КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Элементарная работа силы на возможном перемещении
Возможным перемещением точки называется такое бесконечно малое (элементарное) мысленное перемещение, которое допускается в рассматриваемый момент времени наложенными на точку связями.
Таким образом, возможные перемещения - это перемещения, допускаемые связями. Для каждого возможного положения системы в момент времени t существует бесчисленное множество возможных перемещений. Обозначать возможные перемещения будем символом δ.
Действительным перемещением точки называется бесконечно малое перемещение под действием внешних сил в соответствии с законом движения и уравнением связи. Обозначать действительные перемещения будем символом d, например,  на рисунке.
на рисунке.
При действительном движении системы в момент времени t реализуется одно из возможных перемещений. Для груза, расположенного на наклонной плоскости (рис. 4), действительное и возможное перемещения совпадают, т.е. dS=δS.
В общем случае система может иметь несколько или бесконечно много возможных перемещений. Вследствие уравнений связей, наложенных на систему, не все возможные перемещения являются независимыми.
Число независимых возможных перемещений называют числом степеней свободы системы.
Рассмотрим пример материальной точки. Материальная точка имеет одну степень свободы, если она может перемещаться только вдоль некоторой прямой или кривой; две степени свободы, если она принуждена остаться в плоскости или на заданной поверхности. Материальная точка, свободно движущаяся в пространстве, имеет три степени свободы.
Две материальные точки, связанные между собой невесомым жестким стержнем, имеют пять степеней свободы, т.к. первую точку можно считать свободной, тогда как вторая должна находиться на шаровой поверхности, описанной вокруг первой точки радиусом, равным длине стержня.
В случае N материальных точек, на координаты которых наложено r уравнений связи, число степеней свободы K вычисляется
К = ЗN-r.
При бесконечном множестве материальных точек, связанных бесконечным множеством уравнений связи, подсчет числа степеней свободы невыполним. Как нужно поступать в таких случаях, рассмотрим на примере твердого тела.
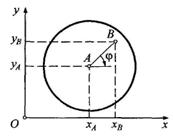 Рассмотрим свободно движущееся абсолютно твердое тело в плоскости. Выберем любую точку тела, например точку А(хА, уА... Эту точку назовем полюсом. Положение полюса А определяется двумя числами - координатами. Однозначно определить положение тела по координатам одного полюса нельзя, поскольку тело может вращаться вокруг этого полюса. Следовательно, нужно определить еще одну точку, например точку В(хВ, ув). Тогда, положение тела будет определяться четырьмя числами, координатами полюса А и точки В - (xа, уА, ув, хв).
Рассмотрим свободно движущееся абсолютно твердое тело в плоскости. Выберем любую точку тела, например точку А(хА, уА... Эту точку назовем полюсом. Положение полюса А определяется двумя числами - координатами. Однозначно определить положение тела по координатам одного полюса нельзя, поскольку тело может вращаться вокруг этого полюса. Следовательно, нужно определить еще одну точку, например точку В(хВ, ув). Тогда, положение тела будет определяться четырьмя числами, координатами полюса А и точки В - (xа, уА, ув, хв).
Расстояние между полюсом А и точкой В (отрезок АВ) величина постоянная для абсолют но твердого тела и теорема Пифагора связывает координаты этих точек между собой. Поэтому эти координаты не свободны, а на них наложена одна стационарная голономная связь, уравнение которой имеет вид
(хв-хА)2+(ув-уА)2=АВ2.
Вычислим число независимых параметров, определяющих положение тела в плоскости: К= 4 - 1 = 3. Получили, что твердое тело в плоскости имеет три степени свободы. В пространстве твердое тело имеет шесть степеней свободы.
Число независимых параметров равно числу степеней свободы системы. Каждая новая связь будет на единицу уменьшать число степеней свободы, следовательно, и число независимых параметров, определяющих положение системы. Независимые параметры, которые полностью определяют положение системы в пространстве, называют обобщенными координатами.
Независимые между собой параметры {координаты), число которых равно числу степеней свободы системы и которые однозначно определяют ее положение, называют обобщенными координатами системы (в общем виде их обозначают буквой qi).
Эти обобщенные координаты имеют вполне определенный геометрический смысл. Они вообще могут отличаться от декартовых координат, но могут также и включать в свое число одну или несколько декартовых координат. Например, твердое тело в плоскости имеет три степени свободы и его положение можно описывать следующими тремя обобщенными координатами: q1=xА,,q2 = уА, q3 =φ, здесь угол φ - угол, который составляет отрезок АВ с осью Ох. В качестве обобщенных координат можно выбрать параметры, имеющие разные размерности.
Отметим, что голономные системы характеризуются тем, что для них число степеней свободы всегда равно числу независимых параметров, необходимых для определения положения системы.
|
Дата добавления: 2014-01-20; Просмотров: 921; Нарушение авторских прав?; Мы поможем в написании вашей работы!