КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Характеристика дискретных элементов
|
|
|
|
Классификация дискретных устройств.
Контактные и бесконтактные элементы.
Характеристика дискретных элементов.
История развития дисциплины.
План.
Методы анализа и синтеза всех классов дискретных автоматов строят на базе алгебры логики. Начало алгебры логики было положено ирландским математиком Д. Булем (1815— 1864 гг.).
Теория дискретных устройств является сравнительно молодой и быстро развивающейся отраслью науки. Ее появление в 30-х годах нашего столетия связано с усложнением и совершенствованием релейных систем управления, когда возникла необходимость в их математическом описании. Новый стимул развития теория дискретных устройств получила в 50-х годах в связи с применением в устройствах управления полупроводниковой техники и вычислительных машин. В настоящее время разрабатываются вопросы теории, связанные с использованием микросхем большой степени интеграции, программируемых логических матриц, микропроцессоров и других достижений современной микроэлектроники.
Основы теории дискретных устройств начали закладываться в 1938—1940 гг., когда советский физик В. И. Шестаков, американский математик К. Шеннон и японский ученый А. Накашима доказали возможность использования булевой алгебры при анализе и синтезе контактных схем. Впервые же указал на такую возможность в 1910 г. русский физик П. Эрнефест.
Большое влияние на развитие теории дискретных устройств оказало создание электронных вычислительных машин (ЭВМ).
Информация, передаваемая между отдельными узлами (блоками) в системах автоматики, телемеханики и связи,отображается дискретными сигналами. Каждый сигнал: характеризуется определенным параметром, который можетиметь два значения: одно из них условно принимают за О, другое — за 1. Для физического представления информации применяют дискретные элементы, которые могут быть в двух состояниях: 0 или 1. Цифры 0 и 1 не дают никакой количественной оценки состояний элемента, они лишь обозначают эти состояния.
|
|
|
Как уже отмечалось, каждому дискретному сообщению соответствует свой дискретный сигнал, представляющий собой некоторую последовательность символов 0 и 1 определенной длины, например 101100111. Эту последовательность символов называют кодовым словом. Его образуют с использованием алфавита, состоящего из двух букв: 0 и 1, называемых соответственно логическим нулем и логической 1. Кодовое слово можно рассматривать как некоторое число в двоичной системе счисления. Следовательно, информация в системах автоматики, телемеханики и связи может быть представлена в виде двоичных чисел, т. е. -каждому дискретному сообщению должно соответствовать определенное число. Двоичные числа представляют в виде комбинации состояний дискретных элементов. Функциональный блок систем автоматики, телемеханики и связи есть совокупность дискретных элементов, соединенных надлежащий образом.
Под дискретным элементом будем понимать некоторую минимальную совокупность деталей, объединенных в общую схему для выполнения какой-либо функции и имеющую релейную характеристику (рис. 1.6). У элемента с такой характеристикой изменение входной величины х вызывает скачкообразное изменение выходной величины г, принимающей лишь два дискретных значения: 0 и 1. У реальных элементов всегда
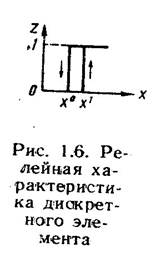

имеется некоторое различие значений входного параметра (Х1 и х°), при которых происходит изменение выходного параметра с 0 на 1 и обратно с 1 на 0.
Отношение входных параметров, соответствующих обратному и прямому изменениям выходной величины, называют коэффициентом возврата дискретного элемента
|
|
|

Чем ближе к единице значение /Св, тем меньше могут отличаться друг от друга значения входного параметра, соответствующие логическим 0 и 1. Градации между значениями входного параметра должны быть выбраны с таким расчетом, чтобы находящиеся в пределах норм колебания значений напряжений источников питания, сопротивлений резисторов, емкости конденсаторов, помехи не приводили к неправильной работе дискретного элемента. При высоком коэффициенте возврата легче обеспечить надежную работу дискретного элемента.
В качестве параметров (признаков) входных и выходных сигналов дискретного элемента, как правило, применяют: значение амплитуды тока или напряжения (большая амплитуда соответствует значению сигнала 1, малая амплитуда — 0); значение сопротивления (равенство сопротивления между двумя зажимами нулю вследствие того, что цепь замкнута накоротко, соответствует значению сигнала 1; равенство этого сопротивления бесконечности вследствие разомкнутой цепи соответствует значению сигнала 0).
Наряду с указанными выше параметрами в системах автоматики, телемеханики и связи используют частоту тока или частоту следования импульсов, время (продолжительность) отдельных посылок, число импульсов, фазу тока или напряжения. Параметры входных и выходных сигналов дискретного элемента могут быть одинаковыми или различными. Переход элемента из одного состояния в другое может происходить практически мгновенно или с некоторой задержкой (рис. 1.7).
Дискретные элементы могут реагировать на статические сигналы или не на сами входные сигналы, а только на их определенные изменения. Элементы второго типа называют реагирующими на переход. При анализе их работы под «сигналом» подразумевают изменение входных сигналов.
Дискретные элементы могут быть разделены на активные и пассивные. У активных элементов выходные сигналы создаются энергией специальных источников, а входные сигналы служат только для управления, как, например, у транзисторов и электромагнитных реле. В пассивных элементах выходной сигнал формируется энергией входных сигналов, как, например, у полупроводниковых диодов.
Дискретные элементы, способные сохранять свое состояние или выходной сигнал после прекращения действия входного сигнала, вызвавшего переход в это состояние, называют элементами памяти (элементами с фиксацией воздействия). Для перехода такого элемента в новое состояние требуется новое входное воздействие х1 или х° (рис. 1.8).
|
|
|
В общем случае дискретный элемент может быть представлен как n -полюсник, имеющий от 1 до п входов, на которые поступают входные сигналы х и от 1 до zвыходов. Дискретный элемент состоит из реагирующих органов, воспринимающих входные сигналы, исполнительных, выдающих выходные сигналы, и промежуточных, перерабатывающих и передающих воздействие от реагирующих органов к исполнительным. Данные органы могут быть или явно выражены, или совмещены. Состояние частей и деталей элемента характеризует его внутреннее состояние, которое в общем случае может принимать n состояний. Двухпозиционные элементы имеют два внутренних состояния, одно из которых обозначают О, а другое—1. Такие элементы называют двоичными. Многопозиционные элементы характеризуются наличием трех и более состояний. Последовательность перехода элемента из одного состояния в другое определяется свойствами самого элемента и последовательностью поступления сигналов на его входы. Например, многопозиционными дискретными элементами являются нейтрально-поляризованные реле, многопозиционные переключатели, шаговые искатели. Нейтрально-поляризованное реле может находиться в трех состояниях, соответствующих отсутствию напряжения на его обмотке, наличию напряжения положительной полярности и наличию напряжения отрицательной полярности.
Дискретные элементы обладают свойством направленности, т. е. передача сигналов возможна только от входа к выходу, в этом случае состояния входов и внутренние состояния элемента не зависят от выходных сигналов. Другим важным свойством элемента является разделительность входов и выходов, заключающаяся в том, что сигнал, поступивший на один из входов (выходов), не вызывает появления сигнала на других входах (выходах).
Все электрические дискретные элементы можно разделить на два класса: контактные и бесконтактные, отличающиеся конструкцией и принципом действия.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 2972; Нарушение авторских прав?; Мы поможем в написании вашей работы!