КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Построение системы управления преобразователей частоты
|
|
|
|
Основным элементом систем управления современных преобразователей частоты является специализированный микроконтроллер или цифровой сигнальный процессор (DSP). Построение системы управления на базе DSP обусловлено необходимостью произведения большого объема сложных вычислений в режиме реального времени для реализации современных алгоритмов управления. В наибольшей степени это критично для бездатчиковых систем векторного управления.
Система управления может быть одноили многопроцессорной. Однопроцессорные системы обладают рядом существенных недостатков: к микроконтроллеру предъявляются повышенные требования по наличию встроенных периферийных модулей и портов ввода-вывода, по быстродействию и объему памяти; значительно усложняется разработка программного обеспечения. Однако при решении задач управления невысокой сложности достоинством однопроцессорных систем является простота аппаратной и программной реализации.
В настоящее время большинство преобразователей строятся на двухпроцессорной основе. Первый процессор (ЦП1) выполняет основные функции преобразователей частоты (реализация алгоритмов управления инвертором, выпрямителем, опрос датчиков и т. д.), второй (ЦП2) обеспечивает работу пульта управления, связь с системой верхнего уровня и другие сервисные функции. Следует отметить, что распределение функций между микроконтроллерами может быть произведено и другим способом.
Достоинства двухпроцессорной системы по сравнению с однопроцессорной — снижение требований к ЦП1 и ЦП2 по встроенной периферии, быстродействию и объему памяти; возможность применения единого интерфейса для связи центрального контроллера с пультом управления и с системой автоматизации верхнего уровня; значительное упрощение разработки программного обеспечения для каждого из контроллеров.
|
|
|
Управление драйверами инвертора осуществляется посредством формирования шестиканального ШИМ-сигнала с автоматическим добавлением «мертвого времени». В большинстве микроконтроллеров модуль ШИМ реализован аппаратно. Для получения формы выходного напряжения, близкой к синусоидальной (что особенно критично при скалярном управлении), может использоваться программная или аппаратная коррекция «мертвого времени». Также в большинстве случаев реализуется аппаратная блокировка сигналов ШИМ в случае аварии.
Управление преобразователем может осуществляться с помощью пульта (возможно, удаленного), дискретных или аналоговых входов.
Преобразователи конструктивно строятся по модульному принципу, позволяющему вводить в них дополнительные функциональные модули, которые в сочетании со встроенными программными средствами позволяют получить различную конфигурацию электропривода, отвечающего требованиям заказчика, — от простейших разомкнутых до точных замкнутых систем позиционирования. Как правило, такие модули (платы) расширения содержат в своем составе аналоговые и дискретные входы и выходы, а также интерфейсы связи.
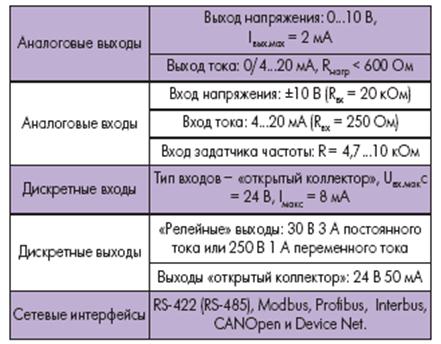
Таблица 1. Типовые характеристики плат расширения
Все аналоговые входы и выходы на платах расширения имеют встроенный источник питания и обычно выполняются гальванически развязанными от системы управления и дискретных входов и выходов. Функции, выполняемые аналоговыми входами и выходами, программируются с пульта управления. Наиболее часто аналоговые входы служат для подключения датчиков обратной связи по технологическим параметрам (для этих целей, как правило, предусматривается один вход напряжения и один вход тока). В большинстве преобразователей частоты имеется также вход для подключения потенциометра, используемого в качестве задатчика выходной частоты (для преобразователей частоты со скалярным управлением) или частоты вращения ротора электродвигателя (для преобразователей частоты с векторным управлением), при этом для питания задатчика частоты используется встроенный источник питания (как правило, 10 В). Возможно также наличие дополнительного входа для подключения датчика температуры двигателя (терморезистора). Аналоговые выходы служат для индикации одного из параметров состояния преобразователя частоты (например, текущей выходной частоты или расчетного значения момента на валу двигателя). Возможность подключения к выходам как вольтметров, так и амперметров достигается за счет наличия выхода напряжения и выхода тока. Выходные аналоговые сигналы формируются с помощью ЦАП (как правило, 10-битных); в отдельных случаях выходное напряжение формируется методом широтно-импульсной модуляции.
|
|
|
Дискретные входы и выходы на платах расширения используются для подключения внешних управляющих сигналов, поступающих с электромагнитных реле, а также для формирования сигналов управления такими реле.
Обычно в преобразователях частоты имеется от четырех до восьми дискретных входов типа «открытый коллектор», выполняющих следующие функции: выбор одной из трех выходных частот (или скоростей вращения ротора), управление отключением и реверсом, аварийное отключение преобразователей частоты. Все дискретные входы выполняют гальванически развязанными от системы управления.
Дискретные выходы можно разделить на две категории: силовые («релейные») выходы для управления внешними электромагнитными реле и выходы типа «открытый коллектор» для работы с внешними логическими схемами. Платы расширения обычно содержат два релейных выхода, имеющих пару нормально замкнутых и пару нормально разомкнутых контактов, а также четыре выхода типа «открытый коллектор». Функции выходов можно запрограммировать с пульта управления; обычно это: готовность, перегрузка, авария, выход на заданную частоту. Все дискретные выходы гальванически развязаны от системы управления, при этом релейные выходы развязаны между собой, а выходы типа «открытый коллектор» имеют общий нулевой сигнал.
|
|
|
Для построения систем с обратной связью по скорости в преобразователях частоты предусматривают входы для подключения датчика скорости типа «энкодер». Модуль сопряжения с датчиком скорости может входить в стандартную поставку преобразователей частоты или выполняться в виде платы расширения. Для питания дискретных входов и датчика скорости используется встроенный источник питания (обычно 24 В).
Преобразователи легко встраиваются в современные системы автоматизации. Широко используется управление в реальном времени несколькими преобразователями, для чего предлагаются решения с различными интерфейсами связи и топологиями сети. Большинство преобразователей частоты комплектуется стандартным интерфейсом RS-422 или RS-485. При этом взаимодействие осуществляется с использованием протоколов Modbus или Profibus, или их упрощенных модификаций. При использовании модулей расширения доступны дополнительные интерфейсы (например, CAN) и протоколы (Interbus, CANOpen, DeviceNet).
Как правило, преобразователи частоты в своем составе имеет пульт управления, который располагается на лицевой панели корпуса преобразователя. Пульт содержит несколько специализированных кнопок, в отдельных случаях может присутствовать цифровая клавиатура. Вывод информации осуществляется посредством одно- или двухстрочного специализированного ЖКИ или нескольких семисегментных индикаторов, а также светодиодов, отображающих режимы работы. На этапе ввода преобразователей частоты в эксплуатацию пульт служит для конфигурирования преобразователя и настройки соответствующих параметров; во время работы — для наблюдения за параметрами рабочего режима. В процессе обслуживания на индикаторе отображается информация о возникших неисправностях, что обеспечивает возможность постоянного контроля состояния электропривода. Пульт управления, как правило, выполняется съемным, что позволяет подключать его к преобразователям частоты только при необходимости и использовать один пульт для нескольких преобразователей.
Для хранения настроек системы, калибровочных параметров, журнала аварий и другой информации используется дополнительная энергонезависимая память. Часто она выполняется на основе микросхем Flash-памяти (как правило, с последовательным интерфейсом I2C или SPI). Кроме того, многие микроконтроллеры и DSP имеют возможность сохранения данных во внутренней энергонезависимой памяти.
Борис Карлов
Евгений Есин
Силовая электроника №1,2004
Источник: www.vfd.com.ua
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1012; Нарушение авторских прав?; Мы поможем в написании вашей работы!