КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Плавание в стесненных водах
|
|
|
|
Использование вычислительной техники.
Использование специальной номограммы.
Использование карт в гномонической проекции.
Использование ортодромических поправок.
Способ устарел и в настоящее время не применяется из-за отсутствия нужных таблиц в современных пособиях.
Дуга большого круга изображается на картах в гномонической проекции прямой линией. Это позволяет, соединив прямой линией пункты отхода и прихода, убедиться, что проложенная ортодромия проходит в стороне от опасностей. Далее следует по измеренным с карты координатам отдельных точек ортодромии перенести дугу большого круга в виде отрезков локсодромий на меркаторскую генеральную карту.
При практическом выполнении необходимо:
• на карте в гномонической проекции соединить начальную и конечную точки перехода прямой линией;
• в качестве промежуточных взять точки пересечения этой линии с меридианами, долготы которых кратны 10°;
• измерить координаты промежуточных точек, перенести их на меркаторскую карту и соединить прямыми отрезками локсодромических курсов.
Способ устарел, применяется редко. Порядок работы с номограммой указан в ее описании.
Все работы по нанесению дуги большого круга на морскую навигационную карту в меркаторской проекции существенно облегчаются при использовании современной вычислительной техники. В настоящее время имеется достаточно прикладных программ, позволяющих решить эту задачу. Расчеты производятся с использованием формул сферической тригонометрии.
14.1 Подготовка к плаванию в узкостях
Под стесненными водами (узкостями) понимают акватории, в которых маневрирование судов ограниченно различными опасностями (рифами, мелями, банками, камнями и т. п.), лежащими в непосредственной близости от фарватеров и рекомендованных курсов.
|
|
|
К плаванию в таких водах выполняют особенно тщательную подготовку. Оценку предстоящего прохода стесненных вод проводят с учетом всей доступной информации - по навигационным и справочным картам, лоциям, рекомендациям для плавания и другим гидрографическим публикациям.
Внимательно изучают национальные правила плавания, распространяющиеся на стесненные воды. Полезно использовать информацию соответствующих судовых агентов, а также информацию от судовладельца, накопленную по рапортам капитанов судов посещавших данный район.
На картах и в плане перехода обозначают места:
• информации капитану о подходе к сложному участку;
• информации лоцманской станции о подходе судна (если планируют
брать лоцмана);
• перевода главного двигателя в маневренный режим;
• приема лоцмана.
Уточняют время подхода к узкости с учетом обеспечения безопасности его прохода. Капитан любого судна должен решить, в какое время суток ему наиболее безопасно преодолевать сложный для плавания участок.
Отмечают точку «не возврата» {no-return point, abort point), после прохода которой судно, в случае осложнения обстановки, не сможет возвратиться в открытое море.
Составляют дополнительный план действий в чрезвычайных обстоятельствах (contingency plan), в котором, например, предусматривают места дрейфа судна или якорной стоянки, или альтернативный путь, если основной фарватер будет закрыт и т.п.
Составляют схему информации станций контроля о своем движении в соответствии с правилами плавания в данном районе, рекомендациями в лоции, ALRS и извещениях мореплавателям.
Получают местный метеобюллетень с анализом и прогнозом погоды на сложный участок плавания.
Уточняют направление и скорость течения на предстоящий район перехода.
|
|
|
Проверяют соответствие осадки судна объявленной проходной осадке на предстоящем сложном участке. Регулируют дифферент, создавая, по возможности, оптимальный для данного судна. Учитывают, что дифферент на нос неблагоприятно сказывается на маневренные возможности судна, а значительный дифферент на корму может препятствовать обзору с навигационного мостика.
Если предстоит проходить под мостами, линиями электропередачи (проводами) проверяют высоту судна над ватерлинией (air draff).
Заполняют Перечни контрольных проверок (check list) готовности судна к плаванию в стесненных условиях и приему лоцмана, заверяют их подписью капитана. В судовом журнале записывают «Судно полностью изготовлено к плаванию в стесненных условиях в соответствии с чек-листом №...» и «Судно полностью изготовлено к приему лоцмана в соответствии с чек-листом №...».
Одновременно с детальным изучением района узкости производится подбор и подъем карт.
На карте отмечают приметные береговые ориентиры, необходимые для визуальных и РЛС обсерваций. Выделяют опасные секторы видимости и освещения маяков. Наносят на свободных местах карт данные о характере приливно-отливных явлений.
Наносят (рис. 14.1) ограждающие изолинии (расстояния, пеленги), ограничивающие участки акваторий, куда заходить судну опасно.
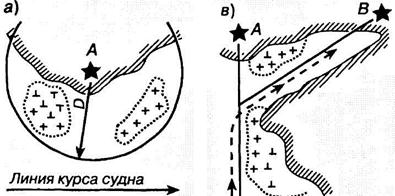
 Рис. 14.1 Ограждающие изолинии а)расстояния в)пеленги
Рис. 14.1 Ограждающие изолинии а)расстояния в)пеленги
Ограждающие пеленги должны быть, по возможности, параллельны направлению движения судна.
На особо опасные участки плавания в узкостях рекомендуется заблаговременно нанести сетки изолиний.
В зависимости от предполагаемых способов определения места судна сетки могут быть:
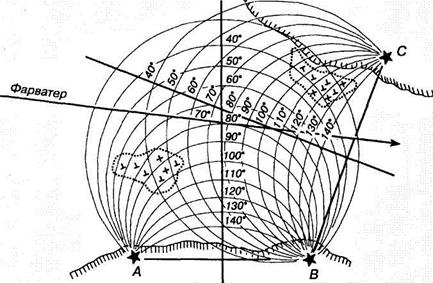
• гониометрические — для определения места судна по
горизонтальным углам (рис. 14.2);
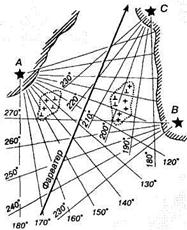
• азимутальные — для определения места по пеленгам (рис.
14.3);
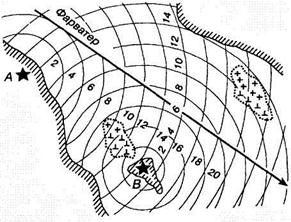
• стадиометрические — для определения места по
измеренным расстояниям (рис. 14.4);
азимутально-стадиометрические — для определения места судна комбинированными способами.
|
Рис. 14.2 Гониометрическая сетка
|
|
Рис. 14.3 Азимутальная сетка
Рис. 14.4 Стадиометрическая сетка
В районах, требующих для безопасности судна точного плавания по фарватерам и рекомендованным курсам, устанавливаются створы.
|
|
|
Для обеспечения безопасного плавания в узкости используют створы: ведущие, секущие, ограждающие.
Ведущие створы используются для удержания судна во время плавания точно по назначенной линии положения. Секущие створы дают
 линию положения, пересекающую ведущий створ, и указывают точки поворота на другой створ или дают пройденное расстояние по ведущему створу. Ограждающие створы ограждают какую-либо опасность, как и опасные пеленги.
линию положения, пересекающую ведущий створ, и указывают точки поворота на другой створ или дают пройденное расстояние по ведущему створу. Ограждающие створы ограждают какую-либо опасность, как и опасные пеленги.
Все эти данные, собранные заранее, дают судоводителю в любой момент четкую информацию о производстве обсерваций, счисления и управления судном при плавании в узкости.
На базе изученного и подобранного материала с особой тщательностью выполняется предварительная прокладка для
данного стесненного района плавания. Намеченные направления линии пути должны соответствовать рекомендациям лоций, или совпадать с направлениями створов, расположенных в узкостях. Над линией пути или под ней пишутся значения ПУ.
Точки начала и конца поворотов необходимо наносить с учетом маневренных элементов судна.
Необходимо установить скорость судна на различных участках, руководствуясь шириной, глубиной и извилистостью фарватера, а также местными правилами плавания, рассчитать продолжительность плавания на каждом курсе.
На берегу выбираются приметные ориентиры, на траверзе которых начинают повороты с учетом радиуса циркуляции судна. Если приметные ориентиры находятся по носу или по корме, то точки начала поворота задаются расстоянием до этих ориентиров (рис. 14.5).
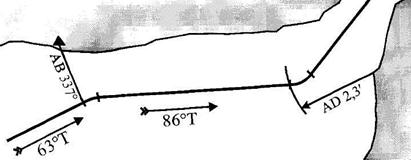
Рис. 14.5 Поворотные пеленг и дистанция
Эффективным средством является радиолокационный способ параллельной индексации, позволяющий непрерывно и довольно точно контролировать движение судна по заданному пути. Ориентиры для использования при параллельной индексации выбирают заранее во время составления плана перехода. Подробно этот способ оперативного контроля места судна будет рассмотрен позднее, в лекции, посвященной навигационному использованию РЛС. 14.2 Проводка судна в узкостях
|
|
|
Проводка судна по сложному в навигационном отношении участку осуществляется одновременно штурманским и лоцманским способами.
 Лоцманский способ (независимо от того есть или нет лоцман на борту) осуществляет капитан глазомерно. Этот способ требует хорошего знания района и действующих в нем правил плавания, курсов, расположения и характеристик навигационных средств обеспечения, ориентиров для удержания судна на заданном пути и для опознания мест поворота, характера глубин и величины допустимых отклонений от проложенного пути, влияния течения. Уверенного знания маневренных и инерционных характеристик своего судна. Если капитан не уверен твердо в знаниях района плавания по сложному участку или поведения судна при данной посадке и загрузке, то лучше обратиться к услугам лоцмана, даже если в данном районе лоцманская проводка не обязательна.
Лоцманский способ (независимо от того есть или нет лоцман на борту) осуществляет капитан глазомерно. Этот способ требует хорошего знания района и действующих в нем правил плавания, курсов, расположения и характеристик навигационных средств обеспечения, ориентиров для удержания судна на заданном пути и для опознания мест поворота, характера глубин и величины допустимых отклонений от проложенного пути, влияния течения. Уверенного знания маневренных и инерционных характеристик своего судна. Если капитан не уверен твердо в знаниях района плавания по сложному участку или поведения судна при данной посадке и загрузке, то лучше обратиться к услугам лоцмана, даже если в данном районе лоцманская проводка не обязательна.
При выполнении проводки лоцманским способом нужно помнить, что в светлое время и при хорошей видимости безопасность плавания всегда выше, чем в темное время суток или при пониженной видимости.
Ориентиры для поворотов нужно выбирать достаточно приметные и расположенные ближе к траверзу судна, что повышает точность опознания места начала поворота. Считается, что погрешность визуальной оценки расстояния у опытного судоводителя составляет примерно ±10% от измеряемой величины. Начинать поворот надо заблаговременно, имея запас в кладке руля, чтобы вовремя оценить движение судна и иметь возможность увеличить или уменьшить скорость поворота.
Во время проводки судна в стесненном для плавания районе капитану нельзя отвлекаться другими делами, полностью уделяя внимание управлению судном. Рекомендуется, если позволяют обстоятельства, придерживаться заранее проложенного пути, возвращаясь к нему в случае отклонений.
Штурманский способ - вспомогательный. Он с некоторым запаздыванием выполняет контроль движения судна с помощью визуальных или радиолокационных способов определения места. Одновременно идет контроль за движением судна по электронной карте.
На все время плавания в мелководных районах включают эхолот. Показания глубин должны быть постоянно в поле зрения вахтенного помощника.
О полученном месте судна и величине его отклонения от заданного пути вахтенный помощник регулярно докладывает капитану. Он также докладывает капитану о подходе к точке начала поворота и значении предстоящего после поворота курса.
О любых сомнениях, связанных с положением судна на заданном курсе, вахтенный помощник должен немедленно доложить капитану. Обо всех опасно движущихся судах или важных изменениях в навигационной обстановке впередсмотрящий матрос и вахтенный помощник капитана четко и своевременно докладывают капитану, не полагаясь на то, что капитан видит их сам.
 14.3 Плавание в районах регулирования движения судов
14.3 Плавание в районах регулирования движения судов
Увеличение плотности и интенсивности движения судов на основных морских путях, в международных проливах, на подходах к крупным портам привело к формированию мощных судопотоков, усилению взаимосвязей между движущимися судами, переходу от плавания одиночного судна к групповому плаванию судов.
Система организационных и технических мероприятий для упорядочения движения судов в потоке с целью повышения безопасности мореплавания, достижения наибольшей надежности и эффективности транспортной системы в заданном районе называется управлением потоком судов.
Методы управления потоком судов подразделяются на активные и пассивные.
Активные методы заключаются в регулировании и управлении движением судов в районе с помощью береговых РЛС, постов регулирования движения судов, систем управления движением судов.
Пассивные методы предполагают целенаправленное воздействие на судопоток с помощью системы правил, введения установленных путей, запретных для плавания районов, системы радиолокационного контроля за судоходством и информации о движении судов в районе.
14.3,1 Плавание в системах разделения движения (СРД) судов
Эффективным средством пассивного управления судопотоками является система разделения движения (СРД) — разделение встречных потоков судов посредством установления зон и/или линий разделения и полос движения. Наиболее часто используются СРД линейного типа (рис. 14.6).
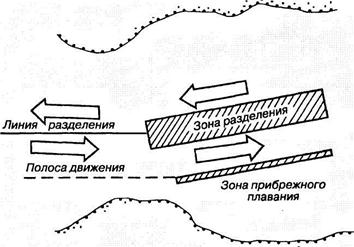
Рис. 14.6 СРД линейного типа
Секторное разделение движения используется там, где сходятся потоки судов, идущих с различных направлений (рис. 14.7).
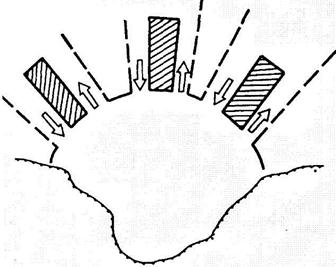
Рис. 14.7 СРД секторного типа
В узловых точках схождения потоков вводятся районы кругового движения или районы повышенной осторожности плавания.
Полосы движения должны прокладываться так, чтобы оптимально использовать имеющиеся глубины; максимальная ширина полос движения и зон разделения должна устанавливаться исходя из точностных возможностей способов определения места.
Единственным международным органом, ответственным за установление СРД, является ИМО. Однако правительства прибрежных государств вправе самостоятельно вводить СРД в водах, находящихся под их юрисдикцией, информируя об этом ИМО и заблаговременно оповещая всех через систему "Извещений мореплавателям". Правила плавания в национальных СРД устанавливает прибрежное государство и они могут существенно отличаться от Правила 10 МППСС. Даже если объявленная СРД не одобрена ИМО и не является обязательной для исполнения, хорошая морская практика требует от судоводителя следовать в соответствии с этой системой до тех пор, пока другие более важные обстоятельства не заставят его изменить это решение.
В соответствии с Правилом 10 судно должно в общем случае входить в полосу движения СРД или покидать ее на конечных участках, но если судно покидает полосу движения или входит в нее с любой стороны, оно должно делать это под возможно меньшим углом к общему направлению потока движения. При плавании вблизи конечных участков СРД необходимо соблюдать особую осторожность, так как движение судов здесь не является упорядоченным. Судно, не использующее СРД, должно держаться от нее на возможно большем расстоянии.
При предварительной прокладке путь судна рекомендуется прокладывать по середине полосы движения, если справа по ходу за границей полосы движения находится зона прибрежного плавания или опасный район. Если же за правой границей полосы движения опасности нет, то путь судна лучше располагать в 2/3 ширины полосы движения от зоны разделения.
Судно, если оно не пересекает СРД, не входит в полосу движения или не выходит из нее, не должно входить в зону разделения или пересекать линию разделения движения, кроме ситуаций крайней необходимости:
• для избежания непосредственной опасности;
• при лове рыбы;
• при гидрографических работах в пределах зоны разделения.
Судно должно избегать пересечения полос движения, но если оно
вынуждено, то должно делать это, насколько возможно, курсом под прямым углом к общему направлению потока движения.


 15. Использование РЛС в задачах навигации
15. Использование РЛС в задачах навигации
15.1 Общие сведения
Судовая навигационная РЛС (НРЛС) обеспечивает возможность измерять расстояния, пеленги и курсовые углы на объекты и применяется для определения места судна при самых разнообразных условиях плавания.
НРЛС представляют собой импульсные радиотехнические средства, работа которых основана на использовании зависимости между временем распространения радиосигнала и навигационным параметром. Такая РЛС периодически излучает кратковременные импульсы колебаний СВЧ, а в промежутке между излучениями принимает отраженные от объектов импульсные сигналы, запаздывающие на время

где D — расстояние до объекта;
с — скорость распространения радиоволн.
По измеренному интервалу времени рассчитывается дальность до объекта.
Направление (азимут) на объект определяется с помощью антенны направленного действия. При повороте антенны в горизонтальной плоскости, когда цель окажется в пределах ее диаграммы направленности, на вход приемника РЛС поступают отраженные сигналы и указатель поворота антенны покажет направление на объект.
Энергия излучается антенной в виде очень коротких импульсов. Следующий импульс не передается в течении времени, необходимого для достижения предыдущим цели и возвращения в пределах установленной шкалы измерений дистанции.
Продолжительность или длина отдельного импульса называется длина импульса, продолжительность импульса или ширина импульса.
Комбинации импульса и паузы повторяется с очень высокой частотой, до 1 000 в секунду.
Импульс энергии, составляющий порцию излучения, распространяется в пространстве в виде лепестка. Кроме основного, имеются и нежелательные боковые лепестки, которые возникают в связи с несовершенством конструкции антенны.
Под горизонтальной и вертикальной диаграммой направленности понимают сектор излучения, где сконцентрирована половина мощности, излучаемой антенной.



Рис. 15.1 Диаграммы направленности
У современных НРЛС ширина лепестка вертикальной диаграммы направленности составляет около 20°, горизонтальной - 0,7° -f 2°.
Разрешающая способность НРЛС по дистанции определяется длиной импульса, по углу - характеристикой горизонтальной диаграммы направленности.
15.2 Факторы, влияющие на формирование РЛС изображения («картинку»)
Дифракция - это явление огибания волной преграды. Из-за дифракции можно наблюдать некоторую освещенность позади преграды или цели радарного луча. Эффекты дифракции тем больше, чем ниже частота излучения. Таким образом, радарный луч более низкой частоты облучает больше теневой области позади преграды, чем луч радара более высокой частоты или с более короткой длиной волны.
Ослабление - рассеивание и поглощение энергии в радарном луче при прохождении через атмосферу. Ослабление больше для более высоких частот. У большинства НРЛС используется две частоты излучения: с длиной волны Зсм и с длиной волны 10 см:
• 3 см - лучше «картинка», сильнее ослабление;
• 10 см - хуже «картинка», меньше ослабление.
Отраженное эхо намного слабее чем переданный импульс, характер возвращения сигнала к источнику подобен характеристике распространения сигнала. Сила этого эхо зависит от количества переданной энергии, размера и отражающих свойств цели.
Высота антенны РЛС и высота цели - определяют дальность обнаружения цели

где На — высота антенны РЛС над уровнем моря, метры;
ho — высота отражающей части объекта над уровнем моря, метры; Dрлс — дальность обнаружения цели, мили.
При использовании РЛС необходимо учитывать, что сильные осадки (ливни, град, снежные заряды) уменьшают дистанцию обнаружения объектов на 30—50%, а наличие качки снижает точность измерений. В этих условиях наблюдение необходимо вести при длине волны РЛС 10 см.
На условия наблюдения также влияет волнение моря, вызывающее засветку центральной части экрана РЛС отражениями от волн.
15.3 Возможности настройки РЛС «картинки»
· Обеспечиваются регулировками:
· яркости;
· усиления;
· ВАРУ (SEA);
· дифференцирующей цепочки (RAIN).
С помощью регулировок яркости и усиления добиваемся контрастной и четкой «картинки».
Устранение помех:
• Засветка центра шкалы от волнения моря - ВАРУ;
• Появление ложных целей в теневом секторе РЛС
 - усиление.
- усиление.
· «Расползание» эхо сигнала от близкорасположенной цели
 - усиление;
- усиление;
·
· Вторичный эхо сигнал от цели

|
-неправильное использование
усиления и ВАРУ,
неправильное использование
усиления и ВАРУ,
- правильное использование
усиления и ВАРУ;
• Помехи из-за атмосферных осадков - дифференцирующей цепочкой (RAIN).
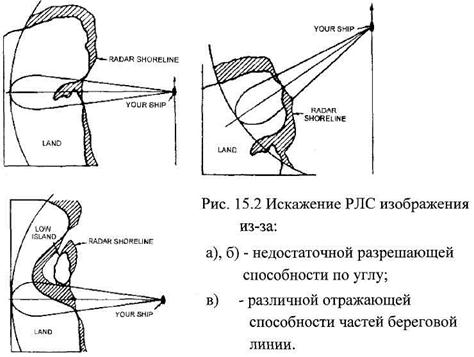
15.4 Искажение РЛС «картинки» береговой черты
Происходит из-за различной отражающей способности частей береговой линии, ограничений, связанных с разрешающей способностью РЛС по дистанции и по углу, способом формирования РЛС изображения.
|
| Рассмотрим соотношение реальной навигационной обстановки и ее РЛС изображения на примере. |
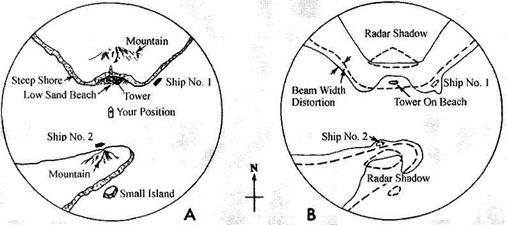
Рис. 15.3 Реальная навигационная обстановка и ее РЛС изображение
На рис. А изображена береговая черта и суша за ней. Имеется стальная башня на низком песчаном берегу и два судна на якоре вблизи берега. На рис. В сплошной линией показано РЛС-изображение береговой черты, пунктирной линией ее действительное положение. Относительно РЛС «картинки» следует отметить следующее:
1. Низкий песчаный берег не отображается радаром.
2. Башня на низком песчаном берегу отображается, однако имеет вид судна в бухточке. На близкой дистанции изображение низкого берега может быть получено, но башня тогда будет не видна без уменьшения усиления сигнала РЛС.
3. Радиолокационная тень находится за обеими горами. Искажения изображения из-за радиолокационной тени во многих случаях повинны за ошибки в восприятии РЛС изображения береговой черты. Маленький островок не виден из-за радиолокационной тени.
4. Искажение береговой черты больше в тех местах, где угол между направлением излучения РЛС и береговой линией меньше. Обратите внимание на изображение полуострова - в западной части искажения больше.
5. Судно № 1 выглядит как маленький полуостров - из-за недостаточной разрешающей способности по дальности и по углу.
6. Судно № 2 также поглощается береговой чертой и выглядит как ее изгиб. Уменьшением усиления можно добиться того, что судно появится на РЛС «картинке». Однако тогда будет неясно, как далеко оно находится от берега.
На точность определения места судна с помощью РЛС непосредственно влияют искажения за счет размеров ориентиров и углов их облучения РЛС. При определении места по радиолокационным пеленгам и дистанциям лучше использовать точечные ориентиры, которые на карте и на экране РЛС изображаются в виде точки. Пространственные ориентиры целесообразно использовать только для обсерваций по измеренным радиолокационным дистанциям до участков, облучаемых РЛС под прямым углом.
15.5 Использование радиолокационных маяков-ответчиков
Наилучшими РЛС ориентирами являются радиолокационные маяки-ответчики (РЛМк).
Радиолокационные маяки-ответчики представляют собой устройства, излучающие электромагнитные импульсы в диапазоне судовых РЛС в ответ на ее запросный сигнал.
Они предназначены для создания активных радиолокационных ориентиров, обеспечивающих уверенное радиолокационное опознавание и
определение места судна по пеленгу и расстоянию до них.
Радиолокационными маяками-ответчиками оборудуются районы
интенсивного плавания, сложные в навигационном отношении.
При отсутствии запрашивающих импульсов передатчик РЛМк отключается и маяк находится в режиме ожидания. РЛМк включается в работу после поступления двух последовательных запрашивающих импульсов, при условии, что второй прошел в приемник не позже определенного интервала времени после первого. Этим обеспечивается предупреждение срабатываний, вызванных случайными сигналами.
С учетом атмосферной рефракции радиоволн наибольшая дальность действия РЛМк в милях рассчитывается по формуле

|
 где Н — высота РЛМк от уровня моря, h — высота антенны судовой РЛС, м.
где Н — высота РЛМк от уровня моря, h — высота антенны судовой РЛС, м.
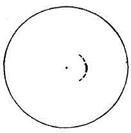
Сигнал РЛМк имеет на экране РЛС вид прерывистой линии, соответствующей опознавательному сигналу маяка, или сплошной непрерывной линии, расположенной радиально за эхо-сигналом маяка-ответчика на расстоянии нескольких сотен метров.
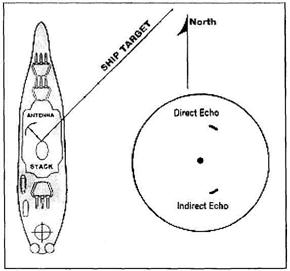
Особенности изображения РЛМк рассмотрим на рисунке

|
Сигнал РЛМк несколько сдвинут относительно его действительного места по направлению навстречу вращению антенны.
Рис. 15.4 Изображение РЛМк на экране
РЛС 15.6 Задачи, решаемые НРЛС
НРЛС позволяет решать следующие навигационные задачи:
• определение координат места судна по точечным и пространственным ориентирам путем измерения радиолокационных пеленгов и дистанций;
• опознание побережья и глазомерная ориентировка при плавании в стесненных условиях;
• обнаружение надводных навигационных опасностей, плавучего льда, ливневых облаков и снежных зарядов;
• определение маневренных элементов судна.
Навигационные РЛС, входящие в состав автоматизированных навигационных комплексов или сопрягаемые с САРП, позволяют, кроме того:
• осуществлять обсервационную прокладку пути судна при плавании
в стесненных условиях и в прибрежной зоне;
• непосредственно измерять элементы суммарного сноса судна.
К недостаткам навигационных РЛС, влияющих на безопасность судовождения, относятся:
• наличие теневых секторов и минимальной дистанции, в пределах
которых объекты не обнаруживаются;
• специфическое искажение объектов на экране РЛС относительно их изображения на морской навигационной карте и затруднение их опознавания;
• ограниченность дистанций обнаружения объектов географическим фактором радиолокационной видимости, зависимость от отражающих способностей и размеров объектов, а также зависимость возможности обнаружения от маскирующего влияния осадков ливневого характера;
• относительно низкая точность радиолокационного пеленгования.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 6751; Нарушение авторских прав?; Мы поможем в написании вашей работы!