КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Замена высших кинематических пар низшими
Как известно, плоские звенья могут иметь звенья, входящие как в низшие, так и в низшие пары. При изучении структуры и кинематики плоских механизмов во многих случаях удобно заменять высшие пары кинематическими цепями или звеньями, входящими только в низшие вращательные и поступательные пары 5–го класса.
 При этой замене должно удовлетворяться условие, чтобы механизм, полученный после такой замены, обладал прежней степенью свободы и чтобы сохранились относительные в рассматриваемом положении движения всех его звеньев. Рассмотрим трехзвенный механизм, показанный на рисунке.
При этой замене должно удовлетворяться условие, чтобы механизм, полученный после такой замены, обладал прежней степенью свободы и чтобы сохранились относительные в рассматриваемом положении движения всех его звеньев. Рассмотрим трехзвенный механизм, показанный на рисунке.
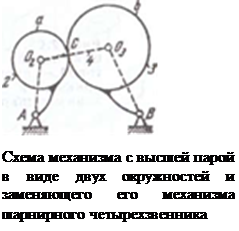
Механизм состоит из двух подвижных звеньев2 и3, входящих во вращательные пары V класса А и В со стойкой 1 и высшую пару С IV класса, элементы звеньев а и b которой представляют собою окружности радиусов 02С и 03С. Согласно формуле Чебышева степень свободы механизма будет

Можно показать, что рассматриваемый механизм может быть заменен эквивалентным ему механизмом шарнирного четырехзвенника АО2О3В. Высшая пара IV класса в точке С заменяется звеном 4, входящим в точках 02 и 03 во вращательные пары V класса. Полученный в результате замены механизм АО2О3В называется заменяющим механизмом.
Степень свободы W заменяющего механизма будет той же, что и у заданного механизма:

Так как элементы а и b звеньев являются окружностями с центрами в точках О2 и О3, то длина О2О3 звена 4 оказывается постоянной. Точно так же будут постоянными и длины АО2 и ВО2 звеньев 2 и 3. Заменяющий механизм АО2О3В эквивалентен заданному и с точки зрения законов движения звеньев 2 и 3.
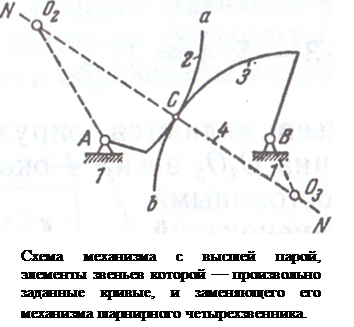 Рассмотренный способ получения заменяющего механизма можно обобщить. Пусть задан механизм с высшей парой, элементы звеньев которой представляют собой произвольно заданные кривые а и b (рисунок). Для построения схемы заменяющего механизма проводим нормаль NN в точке С касания кривых и отмечаем на ней центры О2и О3 кривизны кривых а и b. По-прежнему центры кривизны О2и О3 мы считаем шарнирами, образующими вращательные пары, в которые входят условные звенья АО2 и О2О3, с одной стороны, и условные звенья ВО3 и О2О3, с другой стороны.
Рассмотренный способ получения заменяющего механизма можно обобщить. Пусть задан механизм с высшей парой, элементы звеньев которой представляют собой произвольно заданные кривые а и b (рисунок). Для построения схемы заменяющего механизма проводим нормаль NN в точке С касания кривых и отмечаем на ней центры О2и О3 кривизны кривых а и b. По-прежнему центры кривизны О2и О3 мы считаем шарнирами, образующими вращательные пары, в которые входят условные звенья АО2 и О2О3, с одной стороны, и условные звенья ВО3 и О2О3, с другой стороны.
Описанная замена правильна для заданного положения основного механизма. В другом положении схема заменяющего механизма останется той же, размеры же его звеньев изменятся, поскольку центры кривизны О2 и О3 сместятся.
Из дифференциальной геометрии известно, что окружность кривизны в точке касания с кривой и сама кривая эквивалентны до производных второго порядка включительно, и поэтому заменяющий механизм эквивалентен основному в такой же степени, т. е. положения, скорости и ускорения одноименных точек того и другого механизма будут одинаковыми.
 Если один из соприкасающихся элементов будет представлять собой некоторую кривую a, а второй прямую b (рисунок), то центр кривизны второго профиля будет бесконечно удален.
Если один из соприкасающихся элементов будет представлять собой некоторую кривую a, а второй прямую b (рисунок), то центр кривизны второго профиля будет бесконечно удален.
Условное звено 4 в этом случае будет входить в центре кривизны О2 элемента 2 во вращательную пару V класса. Вторая вращательная пара, в которую должно входить звено 3, имеет бесконечно удаленную ось вращения и переходит в поступательную пару также V класса.
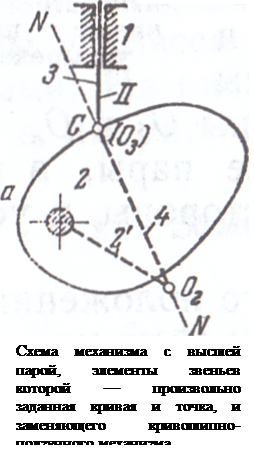
Далее возможен случай, когда один из соприкасающихся элементов — кривая а, а другой — точка С (рисунок). В этом случае центр кривизны О3 элемента С совпадает с самой точкой С, и поэтому условное звено 4 должно входить в две вращательные пары V класса — во вращательную пару с осью, проходящей через центр кривизны О2 криволинейного элемента а, и во вращательную пару с осью, проходящей через точку С.
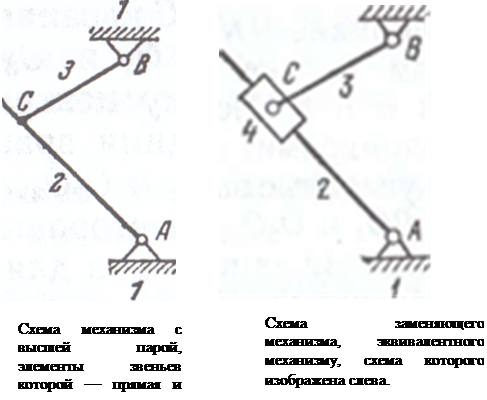 В том случае, когда одним элементом является прямая АС, а другим — точка С (рисунок), замена сводится к постановке условного звена 4, входящего в одну поступательную и одну вращательную пары.
В том случае, когда одним элементом является прямая АС, а другим — точка С (рисунок), замена сводится к постановке условного звена 4, входящего в одну поступательную и одну вращательную пары.
Ось вращательной пары и ось движения поступательной пары должны проходить через точку соприкосновения С.
Таким образом, любой плоский механизм с высшими парами IV класса может быть заменен механизмом, в состав которого входят только низшие кинематические пары V класса.
Если все высшие пары IV класса в плоском механизме заменены низшими парами, то структурная формула для заменяющего механизма получит вид
|
|
Дата добавления: 2014-01-20; Просмотров: 4045; Нарушение авторских прав?; Мы поможем в написании вашей работы!