КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тепловой баланс гидросистемы
|
|
|
|
Поскольку энергия, теряемая в гидросистеме, превращается в теплоту, температура жидкости повышается и при известных условиях может достигнуть недопустимых значений.. При повышении температуры понижается вязкость масла, что сопровождается повышением утечек и прогрессирующим повышением температуры за счет потери энергии при утечках. Помимо этого повышенные температуры нежелательны также вследствие повышения при этом окисления масла, сопровождающегося дальнейшим понижением вязкости и образованием смол и различных осадков.
Учитывая это, необходимо, чтобы в гидросистеме был установлен соответствующий тепловой баланс, определяемый равенством притока и отвода (эвакуации) теплоты., В тех случаях, когда температура масла превышает допустимую, следует применять воздушное или водяное охлаждение. Практически приемлемой температурой масла в гидросистеме является 50—60° С.
Приближенно можно считать, что в систему поступает в единицу времени количество теплоты, эквивалентное разности полной (приводной) мощности насоса и полезной мощности (эффективной мощности на валу гидромотора или на штоке силового цилиндра). Если в течение какого-то отрезка времени полезная работа не производится, то в теплоту превращается в единицу времени вся приводная мощность насоса..
В соответствии с указанным теряемая в гидросистеме мощность определится из выражения
Nпот = Nпод (1-η)
где Nnoa — подводимая мощность (приводная мощность насоса);
η — полный к. п. д. установки (системы).
Мощности N nom эквивалентен поток теплоты (количество теплоты в единицу времени)
A= Nпот = Nпод (1-η)
В единицах СИ если N выражена в ваттах, то единица потока теплоты А — ватт (вm).
|
|
|
Во многих случаях (при дроссельном регулировании) используемая потребителями гидравлическая энергия практически близка к нулю, а следовательно, вся работа гидравлической установки превращается в теплоту.
Повышение температуры жидкости при продавливании ее через дроссельные щели можно приближенно определить, приравняв энергию, отдаваемую вытекающей из щели жидкостью в объеме V, энергии, расходуемой на нагрев жидкости этого объема (не учитывая, что часть выделившейся теплоты уходит из системы вследствие теплоотдачи):
V Δp = VρcΔt,
| где |
V —г объем жидкости, протекающей через щель;
Δp ~ потеря (перепад) давления в щели;
ρ — плотность жидкости (для минеральных масел ρ = 900 кг/м3).
с — удельная теплоемкость жидкости [для масел с = 1,9 кдж/(кг 0)];
Δt= t — t0 — повышение температуры жидкости; здесь t и te — искомая и начальная температура жидкости.
Приняв для распространенных минеральных масел р = 900 кГ/м3 и с= 1,9 кдж/(кг 0) нагрев масла можно определить как:
Δt = 0,058 Δp,
где Δp — перепад давления в кГ/см*.
Из этого выражения следует, что при дросселировании масла под давлением от 100 кГ/см2 до атмосферного температура его повышается за один проход через дроссель примерно на 6° С.
При известных режимах работы гидросистемы потребуется применить для обеспечения заданных температурных условий охлаждающие устройства, которые применяются, как правило, при длительной работе гидроустановок мощностью 20—30 л. с., хотя в ряде случаев эти устройства применяются при меньших мощностях.
В большинстве охлаждающих устройств (теплообменников) гидросистем в качестве охлаждающей среды используют воздух или топливо
Лекция 5
1.22 ГП управления рулевыми плоскостями ЛА.
1.23 Рулевые и сервоприводы СУ ЛА.
1.24 Обратимые и необратимые следящие ГП. ГП механизации и изменения геометрии крыла.
|
|
|
Системы управления самолетов. Привод рулевых поверхностей самолета представляет одно из звеньев в замкнутом контуре управления самолета. Всего в контуре можно выделить три основных звена:
1) командное (или управляющее) звено, которым может быть летчик; автоматическая система управления и стабилизации, система автоматизации управления при пилотировании самолета летчиком и т. д.;
2) передающее звено, которым является привод рулевых поверхностей самолета;
3) управляемое звено или объект управления — самолет.
Привод рулевых поверхностей самолета в общем случае состоит из следующих основных частей:
а) блоков связи — устройств, с помощью которых привод соединяется с системами и устройствами формирования командных сигналов управления;
б) дистанционной передачи — устройства, обеспечивающего передачу командного сигнала на расстояние от блоков связи до рулевых поверхностей;
в) исполнительных механизмов — устройств, осуществляющих с усилением или без усиления по мощности преобразование командных сигналов в механическое перемещение, которое сообщается рулевым поверхностям управления;
г) системы энергоснабжения, обеспечивающей энергией (электрической, гидравлической, пневматической или механической) устройства и элементы приводов.
В СУ рулевыми поверхностями самолетов могут использоваться механический, электромеханический, гидромеханический и электрогидромеханический приводы. Основное применение в приводах рулевых поверхностей современных самолетов нашли гидравлические следящие приводы.
Применение в СУ рулями самолета гидравлических следящих приводов позволило снизить физическую нагрузку на летчика и преодолеть недопустимые с точки зрения управляемости самолета изменения усилий на рычагах управления от аэродинамических сил на руле при переходе самолета на сверхзвуковые скорости полета. Современный следящий гидравлический рулевой привод (ГРП) СУ самолетов является одним из основных ее устройств и определяет структуру всей системы, ее органов управления и компоновку на ЛА.
Гидромеханический привод рулевой поверхности представляет собой совокупность механического привода е гидравлическим следящим приводом, имеющим механическое управление (см. рис. 6.1).
|
|
|
Рис. 6.1. Система управления самолета с гидромеханическим приводом руля направления:
I — педали; 2 — устройство отключения механизма загрузки педалей; 3 — механизм загрузки педалей; 4 — механическая проводка; 5 — автопилот; б — рулевая машина; 7 — устройство включения и отключения рулевой машины; 8 — устройство переключения на аварийное управление; 9 — гидромеханический привод; 10 — аварийное управление; 11 —РН
Электрогидромеханический привод рулевой поверхности может быть выполнен в двух вариантах:
а) привод представляет собой совокупность механической проводки управления с электромеханическим и гидромеханическим следящими приводами, при этом электромеханический следящий привод осуществляет управление рулевой поверхностью через гидравлический следящий привод;
б) привод представляет собой совокупность механической проводки с гидравлическими следящими приводами, имеющими как механическое, так и электрическое (электрогидравлический следящий привод) управление.
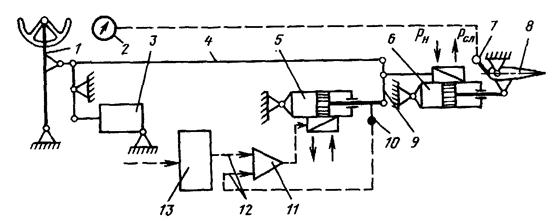
Рис. 11.4. Система управления самолета с электрогидромеханическим приводом руля высоты:
1 — рычаг управления; 2 — индикатор положения РВ; 3 — механизм загрузки; 4 — механическая проводка; 5 — электрогидравлический привод; б — гидромеханический привод; 7 — датчик положения РВ; 8 — РВ; 9 — механический сумматор; 10 — датчик обратной связи; 11 — сумматор электрических сигналов; 12 — электрические связи; /З — автоматическая система управления и стабилизации
В приведенной на рис. 11.4 схеме электрогидромеханический привод рулевой поверхности в целом представляет собой привод основной СУ. Такой привод можно использовать в вариантах: электрогидравлический привод — для основной СУ, гидромеханический привод — для аварийной СУ, которая включается в работу при отказе основной системы.
Электродистанционные СУ (рис. 11.5) определяют новый этап в развитии систем управления. Можно ожидать, что они позволят обеспечить не только автоматическую компенсацию динамической неустойчивости самолета, но и контроль и ограничение вибраций конструкции самолета, перераспределение нагрузок на планер и т. д.
|
|
|
Таким образом, применение ГРП в СУ рулями самолетов обусловлено необходимостью решения следующих основных задач:
1) усиление по мощности командных сигналов для преодоления аэродинамических нагрузок, действующих на рулевые поверхности;
2) изоляция рычагов управления рулями от аэродинамических и
Рис. 11.5. Система управления самолета с электрогидравлическим приводом стабилизатора:
I — рычаг управления; 2 — датчик положения рычагов управления и механизм загрузки; 3 — автоматическая система управления; 4 — электрические связи; 5 — сумматор электрических сигналов; б — электрогидравлический привод; 7 — стабилизатор; 8 — датчик обратной связи
вибрационных нагрузок, действующих на рулевые поверхности самолета;
3) обеспечение отклонения рулевых поверхностей по суммарным командным сигналам летчика и систем автоматической стабилизации, коррекции и ограничения предельных режимов полета для улучшения характеристик устойчивости и управляемости самолета и повышения безопасности полета;
4) увеличение жесткости, демпфирования и собственной частоты колебаний рулевых поверхностей для повышения их эффективности и обеспечения безопасности от рулевых форм флаттера;
5) уменьшение усилий на рычагах управления рулями.
По характеру выполняемых функций гидравлические следящие приводы СУ рулями самолета подразделяются на рулевые приводы и сервоприводы.
Рулевые приводы непосредственно или через механический привод соединены с рулевыми поверхностями и осуществляют механическое управление ими по поступающим на привод командным сигналам с усилением последних по мощности, используя энергию рабочей жидкости.
Сервоприводы непосредственно или через механический привод соединены с рулевыми приводами и осуществляют механическое управление ими по поступающим на сервопривод командным сигналам с преобразованием и усилением последних по мощности, используя энергию рабочей жидкости.
Рулевые приводы являются основными силовыми исполнительными механизмами СУ, а сервоприводы — промежуточными (вспомогательными) усилительными устройствами.
Основой для классификации гидравлических следящих приводов СУ рулями самолета является принцип действия основных элементов привода, взаимодействующих с элементами СУ и источниками ее энергоснабжения (табл. 11.2).
На рис. 11.6 приведены схемы обратимого и необратимого приводов.
Рис. 11.6. Обратимый и необратимый гидравлические следящие приводы:
а — обратимый; б — необратимый; 1 — входное звено; 2 — сравнивающее устройство;
3 — выходное звено; Rвх — усилие на входном звене; Rнаг — внешняя нагрузка на привод; Rдв — усилие, развиваемое гидродвигателем
Обратимый привод — гидравлический следящий привод, у которого усилие на выходном звене пропорционально усилию, приложенному к входному звену, и, наоборот, внешняя нагрузка, действующая на выходное звено такого привода, частично передается на его выходное звено. Этим достигается возможность "чувствовать" управление, т. е. ощущать различные усилия на рычаге управления самолетом в зависимости от угла отклонения рулевой поверхности, а также от скорости и высоты полета.
Необратимый привод — гидравлический следящий привод, у которого гидродвигатель полностью воспринимает нагрузку, действующую на его выходное звено; нагрузка с выходного звена на входное звено не передается. В этом случае в систему управления самолетом для имитации усилий на рычаге управления включается специальный механизм загрузки
Лекция 6
1.25 ГС управления уборкой и выпуском шасси.
1.26 ГС управления поворотом передней опоры.
1.27 Системы автоматического торможения.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1115; Нарушение авторских прав?; Мы поможем в написании вашей работы!