КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дайте определение радиальной структуре телемеханической сети
Дайте определение цепочечной структуре телемеханической сети.
Дайте определение многоточечной структуре телемеханической сети.
3. ОРГАНИЗАЦИЯ МНОГОКАНАЛЬНОЙ
ТЕЛЕМЕХАНИЧЕСКОЙ СВЯЗИ
3.1. ВРЕМЕННОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
В телемеханических системах одна линия связи используется для контроля и управления многими объектами. С этой целью линия связи уплотняется путём образования телемеханических каналов.
Телемеханический канал связи – это комплекс технических средств, служащих для передачи информации от источника к получателю. Канал связи состоит из линии связи и аппаратуры связи.
Для создания телемеханических каналов все сигналы, передаваемые по линии связи и несущие информацию своему объекту, разделяются.
Разделение сигналов – обеспечение независимой передачи и приема многих сигналов по одной линии связи или в одной полосе частот, при которой сигналы сохраняют свои свойства и не искажают друг друга.
Существуют следующие типы разделения сигналов:
– временное;
– частотное;
– частотно-временное.
Временное разделение сигналов заключается в том, что каждому из п сигналов, которые должны быть переданы, линия связи предоставляется поочередно. Сначала за промежуток времени t 1 передается сигнал 1, за промежуток t 2 – сигнал 2 и т.д. (рис. 3.1). При временном разделении или временном уплотнении сигналов каждый сигнал занимает свой временной интервал, не занятый другими сигналами. Время, которое отводится для передачи всех сигналов, называется циклом.
Между информационными временными интервалами ti, в которых передаются сообщения, необходимы защитные временные интервалы (см. рис. 3.1) во избежание взаимного влияния сигнала одного канала на сигнал соседнего канала, т.е. переходных искажений. При правильном выборе полосы пропускания, а также соотношения между длительностью импульсов и паузой взаимное влияние каналов нетрудно предотвратить [8].
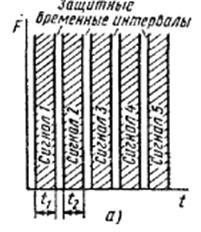
Рис. 3.1. Частотно-временная характеристика
временного разделения сигналов
Для реализации временного разделения используют устройства, которые называются коммутаторами, или распределителями.
Коммутатор (или распределитель) – это устройство с несколькими выходами, выходной сигнал которого имеется только на одном выходе и последовательно перемещается с первого выхода на последний. Аналогично определяется коммутатор с несколькими входами и одним выходом.
В системе с временным разделением сигналов один коммутатор устанавливают на пункте управления, а другой – на контролируемом пункте (рис. 3.2).
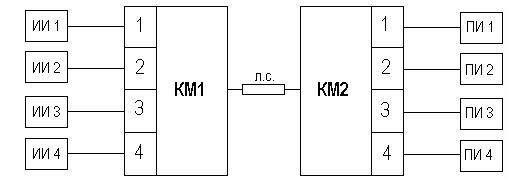
Рис. 3.2. Структурная схема телемеханической системы
с временным разделением сигналов:
ИИ1, …ИИ4 – источники информации; КМ1, КМ2 – коммутаторы;
ПИ1, …ПИ4 – приёмники информации
В современной реализации этой схемы могут быть применены: в качестве КМ1 – мультиплексор, в качестве КМ2 – демультиплексор, у которых соответственно выход и вход подключены к линии связи.
Коммутаторы КМ1 и КМ2 работают синхронно и синфазно, они находятся на одних и тех же позициях и переключаются одновременно.
Когда они находятся на первой позиции, то первый источник информации ИИ1 через первую позицию коммутатора КМ1 и его выход подключен к линии связи. Второй конец линии связи подключён через вход коммутатора КМ2 и его первую позицию к приёмнику информации ПИ1. Таким образом, на первой позиции коммутаторов по линии связи передаётся информация от ИИ1 к ПИ1.
Далее коммутаторы переключаются на вторую позицию и передаётся информация от ИИ2 к ПИ2, на третьей позиции коммутаторов передаётся информация от ИИ3 к ПИ3, на четвёртой – от ИИ4 к ПИ4.
Промежуток времени, за который передаётся информация от всех источников своим получателям, называется циклом. На рис. 3.3 для упрощения представлен цикл, состоящий всего из четырех позиций, образуемых при работе коммутаторов. В первом цикле (верхняя строка рисунка) показана передача четырех телеизмеряемых величин (ТИ 1 – ТИ 4), во 2-м цикле дается пример передачи команды телеуправления на первой позиции и приема сигнала телесигнализации на четвертой. Ввиду отсутствия информации вторая и третья позиции в этом цикле не используются.
Такое ВР при передаче дискретной информации называют синхронным временным разделением (СВР). При СВР информация может передаваться в каждой позиции каждого цикла.
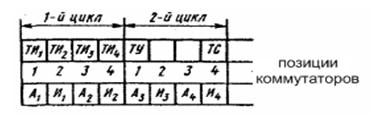
Рис. 3.3. Диаграмма работы системы с временным разделением сигналов
Непрерывная передача информации возможна лишь в том случае, если источник информации готов к передаче, т.е. ему есть что передавать. В телемеханике непрерывно передаются текущие телеизмерения. Командная информация обычно передается реже. Поэтому при СВР используют далеко не все позиции, что приводит к недогруженности канала связи.
Для увеличения пропускной способности системы с временным разделением каждую позицию можно не закреплять за определенным источником информации, а предоставлять её в первую очередь источнику, у которого накопилась информация, т.е. который находится в активном, или возбужденном, состоянии.
Этот способ временного разделения называют асинхронным временным разделением (АВР). При СВР сигналы определенного канала выделяются на приеме просто, так как при передаче каждому каналу в цикле отведена своя позиция. При АВР передача информации с данного источника может происходить на разных позициях цикла, которые неизвестны на приеме. Поэтому при АВР необходима дополнительная посылка адреса получателя передаваемой информации, чтобы она была принята именно тем приемником, которому предназначается.
В нижней строке рис. 3.3 приведен пример асинхронного временного разделения, на первой и третьей позициях цикла передаются адреса (А1, А2, А3, А4), а на второй и четвёртой позициях – информация (соответственно И1, И2, И3, И4).
3.2. ЧАСТОТНОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
Частотное разделение сигналов заключается в том, что для каждого из «п» сигналов, подлежащих передаче, выделяется своя полоса частот: для сигнала №1 – DF1, для сигнала №2 – DF2 и так далее (рис. 3.4). Это значит, что при частотном разделении (частотном уплотнении) каждый сигнал занимает свой частотный интервал, не занятый другими сигналами, т.е. каждому из п сигналов, которые должны передаваться, присваивается своя частота: сигналу №1 – DF1, сигналу №2 – DF2 и сигналу №n – DFn.
На передающей стороне, в качестве которой в системе телеуправления является ПУ, помещаются генераторы частот Г 1,..., Гп, каждый из которых генерирует синусоидальное колебание соответствующей частоты f 1, f 2,..., fп. Ключи К 1, …, Кn служат командными устройствами, вырабатывающими команды телеуправления. Каждый полосовой фильтр ПФ 1, …, ПФп, имеет центральную частоту, соответствующую частоте «своего» генератора.
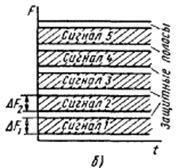
Рис. 3.4. Частотно-временная характеристика
частотного разделения сигналов
Технически такая передача, например, для телеуправления осуществляется следующим образом (рис. 3.5).
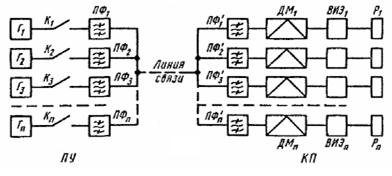
Рис. 3.5. Структурная схема системы телеуправления
с частотным разделением сигналов
Г1,..., Гn – генераторы гармонических колебаний; К1, …, Кn – ключи;
ПФ1, …, ПФп – полосовые фильтры; ДМ1, …, ДМn – демодуляторы;
ИЭ1, …, ВИЭn – выходные исполнительные элементы; Р1, …, Рn – электромеханические реле
На приемной стороне (КП) каждый из посланных сигналов выделяется сначала полосовым фильтром, настроенным на данную частоту, с него поступает на соответствующий демодулятор ДМ, после чего эта команда поступает на выходной исполнительный элемент ВИЭ, который в свою очередь включает «своё» электромеханическое реле Р.
Для включения реле P 1нужно замкнуть ключом К 1 цепь генератора Г 1, который посылает в линию связи частоту f 1. На КП этот сигнал проходит только через фильтр  и после выпрямления включает реле Р 1.
и после выпрямления включает реле Р 1.
Аналогично ключом К 2 включается реле P 2 и т.д., причём по линии связи можно одновременно передавать несколько сигналов и каждый сигнал будет принят только своим получателем информации. За время, равное длительности одного сигнала, могут быть переданы сразу все или несколько сигналов.
Ширина полосы частот каждого частотного сигнала (канала) определяется нестабильностью генератора, длительностью импульса (при импульсной передаче) и качеством фильтра. Стабильность генераторов и крутизна характеристики фильтров не могут быть идеальными, поэтому, во-первых, между частотными каналами предусмотрены защитные полосы, во-вторых, введены фильтры ПФ 1, …, ПФп,препятствующие попаданию в линию связи сигналов с генераторов в случае значительного дрейфа их частот.
3.3. ЧАСТОТНО-ВРЕМЕННОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
Частотно-временное разделение сигналов заключается в том, что каждая позиция временного разделения уплотняется несколькими частотными каналами. Схема частотно-временного разделения сигналов сочетает схему временного разделения (см. рис. 3.2) и схему частотного разделения (см. рис. 3.4).
Частотно-временное разделение является производным от частотного и временного разделений, поэтому ему присущи достоинства и недостатки частотного и временного разделения.
Временное и частотное разделения сигналов являются основными в телемеханике. Сравнивать их можно по различным параметрам. Сравнение, например, по технической реализации показывает, что временное разделение хорошо реализуется на современных цифровых устройствах, это проще, чем реализация с использованием частотно-зависимых элементов, которыми являются генераторы гармонических колебаний и полосовые фильтры. Недостатком временного разделения является меньшее быстродействие, так как по линии связи предаётся только один сигнал.
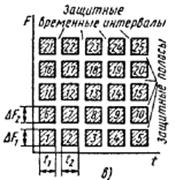
Рис. 3.6. Частотно-временная характеристика
частотно-временного разделения сигналов
КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ
Разделение сигналов – обеспечение независимой передачи и приема многих сигналов по одной линии связи или в одной полосе частот, при которой сигналы сохраняют свои свойства и не искажают друг друга.
Временное разделение сигналов – разделение сигналов, при котором каждый сигнал занимает свой временной интервал, не занятый другим сигналом.
Частотное разделение сигналов – разделение сигналов, при котором каждый сигнал занимает свой частотный интервал, не занятый другими сигналами.
Частотно-временное разделение сигналов – разделение сигналов, при котором каждая позиция временного разделения уплотняется несколькими частотными каналами.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Дайте определение понятию «Разделение сигналов».
2. Что такое «Временное разделение сигналов»?
3. Дайте описание работы системы с временным разделением сигналов по структурной схеме.
4. Дайте определение понятию «Частотное разделение сигналов».
5. Дайте описание работы системы с частотным разделением сигналов по структурной схеме.
6. Дайте определение понятию «Частотно-временное разделение сигналов».
7. Составьте структурную схему системы с частотно-временным разделением сигналов и дайте описание её работы.
4. КОДЫ В ТЕЛЕМЕХАНИКЕ
Кодирование нашло широкое применение во многих областях современных систем связи и передачи данных, в том числе в телемеханике. Оно дополняется кодоимпульсным способом передачи сообщений, который обеспечивает удобную реализацию и защиту передаваемой информации от помех.
4.1. КОД И ЕГО ХАРАКТЕРИСТИКИ
Кодирование – преобразование дискретного сообщения в дискретный сигнал, осуществляемое по определенному правилу. В телемеханике сообщения носят либо дискретный характер, например, команды телеуправления, либо непрерывное сообщение, например сообщение ТИ, предварительно дискретизируется (квантуется по времени).
Обратный процесс – декодирование – это восстановление дискретного сообщения по сигналу на выходе дискретного канала, осуществляемое с учетом правила кодирования.
Код – совокупность условных сигналов, обозначающих дискретные сообщения. Кодовая последовательность (комбинация) – представление дискретного сигнала.
Код имеет следующие основные характеристики:
1. Основание кода ( q ) или число признаков, равное числу отличающихся друг от друга символов (признаков). Наибольшее распространение получили коды с q =2, называемые бинарными, двоичными. Они характеризуются наиболее высокой надежностью передачи признаков по сравнению с кодами, имеющими другие основания.
2. Длина кодовой комбинации ( n ), называемая также разрядностью кода или длиной слова, она равна числу символов (элементарных сигналов) в кодовой комбинации. Код называется равномерным, если все кодовые комбинации одинаковы по длине, и неравномерным, если величина n в коде непостоянна. В телемеханике обычно используют равномерные коды, в которых легко контролировать длину слова для повышения помехоустойчивости.
3. Число кодовых комбинаций ( N ) в коде, каждая из которых может передавать свое отдельное сообщение. Этот показатель называют также объемом кода. Максимальный объем кода N=qn.
4. Вес кода (w), под которым понимают число единиц в кодовой комбинации.
4.2. КЛАССИФИКАЦИЯ КОДОВ
Общая классификация кодов производится по нескольким критериям.
1. По области применения различают:
1.1. Телемеханические коды.
1.2. Телеграфный код.
1.3. Коды цифровой техники (ЭВМ).
1.4. Специальные (морской, коммерческий, дипломатический, военный) коды.
Последние три из перечисленных кодов достаточно хорошо характеризуются своими названиями, в рамках настоящей дисциплины далее подробно будут рассмотрены только телемеханические коды.
2. В зависимости от цели, достигаемой кодированием, различают:
2.1. Первичные коды представления данных, или первичные коды. Они используются для отображения данных, получаемых либо при исходном кодировании дискретных величин, либо при преобразовании непрерывной величины в дискретную.
2.2. Оптимальные (эффективные) коды. Это коды, в которых принятый критерий оптимальности имеет экстремальное значение. Наиболее распространёнными являются коды с минимальным числом разрядов, приходящихся на одно сообщение. Передача таких кодов в последовательной форме, например, по линии связи, производится за минимальное время. При такой передаче недопустимы искажения, так как любое искажение приводит к необнаруживаемой ошибке воспроизведения исходной информации, поэтому такие коды в телемеханике не используются.
2.3. Помехозащищённые (корректирующие) коды. Это коды, которые способны либо обнаружить, либо обнаружить и исправить искажение, возникшее, например, при передаче. Благодаря этому свойству корректирующие коды широко применяются в телемеханике и в технике передачи данных.
3. По закономерностям кодообразования:
3.1. Числовые (взвешенные) коды, называемые еще цифровыми, имеют кодовые комбинации, образующие ряд возрастающих по весу чисел, определяемый системой счисления. Они применяются для кодирования количественной информации (например, при телеизмерении)
3.2. Нечисловые (не взвешенные) коды не имеют систем счисления и не образуют ряда возрастающих по весу кодовых комбинаций. Нечисловые коды применяются при передаче качественной информации (например, команды телеуправления). Они разделяются на следующие виды:
3.2.1. Комбинаторные, построенные по законам теории соединений.
3.2.2. Защищённые, имеющие специальные закономерности построения.
4.3. ОБЩИЕ СПОСОБЫ ПРЕДСТАВЛЕНИЯ КОДОВ
Для представления кодов применяются следующие основные способы:
1. Таблица комбинаций.
2. Кодовое дерево.
3. Геометрическая модель.
1. Таблица кодовых комбинаций представляет собой таблицу, в которой записаны все комбинации кода вместе с соответствующими числами. Например, таблица комбинаций трёхразрядного двоичного нормального (натурального) кода имеет следующий вид (табл. 4.1).
Таблица 4.1
Таблица комбинаций трёхразрядного двоичного натурального кода
| Десятичное число | Двоичный натуральный код | ||||
2. Кодовое дерево представляет собой графическое отображение множества кодовых комбинаций (рис. 4.1).
3. Геометрическая модель является другим способом графического представления кодов. Любой n -мерный двоичный код представляется n -мерным кубом, в котором каждая вершина отображает кодовую комбинацию, а длина ребра куба соответствует одной единице. В таком кубе расстояние между вершинами (кодовыми комбинациями) измеряются минимальным количеством ребер между ними (рис. 4.2).
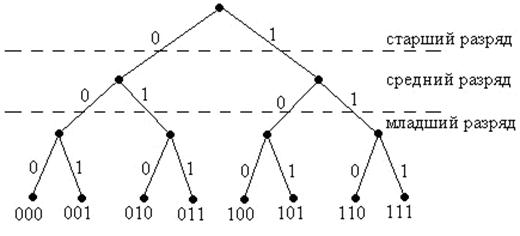
Рис. 4.1. Кодовое дерево трёхразрядного двоичного натурального кода
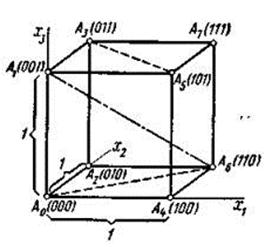
Рис. 4.2. Геометрическая модель
трёхразрядного двоичного натурального кода
Выбор способа представления определяется целью анализа или применения кода.
4.4. ПЕРВИЧНЫЕ КОДЫ
В системах телемеханики в качестве первичных используются следующие коды.
4.4.1. Единичный (унитарный, числоимпульсный) код
Кодовые комбинации его отличаются друг от друга числом единиц.
Код неравномерный, но может быть сделан равномерным путем добавления соответствующего количества нулей слева до 10. Этот код применяется в номеронабирателе телефона. Таблица кодовых комбинаций единичного кода представлена в табл. 4.2.
Таблица 4.2
Таблица комбинаций единичного кода
| Десятичное число | Единичный код | |||||||||
4.4.2. Единичный позиционный код
Кодовые комбинации отличаются друг от друга положением единицы в их разряде. Таблица комбинаций единичного позиционного кода представлена в табл. 4.3.
Таблица 4.3
Таблица комбинаций единичного позиционного кода
| Десятичное число | Единичный позиционный код | |||||||||||
Единичный позиционный код является равномерным.
4.4.3. Единично-десятичный код
Каждый разряд десятичного числа записывается в единичном коде, при этом между символами единично-десятичного кода, отображающими один разряд десятичного кода, ставится пробел.
Этот код неравномерный, но может быть преобразован в равномерный. Для этого каждый разряд десятичного числа кодируется равномерным единичным кодом. Примеры единично-десятичного кода представлена в табл. 4.4.
Таблица 4.4
|
|
Дата добавления: 2014-01-20; Просмотров: 653; Нарушение авторских прав?; Мы поможем в написании вашей работы!