КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дайте определение телемеханической системы
Что такое «Комплекс устройств телемеханики».
Что такое «Устройство телемеханики»?
Что такое «Телемеханический пункт управления»?
Что такое «Контролируемый телемеханический пункт»?
Дайте определение телемеханики.
Комплекс устройств телемеханики – совокупность устройств пунктов управления и контролируемых пунктов, предназначенных для совместного применения в телемеханических системах.
Телемеханический пункт управления –это место, с которого осуществляется управление или контроль состояния объектов, расположенных на контролируемом пункте. При частичной автоматизации в пункте управления находится диспетчер.
Устройство телемеханики – совокупность технических средств телемеханики, расположенных на телемеханическом пункте управления или контролируемом телемеханическом пункте.
Телемеханическая система – совокупность устройств пунктов управления и контролируемых пунктов, периферийного оборудования, необходимых линий и каналов связи, предназначенных для совместного выполнения телемеханических функций.
КОНТРОЛЬНЫЕ ВОПРОСЫ
2. ОСНОВНЫЕ ПОНЯТИЯ
О СИСТЕМАХ ТЕЛЕМЕХАНИКИ
2.1. ОБЪЕКТЫ ТЕЛЕМЕХАНИКИ
Объект телемеханики – это технологический процесс, техническое устройство, состояние которого контролируется или управляется средствами телемеханики.
В зависимости от характера технологических процессов, протекающих в объекте, различают следующие типы объектов контроля и управления.
Непрерывные объекты, в которых процессы протекают непрерывно и выходная величина является непрерывной. Например, расход продукта в продуктопроводе, величина пластового давления в скважине, уровень нефтепродукта в ёмкости и другие.
Дискретные объекты, в которых процессы протекают дискретно и выходная величина является дискретной. Например, положение путевой железнодорожной стрелки, состояние «включено – выключено» масляного электрического выключателя и другие.
Дискретно-непрерывные объекты, в которых в пределах дискретного состояния технологические процессы протекают непрерывно. Например, электрический двигатель в состояниях «включено – выключено» характеризуется дискретными состояниями, а развиваемая им скорость в состоянии «включено» представляет собой непрерывную составляющую.
Телемеханическим объектом может быть человек или живой организм, если его состояние контролируется средствами телемеханики. Например, состояние космонавта, спортсмена может контролироваться в течение длительного времени средствами телемеханики.
По критерию пространственного размещения (топологии) объектов различают следующие типы объектов:
– сосредоточенные объекты, располагающиеся на небольшом расстоянии или площади, например, промышленное предприятие нефтехимического или машиностроительного производства;
– распределённые объекты, располагающиеся на больших площадях или расстояниях, например, нефтяное или газовое месторождение, ирригационные системы, сети передачи электрической энергии и другие.
2.2. ТЕЛЕМЕХАНИЧЕСКИЕ ФУНКЦИИ
Тип телемеханической функции, реализуемой системой телемеханики, зависит от типа объекта. Различают следующие типы телемеханических функций.
Телемеханическая функция телеизмерения (ТИ) – это передача текущих значений непрерывных величин. Применяется для непрерывных объектов. Структурная схема системы ТИ представлена на рис. 2.1. Информация с непрерывных датчиков, установленных на объектах, поступает в устройство контролируемого пункта, далее по линии связи передаётся в устройство диспетчерского пункта управления, где отображается с помощью индикаторов, а также может вводиться в ЭВМ, регистрироваться специальными приборами. Система ТИ разомкнута.
Частным случаем системы ТИ является система телеконтроля, в которой индикатор отображает отклонение текущего значения измеряемой величины от её номинального значения (уставки).
Телемеханическая функция телесигнализации (ТС) – это передача текущих значений дискретных величин. Применяется для дискретных объектов. Структурная схема системы ТС приведена на рис. 2.2. Информация с дискретных датчиков, установленных на объектах, поступает в устройство КП, далее по линии связи передаётся в устройство ПУ, где отображается с помощью индикаторов, а также может вводиться в ЭВМ, регистрироваться специальными приборами. Система ТС разомкнута.
Телемеханическая функция телеуправления (ТУ) – передача командной информации на изменение состояния объектов. Применяется для дискретных объектов. Структурная схема системы ТУ приведена на рис. 2.3. Команды вырабатываются диспетчером или ЭВМ, поступают в устройство ПУ, далее по линии связи передаются в устройство КП, где поступают на исполнение и изменяют состояние объектов. Система ТУ разомкнута.
Рис. 2.1. Структурная схема системы телеизмерения:
И – индикаторы; М – монитор; НОУ – непрерывный объект управления;
НД – непрерывный датчик
Рис. 2.2. Структурная схема системы телесигнализации:
ДИ – дискретный индикатор; М – монитор; ДОУ – дискретный объект управления;
ДД – дискретный датчик
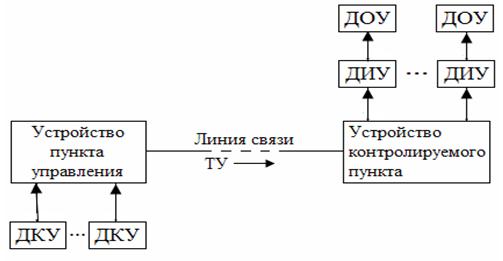
Рис. 2.3. Структурная схема системы телеуправления:
ДКУ – дискретное командное устройство; ДОУ – дискретный объект управления;
ДИУ – дискретное исполнительное устройство
Телемеханическая функция телерегулирования (ТР) – это система, осуществляющая передачу командной информации на изменение режима работы объекта. Применяется для непрерывных объектов. Система ТР может быть реализована одним из двух вариантов:
· прямое ТР, или просто ТР, схема этой системы представлена на рис. 2.3 с заменой дискретных командных устройств на непрерывные и дискретных исполнительных устройств, установленных на объектах управления, на непрерывные. Система ТР разомкнута;
· телеуправление уставок регулятора (ТУУ), в этом случае на КП режим работы непрерывного объекта управления регулируется локальной системой автоматического управления (ЛСАУ), в которой непрерывная уставка регулятора изменяется по командам с ПУ. Система ТУУ разомкнута, а ЛСАУ – замкнута (рис. 2.4).

Рис. 2.4. Структурная схема системы телеуправления уставок регулятора:
НКУ – непрерывное командное устройство; НОУ – непрерывный объект управления;
Рег – регулятор локальной системы автоматического управления
Кроме однофункциональных систем, реализующих одну телемеханическую функцию, существуют многофункциональные, в которых выполняются несколько функций. Например, многофункциональная система телеуправления и телесигнализации (ТУ-ТС) – система, позволяющая передавать команды с ПУ на КП (см. рис. 2.3) и получать известительную информацию об исполнении команды, посылаемую с КП на ПУ (см. рис. 2.2). Система ТУ-ТС может замыкаться через человека-оператора или через ЭВМ.
Промышленные системы телемеханики всегда являются многофункциональными, в них в различных сочетаниях используются рассмотренные выше основные телемеханические функции.
2.3. ОСНОВНЫЕ СТРУКТУРЫ СИСТЕМ ТЕЛЕМЕХАНИКИ
Основной задачей телемеханики является контроль и управление объектами на расстоянии. Различают следующие виды управления на расстоянии.
1. Местное управление (рис. 2.5). Командное устройство в виде ключа К вырабатывает команды управления, которые по силовой линии поступают на объект управления ОУ и изменяют его состояние, например, путём включения или отключения электрического двигателя. Для реализации этого управления требуется дорогостоящая силовая линия, которая тем дороже, чем больше расстояние и мощность двигателя объекта управления, так как требуется большее сечение кабеля силовой линии.
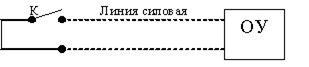
Рис. 2.5. Структурная схема местного управления:
К – ключ управления; ОУ – объект управления; источник питания условно не показан
2. Дистанционное управление (рис. 2.6). Оно отличается от местного управления тем, что вместо силовой линии используется линия связи совместно с релейным усилителем мощности Р для управления электрическим двигателем объекта управления. Это более экономичная реализация управления, так как линия связи, используемая для передачи маломощных сигналов управления, имеет меньшее поперечное сечение проводников и, следовательно, меньшую стоимость.

Рис. 2.6. Структурная схема дистанционного управления:
К – ключ управления; ОУ – объект управления; Р – обмотка реле;
1Р – контакт реле; источники питания условно не показаны
В системе дистанционного управления каждому объекту управления требуется отдельная линия связи.
3. Телемеханическое управление (рис. 2.7), обеспечивающее использование одной линии связи для управления множеством объектов.
Эта схема обобщает все телемеханические функции. Например, при реализации телемеханической функции ТИ в работе участвуют не все блоки данной схемы. В этом случае режим работы непрерывного объекта ОУ измеряется непрерывным датчиком Д, сигнал с которого кодером К2 преобразуется в телемеханический код, который далее преобразуется передатчиком П2 в линейный сигнал, поступающий в линию связи. Из линии связи сигнал поступает в приёмник Пр2 и преобразуется в нём в телемеханический код, который далее декодер Дк2 преобразует в информационный сигнал, отображаемый индикатором И для предъявления оператору ОП. Таким образом, сигнал проходит через следующие звенья: О – Д – К2 – П2 – ЛС – Пр2 – ДК2 – И – ОП. Остальные блоки в работе не участвуют.
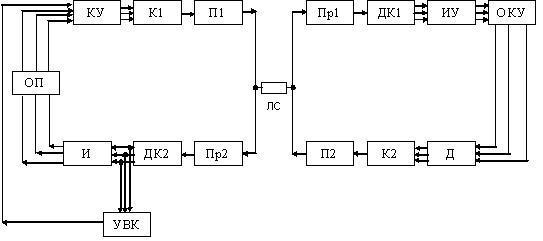
Рис. 2.7. Обобщённая структурная схема телемеханической системы:
ОКУ – комплекс объектов контроля и управления; Д – комплекс датчиков;
ИУ – комплекс исполнительных устройств; К1, К2 – кодирующие устройства (кодеры);
П1, П2 – передающие устройства; ЛС – линия связи; Пр1, Пр2 – приемное устройство;
Дк1, Дк2 – декодирующие устройства; И – комплекс индикаторов; ОП – человек-оператор,
КУ – комплекс командных устройств, УВК – управляющий вычислительный комплекс
Аналогичным образом можно составить структурную схему телемеханической системы, реализующей как основные телемеханические функции, так и любые их сочетания.
Структура системы телемеханики зависит также от того, как расположены объекты контроля и управления. Имеет значение, собраны ли объекты в одном месте, т.е. находятся недалеко друг от друга, или рассредоточены на большой территории. Здесь существуют две разновидности систем.
Система телемеханики для сосредоточенных объектов – система, в которой имеется один пункт управления и один контролируемый пункт. Примером такого объекта является строительный кран, где на малой площади расположено 5-6 двигателей, которыми нужно управлять. Другой пример – электрическая подстанция, где в одном помещении находится множество масляных выключателей, включаемых и отключаемых с телемеханического пункта управления.
Система телемеханики для рассредоточенных объектов – система, в которой есть один пункт управления и несколько контролируемых пунктов. Примером таких объектов являются вытянутые на тысячи километров газо- и нефтепроводы, в которых нужно контролировать давление, расход и другие параметры, управлять компрессорными или насосными установками, а также насосные установки на нефтепромыслах, разбросанные на большой территории. Очевидно, устройства телемеханики и линии связи (каналы связи) на нефтепроводах, нефтепромыслах будут расположены по-иному, вследствие чего и системы телемеханики будут, в свою очередь, отличаться друг от друга.
Телемеханическая сеть – совокупность устройств телемеханики и объединяющих их линий связи.
Многоточечная структура телемеханической сети – структура телемеханической сети, в которой два устройства (или более) контролируемых телемеханических пунктов соединяются линиями связи с устройством телемеханики на телемеханическом пункте управления.
Цепочечная структура телемеханической сети – многоточечная структура телемеханической сети, в которой устройства контролируемых телемеханических пунктов соединены общей линией связи с устройством телемеханического пункта управления. Такая структура (рис. 2.8) характерна для систем телемеханики, обслуживающих нефтепроводы.
Рис. 2.8. Цепочечная структура телемеханической сети:
ПУ – устройство пункта управления; 1КП,…NКП – устройства контролируемого пункта
соответствующего номера; 1, 2…ni, i=1, 2, N… – телемеханические объекты
Разновидностью цепочечной структуры является кольцевая структура, в которой линия связи образует кольцо и телемеханический пункт управления при этом может быть связан с каждым контролируемым телемеханическим пунктом двумя различными путями.
Радиальная структура телемеханической сети – многоточечная структура телемеханической сети, в которой устройство телемеханического пункта управления соединено отдельной линией связи с каждым устройством контролируемого пункта. Такая структура представлена на рис. 2.9.
Древовидная структура телемеханической сети – это комбинация радиальной и цепочечной структур (рис. 2.10). В этой структуре один КП (5КП на рис. 2.10) используется как ретранслятор для передачи информации от ПУ на другие КП (6КП и 7КП на рис. 2.10), а также ретрансляции обратной информации на ПУ с указанных КП.
Выбор типа конфигурации телемеханической сети определяется топологией рассредоточенных объектов и производится по критерию минимальной стоимости затрат на создание линий связи с учётом возможностей комплекса телемеханических устройств.
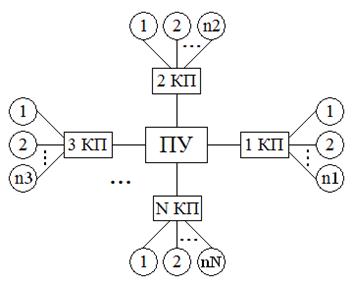
Рис. 2.9. Радиальная структура телемеханической сети:
ПУ – устройство пункта управления; 1КП,…NКП – устройства контролируемого пункта
соответствующего номера; n1,n 2…nN – телемеханические объекты на контролируемом пункте соответствующего номера
Рис. 2.10. Древовидная структура телемеханической сети:
ПУ – устройство пункта управления; 1КП,…7КП – устройства контролируемого пункта
соответствующего номера; 1, 2…ni; i=1, 2, …7 – телемеханические объекты
КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ
Объект телемеханики – это технологический процесс, техническое устройство, состояние которого контролируется или управляется средствами телемеханики.
Непрерывный объект – это объект, в котором процессы протекают непрерывно и выходная величина является непрерывной.
|
|
Дата добавления: 2014-01-20; Просмотров: 617; Нарушение авторских прав?; Мы поможем в написании вашей работы!