация на микропроцессорном комплекте 1815.
Математическая работа цифрового фильтра описывается разностным уравнением:  х – это отсчёты выходной переменной, аi и bj – весовые коэффициенты, именно они определяют свойства фильтра. Если все bj=0, то фильтр называется не рекурсивным. В противном случае – рекурсивный фильтр (фильтр без памяти). Т – это период выборки входного сигнала, n – это размер выборки. Для функции y введём понятие z преобразования:
х – это отсчёты выходной переменной, аi и bj – весовые коэффициенты, именно они определяют свойства фильтра. Если все bj=0, то фильтр называется не рекурсивным. В противном случае – рекурсивный фильтр (фильтр без памяти). Т – это период выборки входного сигнала, n – это размер выборки. Для функции y введём понятие z преобразования:  Точно также можно ввести это понятие для х:
Точно также можно ввести это понятие для х: 
Передаточная функция фильтра – это отношение z преобразования выходной величины к z преобразованию входной величины.  Данная передаточная функция – это передаточная функция рекурсивного фильтра.
Данная передаточная функция – это передаточная функция рекурсивного фильтра.
У не рекурсивного фильтра:  (все bj=0, отсюда знаменатель равен 1). Умножение на z-1 эквивалентно задержке на один отсчёт. Передаточные функции фильтров не зависят от формы входных и выходных сигналов.
(все bj=0, отсюда знаменатель равен 1). Умножение на z-1 эквивалентно задержке на один отсчёт. Передаточные функции фильтров не зависят от формы входных и выходных сигналов.
Возможны 3 способа реализации цифровых фильтров:
1. Прямой.
2. Каскадный или последовательный.
3. Параллельный.
 Прямая структура рекурсивного фильтра использует выражение (**).
Прямая структура рекурсивного фильтра использует выражение (**).
У не рекурсивного фильтра будет отсутствовать обратная связь. Возможно сокращение числа элементов задержки, если в приведённой схеме одни и те же элементы задержки z-1 использовать как для задержки отсчётов х, так и для задержки отсчётов у.
Съема рекурсивного фильтра в канонической форме.
В данном фильтре сократилось число элементов задержки. Вместо общего сумматора сумматор стал распределённым.
2.Каскадная форма получается, если полиномы располагающиеся в числителе и знаменателе представить через их корни.  Но т.к. корни могут быть комплексными, то будем представлять в виде:
Но т.к. корни могут быть комплексными, то будем представлять в виде: 
 Данная схема реализуется последовательным включением звеньев с характеристикой
Данная схема реализуется последовательным включением звеньев с характеристикой  HK(p) – описывает передаточную функцию биквадратного звена.
HK(p) – описывает передаточную функцию биквадратного звена.
3.Параллельная структура. преобразуем уравнения (2) и (3) к виду: 
 1, 2, …L2 – биквадратные звенья.
1, 2, …L2 – биквадратные звенья.
Проанализируем прямую схему. Операция умножения на постоянные коэффициенты аi и bi в серии 1815 реализуется на микросхеме ВФ1. В случае 8-ми разрядных входных данных на этой же микросхеме производится и частичное суммирование. Суммирование осуществляется микросхемой ИМ1. Элементы задержки реализуются на регистровой схеме ИР1.
Пример: реализуем не рекурсивный фильтр 7-ого порядка. Будем считать, что входные данные 8-ми разрядные.


Микропроцессор 1815 ВФ3.
Микропроцессор ВФ3 имеет 2 особенности, делающие его несовместимым с остальными микросхемами данной серии:
1. Информация обрабатывается данным микропроцессором представлена в знакоразрядной форме.
2. Микропроцессор ведёт обработку дынных старшими разрядами вперёд.
Информация в микропроцессоре описывается троичным кодом: Xi={1,0, }. Такое описание позволяет обойтись без знакового разряда. Однако код имеет избыточность, т.е. одно и то же слово можно представить несколькими способами. Например: Х=1=01. Код является позиционным. Чтобы обойти неоднозначность описания слов принято ограничение при котором положительные числа описываются цифрами 0 и 1, о отрицательные числа описываются с помощью цифр 0 и . Т.е. если Х=+0,0101=0,0101. Х=-0,0101=0,00. Каждый разряд в микропроцессоре передаётся по 2-м шинам: положительной и отрицательной. Запятая в микропроцессоре выполняет роль маркера разделяющего слова и передаётся уровнем 1 по обоим шинам.
}. Такое описание позволяет обойтись без знакового разряда. Однако код имеет избыточность, т.е. одно и то же слово можно представить несколькими способами. Например: Х=1=01. Код является позиционным. Чтобы обойти неоднозначность описания слов принято ограничение при котором положительные числа описываются цифрами 0 и 1, о отрицательные числа описываются с помощью цифр 0 и . Т.е. если Х=+0,0101=0,0101. Х=-0,0101=0,00. Каждый разряд в микропроцессоре передаётся по 2-м шинам: положительной и отрицательной. Запятая в микропроцессоре выполняет роль маркера разделяющего слова и передаётся уровнем 1 по обоим шинам.
| D+ | D- | |
|
| ||
| Знак |
Обработка начиная со старших разрядов обусловлена тем, что при этом проще выполняются некоторые операции характерные для систем ЦОС. Часто обработка начинается не дожидаясь прихода всех разрядов числа.
Микросхема выполняет одновременно 2 операции:
1. S=A*B;
2. P=(C D)G;
D)G;
Под * понимается операция сложение, вычитание, взятие модуля числа и сравнение чисел.
Шина COD 0…5 – шина выбора режима. По этим проводам микросхема настраивается на выполнение определённых операций.
CWR – синхросигнал для записи кода.
DA, DB, DC, DD, DG – шины входных данных.
SYN – синхросигнал для ввода данных.
DS – выходная шина первой операции.
DP – выходная шина результата второй операции.
Входные переменные А и В записываются в одноразрядные регистры RA и RB. Назначение этих регистров – это привязка данных А и В к тактовым сигналам. После этого входные данные поступают на АЛУ. АЛУ выполняет операцию закодированную разрядами COD. Это могут быть операции сложения, вычитания, сложения и вычитания со взятием модуля, а также операция сравнения, в результате выполнения которой на выход выдаётся большее из двух чисел А и В. В результате операции сложения может произойти переполнение, т.е. микросхема работает с числами меньше 1, т.е. с правильными дробями. Установкой определённых разрядов кода можно заставить микросхему сдвигать результат на один разряд в сторону младших разрядов или не делать этого. Во втором случае за корректность результата отвечает разработчик. Следом за АЛУ установлены две схемы (регистра) задержки. Они предназначены для задержки выходного сигнала с целью выравнивания задержек в схеме сложения и в схеме умножения. С выходов АЛУ и элементов задержки результат попадает на одноразрядный регистр результата RS. В зависимости от разрядов COD регистр RS запоминает одно из трёх значений.
Два входных числа C и D поступают на одноразрядные регистры RC и RD, которые осуществляют привязку этих чисел к синхросигналу. Сумматор SM выполняет операцию сложения или вычитания в зависимости от разрядов COD. Входное число G поступает на 4-х разрядный регистр RG. ОН осуществляет задержку таким образом, чтобы сигнал на его выходе появлялся одновременно с выходом сигнала на сумматоре SM.
Схема умножения MPL выполняет операцию умножения в соответствии с уравнением. Результат запоминается на одноразрядном регистре RP. На сумматоре возможно переполнение, поэтому если необходимо, то производится масштабирование результата суммирования при помощи разрядов COD.(при????).
На схеме сумматора при отсутствии выравнивания результата, результат на выходе появляется с дисперсностью равной 3-м тактам.
Если схема суммирования производит выравнивание сигналов, то задержка выходного сигнала кратна двум тактам.
Вторая схема, которая выполняет умножение также задерживает выходной сигнал и его задержка зависит от наличия или отсутствия выравнивания. При отсутствии выравнивания задержка производится на 6 тактов:
При наличии выравнивания задержка происходит на 4 такта:
Микросхема выполнена по И2Л технологии и имеет напряжение питания от 1,5 до 5В.
Особенности реализации систем ЦОС на БИС 1815ВФ3.
Основной алгоритм линейной обработки цифровой информации в системах ЦОС может быть описан уравнением: Y=W*X, где
Х – вектор входных воздействий, представляющих собой или комплексные переменные или их квадратурные составляющие;
Y – это вектор выходных переменных, представленных таким же образом;
W – это матрица комплексных весовых коэффициентов.
A=ReA+jImA; A=|A|ej ;
;
Коэффициенты матрицы W представляют собой передаточные функции цифровых фильтров, задаваемых обычно в виде отношения полиномов к z плоскости.
 Точно также, как и ранее мы можем представить передаточную функцию H(z) в виде трёх различных форм:
Точно также, как и ранее мы можем представить передаточную функцию H(z) в виде трёх различных форм:
1. Прямая структура.
2. Параллельная структура.
3. Последовательная структура.
Для реализации Hij(z) необходимо уметь реализовать схему фильтра первого порядка. А схемы фильтров более высоких порядков получатся из них путём параллельного или последовательного включения простейших фильтров. Элементарный рекурсивных фильтр первого порядка описывается передаточной функцией вида:  Параметры с индексом 0, т.е. r0 и 0 - это амплитуда и фазовый сдвиг нуля передаточной функции. Если
Параметры с индексом 0, т.е. r0 и 0 - это амплитуда и фазовый сдвиг нуля передаточной функции. Если , то H(z)=0. Параметры с индексом p, т.е. rp и p - это амплитуда и фазовый сдвиг полюса передаточной функции. Если
, то H(z)=0. Параметры с индексом p, т.е. rp и p - это амплитуда и фазовый сдвиг полюса передаточной функции. Если , то H(z)=
, то H(z)= .
.
 Схема простейшего фильтра содержит сумматоры, схемы умножения и элемент задержки. Задержка будет осуществляться с использованием микросхемы ИР1, а сложение и умножение необходимо выполнить на микросхеме ВФ3. При этом надо учитывать, что в общем случае переменные являются комплексными числами.
Схема простейшего фильтра содержит сумматоры, схемы умножения и элемент задержки. Задержка будет осуществляться с использованием микросхемы ИР1, а сложение и умножение необходимо выполнить на микросхеме ВФ3. При этом надо учитывать, что в общем случае переменные являются комплексными числами.
Предположим, что надо сложить: 
 ReZ=ReX+ReY;
ReZ=ReX+ReY;
 ImZ=ImX+ImY;
ImZ=ImX+ImY;

W=UV;
W=ReW+jImW;
U=ReU+jImU;
V=ReV+jImV;
ReW+jImW=(ReU+jImU)(ReV+jImV)=ReUReV+jImUReV+jReUImV-ImUImV;
ReW=ReUReV-ImUImV;
ImW=ImUReV+ReUImV;
Для вычитания схема настраивается.
Количество схем можно сократить до 3-х, если введём следующие преобразования:
ReW= ReUReV -ImUImV+ReUInV- ReUInV;
ImW= ImUReV +ReUImV+ ImUImV -ImUImV;
ReW=ReU(ReV-ImV)+ ImV(ReV-ImU);
ImW= ImV(ReU-ImU) +ImU(ReV+ImV);
Уравнение для нерекурсивного фильтра выглядит следующим образом: 
При формировании отсчёта xn-1 необходимо задержать xn на длину одного слова. Для этого вводится элемент задержки. Однако необходимо учесть, что часть необходимой задержки получается за счёт прохождения отсчётом xn-1 схемы умножения. Реальный элемент задержки осуществляет задержку на длину отсчёта минус задерж
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 1427; Нарушение авторских прав?; Мы поможем в написании вашей работы!