КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Виды автоматических систем регулирования и их основные свойства
|
|
|
|
Для обеспечения нормального хода технологических процессов пищевой промышленности применяются автоматические системы различных видов. Однако одними средствами автоматического контроля, даже самыми совершенными, обеспечить нормальное протекание этих процессов невозможно. Для этого необходимы еще сложные автоматические устройства - системы автоматического регулирования, которые бы справились с задачей без участия человека. Для изучения вопросов, связанных с теорией автоматического регулирования, необходимо знать некоторые основные термины и понятия, которые приведены ниже.
Алгоритм - система правил, следуя которой можно разрешить определенную математическую задачу, производя необходимые операции в строго установленной последовательности. Различают алгоритмы функционирования и управления. Алгоритм функционирования - совокупность предписаний, ведущих к правильному выполнению технологического процесса. Алгоритм управления - совокупность предписаний, определяющих характер воздействия на управляемый объект при выполнении им алгоритма функционирования.
Управление - процесс осуществления воздействий, соответствующих алгоритму управления. Автоматическое регулирование можно рассматривать как разновидность автоматического управления. Регулируемый параметр - физическая величина, которую требуется поддерживать постоянной или изменять по определенному закону (температура, давление). Значение регулируемого параметра, которое необходимо поддерживать в процессе регулирования, называют заданным значением, значение его в каждый момент времени - текущим значением, а разность между заданным и текущим значением регулируемого параметра - рассогласованием, или ошибкой.
|
|
|
Автоматическое устройство управления - устройство, воздействующее на объект без непосредственного участия человека в соответствии с алгоритмом управления. Большая группа таких устройств называется автоматическими регуляторами. Существует много разнообразных типов регуляторов, однако все они представляют собой совокупность элементов, выполняющих определенные функции. Автоматическая система регулирования (АСР) - совокупность объекта регулирования и автоматического регулятора.
Возмущения - различные факторы, случайные по своей природе, которые нельзя заранее предусмотреть, вызывающие изменения технологического режима. К ним относятся, например, случайные изменения состава сырья, притока и расхода вещества, температуры теплоносителя, характеристик технологического оборудования. Всякая автоматическая система регулирования может быть представлена как совокупность элементарных звеньев, связанных в определенную структурную схему. Структурные схемы позволяют наглядно представить взаимодействие элементов и распространение сигналов в цепи автоматической системы регулирования. Элементы, входящие в схему типовой АСР, выполняют определенные функции в зависимости от назначения и места включения в цепь регулирования (рис. 4.1).
Измерительный преобразователь 1 производит непрерывное измерение текущего значения регулируемой величины ср в объекте I, который испытывает возмущающие воздействия К, и преобразует эту величину в сигнал е. Задающее устройство 3 выдает сигнал р, соответствующий заданному значению регулируемого параметра. Устройство 2 сравнивает сигналы от измерительного преобразователя и задающего устройства и в случае их различия (если текущее значение регулируемого параметра не равно заданному) выдает сигнал рассогласования б на управляющее устройство 4. Это устройство преобразует (в случае необходимости усиливает) сигнал рассогласования и с помощью исполнительного механизма 5 и регулирующего органа 6 осуществляет управляющее воздействие на управляемый объект I. В конкретных случаях отдельные элементы регулятора II могут быть объединены в одном блоке или вовсе отсутствовать.
|
|
|
Все элементы этой автоматической системы образуют последовательно замкнутую цепь: выходная величина предшествующего элемента служит входной величиной последующего. Подачу сигнала с выхода системы на ее вход называют обратной связью. Если сигнал обратной связи суммируется с входным сигналом звена или системы, то обратная связь называется положительной. Если сигнал обратной связи вводится на вход звена или системы со знаком, противоположным входному сигналу, то обратная связь называется отрицательной.
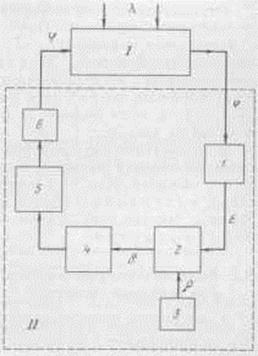
Рис. 4.1 Схема автоматической схемы регулирования
Отрицательные обратные связи играют большую роль в системах регулирования. Они улучшают переходный процесс (уменьшается инерционность), снижают погрешность звена, повышают устойчивость. Жесткие обратные связи передают сигналы с выхода звена на его вход, не изменяя их характера. Гибкие обратные связи передают с выхода звена на его вход производные (первую, вторую и т. д.) выходных величин по времени.
В автоматических системах регулирования регулятор относительно объекта включен в обратную связь, которая называется главной, или внешней обратной связью. Могут быть также внутренние обратные связи, соединяющие выход отдельных звеньев с их входом,- это так называемые местные обратные связи.
Автоматические системы по характеру алгоритма регулирования подразделяются на разомкнутые и замкнутые.
В разомкнутых системах входные возмущающие воздействия поступают только извне. Примером такой системы может служить система, позволяющая путем регулирования вручную поддерживать заданное значение температуры в автоклавах гидрогенизации.
Оператор, наблюдая за стрелкой логометра, чувствительный элемент которого (термопреобразователь сопротивления) установлен в автоклаве, увеличивает или уменьшает подачу греющего пара или холодного масла в змеевики автоклавов. В данном случае величина температуры в автоклавах (выход) не вызывает открытия или закрытия вентилей на паро- и маслопроводе (вход) без участия человека.
|
|
|
Состояние входа системы приводится в соответствие с состоянием выхода действиями человека. Только благодаря работе оператора система регулирования замыкается. Чтобы автоматизировать процесс регулирования, вместо оператора нужно поставить автоматическое управляющее устройство.
Если в нашем примере вместо логометра установить автоматический регулирующий мост, то возникшее нежелательное отклонение температуры продукта будет автоматически устраняться перемещением клапанов паро- и маслопроводов. Автоматическая система регулирования будет замкнута. Входные воздействия приходят не только извне, но и из самой автоматической системы.
По характеру алгоритма функционирования автоматические системы делятся на стабилизирующие, программные и следящие.
Стабилизирующими называются автоматические системы, алгоритм функционирования которых содержит предписание поддерживать постоянное значение регулируемой величины (см. рис. 4.2) /Условные обозначения приборов и средств автоматизации на приводимых схемах см. в ПРИЛОЖЕНИИ/.
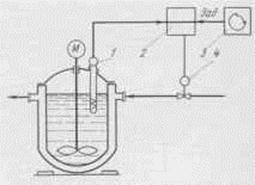
Рис. 4.2 Стабилизирующая автоматическая система регулирования
В большинстве таких систем, применяемых в настоящее время, заданное значение регулируемой величины устанавливается оператором и сохраняется постоянным длительное время. Примером может служить автоматическая система регулирования температуры кожухотрубного противоточного теплообменника (рис. 4.2).
Температура продукта на выходе регулируется путем изменения расхода теплоагента. Система состоит из чувствительного элемента 1, термометра для отходящего продукта, регулятора 2, регулирующего клапана 3 на линии подачи теплоагента и объекта 4. Сигнал от чувствительного элемента, пропорциональный текущему значению регулируемой температуры, подается на вход автоматического регулятора, где сравнивается с сигналом, пропорциональным заданному значению регулируемой температуры на выходе. Сигнал регулирующего воздействия формируется в зависимости от величины и знака отклонения текущего значения регулируемой температуры от заданного значения и подается на регулирующий клапан, который изменяет подачу теплоагента, приводя температуру к заданному значению.
|
|
|
Программными называются автоматические системы (рис. 4.3), алгоритм функционирования которых содержит предписание изменять регулируемую величину в соответствии с заранее заданной последовательностью изменений во времени. Эти системы находят применение в тех случаях, когда в ходе технологического процесса регулируемую величину необходимо изменять по заданному закону (программе).
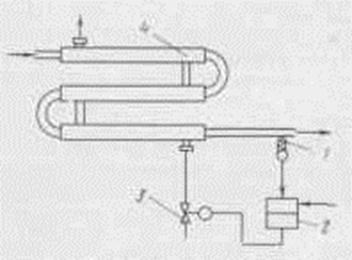
Рис. 4.3 Система программного регулирования температуры
Многие процессы в аппаратах периодического действия протекают следующим образом: в аппарат загружают необходимые компоненты, включают мешалку. После этого масса охлаждается (нагревается) до заданной температуры и выдерживается в течение заданного времени. Затем готовый продукт выгружают. Зависимость изменения температуры массы от времени является программой изменения регулируемого параметра. Устройство, которое изменяет заданное значение регулируемого параметра в соответствии с программой, называется программным задатчиком.
Автоматическая система регулирования температуры (рис. 8-3) состоит из чувствительного элемента 1, регулятора 2 с программным задатчиком 3, регулирующего клапана 4 па линии подачи хладагента (тепло-агента) в рубашку аппарата. Входным сигналом для регулятора служит разность между текущим значением температуры продукта и ее заданным значением в данный момент времени, вырабатываемым программным задатчиком. Если эта разность равна нулю, то количество холода (тепла), вводимое в рубашку за единицу времени, обеспечивает уменьшение (увеличение) температуры продукта с заданной скоростью. В противном случае регулятор подает сигнал клапану на увеличение или уменьшение расхода хладоносителя (теплоносителя).
Следящими называют автоматические системы, алгоритм функционирования которых содержит предписание изменять регулируемую величину в зависимости от значения заранее неизвестной переменной величины на входе автоматической системы.
В схемах автоматизации производства следящие системы применяются в виде схем регулирования соотношения расходов различных веществ. В качестве примера рассмотрим автоматическую систему регулирования соотношения расходов сред, поступающих в реакционный аппарат (рис. 8-4).
Один из потоков - ведущий (Q0-представляет собой количество основного продукта, поступающего в реакционный аппарат, т. е. его расход является независимой величиной для системы регулирования соотношения. Другой поток - ведомый (Q2) - количество другого продукта, поступающего в реакционный аппарат. Задача системы регулирования - поддержать расход второго потока в определенном соотношении с расходом первого.
Автоматическая система регулирования соотношения расходов сред состоит из двух чувствительных элементов / и 2, регулятора соотношения 3 и регулирующего клапана 4 на линии подачи второго потока. Сигнал от чувствительного элемента /, пропорциональный расходу ведущего потока, служит заданием для регулятора соотношения. Сигнал от чувствительного элемента 2, пропорциональный расходу ведомого потока, поступает в регулятор как регулируемая переменная. Регулятор соотношения вырабатывает сигнал, по которому регулирующий орган (клапан 4) изменяет расход второго потока так, чтобы его отношение к расходу первого потока оказалось равным заданной величине.
Стабилизирующая, программная и следящая системы относятся к группе автоматических систем регулирования, у которых текущее значение регулируемого параметра сравнивается с его заданным значением, и в случае рассогласования этих величин управляющее устройство вырабатывает сигнал, который воздействует на регулирующий орган и приводит систему в установившееся состояние.
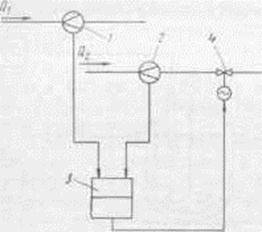
Рис. 4.4 Схема автоматического регулирования соотношения расходов двух потоков
3. СИСТЕМЫ АВТОМАТИЧЕСКОГО ПОИСКА.
В последние годы получили большое развитие более сложные системы, в частности системы автоматического поиска. Одной из таких систем является система экстремального (оптимального) регулирования. Она осуществляет автоматический поиск оптимального значения управляющего воздействия, обеспечивающего экстремум некоторого показателя эффективности процесса.
Работа объекта может считаться оптимальной при максимальном КПД, либо при минимальной себестоимости единицы продукции, минимальной затрате энергии на выработку единицы продукции и т. д.
На производстве в качестве теплоносителя часто используются горячие газы, получаемые в результате сжигания того или иного вида топлива. Зависимость между расходом воздуха, необходимого для горения, и температурой топочных газов носит экстремальный характер.
На рис. 4.5 изображена система экстремального регулирования температуры. Топливо через вентиль 1 поступает в форсунку 2. Температура в топке 3 измеряется малоииерционным термопреобразователем 4. Сигнал от термопреобразователя усиливается и дифференцируется. Напряжение, пропорциональное производной от температуры (входное напряжение), поступает на одну из обмоток (А или Б) знакового реле В, которое включает обмотку / или // электродвигателя исполнительного механизма 6. При включении обмотки / исполнительный механизм уменьшает подачу воздуха, а при включении обмотки // - увеличивает. На оси электродвигателя установлен тахогенератор 5, подающий напряжение, пропорциональное производной по времени перемещения регулирующего органа 7, в обмотку знакового реле В. Обмотки знакового реле включены так, что при изменении подачи воздуха в сторону увеличения температуры переключений в нем не происходит. Если же расход воздуха изменяется в сторону уменьшения температуры, то знаковое реле производит реверсирование исполнительного механизма в сторону приближения к максимуму.
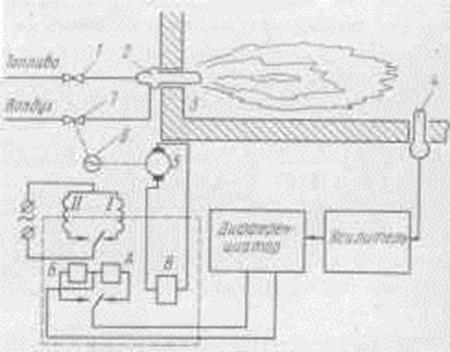
Рис. 4.5 Схема экстремального регулирования
В случае, указанном на рис. 4.5, включена обмотка А. Знак напряжения на этой обмотке позволяет включить обмотку I исполнительного механизма. Напряжение тахогенератора имеет такой знак, при котором обмотка знакового реле удерживает включенной обмотку А. По мере приближения к максимуму напряжение на выходе дифференциатора уменьшается, доходит до нуля и затем меняет свой знак. Обмотка А перебрасывает контакт, замыкая обмотку II электродвигателя исполнительного механизма. Напряжение на выходе тахогенератора меняет знак. Реле В перебрасывает контакт, включая обмотку Б. Однако переключения исполнительного механизма не происходит, поскольку напряжение на выходе дифференциатора удерживает контакт, управляющий исполнительным механизмом, в прежнем положении. Затем процесс повторяется. Система совершает колебательные движения (поиск) около максимума.
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 3243; Нарушение авторских прав?; Мы поможем в написании вашей работы!