КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Величина определяется по формуле
|
|
|
|
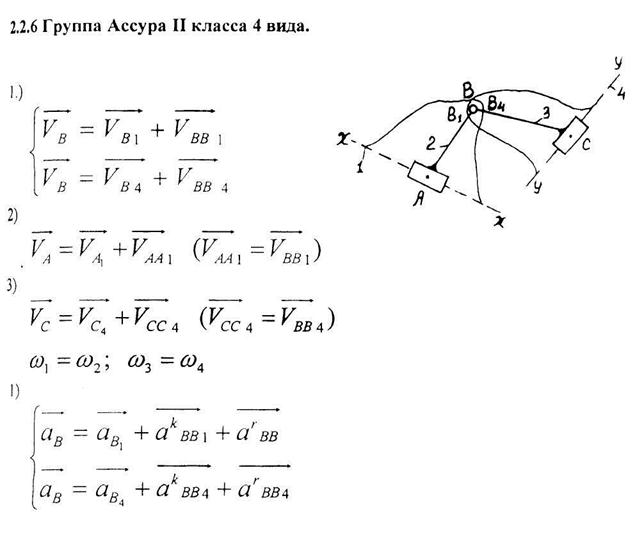
Для удобства графического построения плана скоростей всех звеньев группы, иногда план условно повертывают в одном и том же направлении на угол. Тогда векторы относительно скоростей и будут II ВС и DC.
Рассматривая  плана скоростей и
плана скоростей и  CFD на звене, можно видеть, что отрезки сf, fd,dc на плане скоростей соответственно
CFD на звене, можно видеть, что отрезки сf, fd,dc на плане скоростей соответственно  к отрезкам (CF), (FD),(DC) на схеме
к отрезкам (CF), (FD),(DC) на схеме
т.е.  на плане скоростей изображающий относительные скорости
на плане скоростей изображающий относительные скорости  группы на ее схеме и повернуты относительно его на угол, в
группы на ее схеме и повернуты относительно его на угол, в . Это свойство подобия фигуры относительных скоростей на плане скоростей фигуре звена на схеме механизма позволяет определять скорости любых точек этого звена не из уравнений, а графически, построением подобных фигур.
. Это свойство подобия фигуры относительных скоростей на плане скоростей фигуре звена на схеме механизма позволяет определять скорости любых точек этого звена не из уравнений, а графически, построением подобных фигур.
Для проверки правильности графического построения подобных фигур на схеме и на плане скоростей: При обходе контура звена по часовой стрелке на схеме например CDF, должно совпадать в том же порядке на плане скоростей: cdf
При определении ускорений группы II класса первого вида, известны векторы  и
и  полных ускорений точек В и D. Для определения ускорения ас точки «С», как и для определения скорости
полных ускорений точек В и D. Для определения ускорения ас точки «С», как и для определения скорости  ,точки «С», рассматриваем ее движение как сложное, состоящее из переносного со скоростями и ускорениями т. В и D и относительного вращательного вокруг этих точек. Тогда векторные уравнения для определения ускорения точки С
,точки «С», рассматриваем ее движение как сложное, состоящее из переносного со скоростями и ускорениями т. В и D и относительного вращательного вокруг этих точек. Тогда векторные уравнения для определения ускорения точки С
 ,
,  (5.5)
(5.5)
где  и
и  нормальные ускорения в относительном движении
нормальные ускорения в относительном движении
 и
и  - тангенциальные ускорения
- тангенциальные ускорения
Решая совместно уравнения получаем
 (5.6)
(5.6)
 и
и  - известны
- известны
Масштаб: 1мм -  (м/с2)
(м/с2)
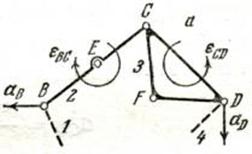
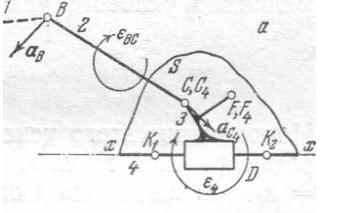
Кинемат. схема II класс 1 вид
План ускорений II класс 1 вид
План скоростей предполагается построенным, т.е. известны скорости всех звеньев, тогда. Векторы нормальных ускорений  ,
,  в относительном движении может быть определены:
в относительном движении может быть определены:
|
|
|
 ;
; 
Скорости  и
и  и угловые скорости
и угловые скорости  и
и  могут быть определены по построенному плану скоростей, длины l2 и l3 звеньев 2 и 3 определяют по схеме подставляя в полученные равенства длины из плана скоростей в масштабе
могут быть определены по построенному плану скоростей, длины l2 и l3 звеньев 2 и 3 определяют по схеме подставляя в полученные равенства длины из плана скоростей в масштабе  и со схемы
и со схемы  , получаем
, получаем
 ;
;  (5.7)
(5.7)
где отрезки (вс) и (dc) взяты из плана скоростей.
В качестве полюса плана выбираем точку « » и откладываем отрезки (
» и откладываем отрезки ( ) и (
) и ( )- в масштабе
)- в масштабе  ускорений точек В и D. Далее по уравнениям (5.7) вычисляем величины ускорений
ускорений точек В и D. Далее по уравнениям (5.7) вычисляем величины ускорений  и
и  и откладываем из точки в и d отрезки в n2 и dn3, и представляющие в масштабе эти ускорения. Из полученных точек n2 и n3 проводим прямые в направлении векторов тангенциальных ускорений
и откладываем из точки в и d отрезки в n2 и dn3, и представляющие в масштабе эти ускорения. Из полученных точек n2 и n3 проводим прямые в направлении векторов тангенциальных ускорений  ,
,  перпендикулярно ВС и СD. Точка пересечения этих прямых и даст конец вектора
перпендикулярно ВС и СD. Точка пересечения этих прямых и даст конец вектора  полного ускорения точки С, т.е.
полного ускорения точки С, т.е.  . Построенные фигуры
. Построенные фигуры  и
и  носят название планов ускорений звеньев 2 и 3, а вся фигура
носят название планов ускорений звеньев 2 и 3, а вся фигура  - называется планом ускорений группы BCD. Точка
- называется планом ускорений группы BCD. Точка  - называется началом или полюсом плана ускорений.
- называется началом или полюсом плана ускорений.
Соединив точки «в» и «d» плана с точкой «С», получим векторы полных относительных ускорений  и
и  . Имеем:
. Имеем:  =
= ;
; 
Модули угловых ускорений:  ;
;  (5.8)
(5.8)
звеньев ВС и CD
Подставляя соответствующие отрезки взятые из ускорений в равенство, получаем
 ;
; 
Для определения ускорения какой-либо точки Е, лежащей на оси звена ВС воспользуемся уравнением:
Как известно из теоремы механики при вращательном, плоском движении звена около некоторой точки, ускорения всех точек звена пропорциональны радиусом-вектором, соединяющим исследуемые точки центром вращения, направления этих ускорений образуют с этими радиусами постоянный угол  , определяемый из уравнения tg
, определяемый из уравнения tg =
= , где
, где  -есть угловое ускорение звена, а
-есть угловое ускорение звена, а  - угловая скорость звена.
- угловая скорость звена.
Т.к. относительное движение звена 2 около точки В есть движение вращательное, то, очевидно, что относительные ускорения всех точек звена 2 будут образовывать с радиусами- векторами, выходящими из точки В, постоянный угол , удовлетворяющий соотношению
|
|
|
 , следовательно, направление вектора
, следовательно, направление вектора  должно совпадать на плане ускорений с направлением вектора
должно совпадать на плане ускорений с направлением вектора  , т.е. с направлением отрезка (вс), величина же отрезка (вl) изображающего на плане ускорений ускорение
, т.е. с направлением отрезка (вс), величина же отрезка (вl) изображающего на плане ускорений ускорение  , определяется из условия пропорциональности ускорений радиусом-вектором, т.е.
, определяется из условия пропорциональности ускорений радиусом-вектором, т.е.
 ;
; 
Для определения ускорения точки F жестко связанной со звеном 3, можно токже воспользоваться правилом подобия. Для этого строим на отрезке (сd) плана ускорений  , повернутый относительно
, повернутый относительно  на постоянный угол
на постоянный угол  , определяемый по формуле:
, определяемый по формуле:  .
.
II класс 2 вид
В состав группы входит: 1 поступательная пара D и две последовательно расположенные вращательные пары В и С.
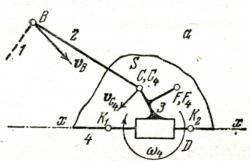
Кинемат. схема II класс 2 вид План скоростей II класс 2 вид
Звено 2 входит во вращательную пару В со звеном №1, принадлежащем основному механизму, а звено 3 входит в поступательную пару D со звеном 4 принадлежащем основному механизму. Известны вектор скорости  точки В и векторы скоростей всех точек 4го звена следовательно известна и
точки В и векторы скоростей всех точек 4го звена следовательно известна и  - угловая скорость этого звена. Звено 3-скользит по оси x-x, направляющей, принадлежащей звену 4. Представим звено 4 в виде плоскости «S», и обозначим точку плоскости S совпадающую для заданного положения с точкой С, через С4. Вектор скорости
- угловая скорость этого звена. Звено 3-скользит по оси x-x, направляющей, принадлежащей звену 4. Представим звено 4 в виде плоскости «S», и обозначим точку плоскости S совпадающую для заданного положения с точкой С, через С4. Вектор скорости  точки С4, как принадлежащей звену 4 известен. Тогда, для определения
точки С4, как принадлежащей звену 4 известен. Тогда, для определения  - вектора скорости точки «С» необходимо решить 2 векторных уравнения
- вектора скорости точки «С» необходимо решить 2 векторных уравнения
 ;
;  (5.9)
(5.9)
откуда  (5.9А)
(5.9А)
в уравнениях (5.9), (5.9А)  есть вектор скорости точки С. относительно точки С4. Векторы
есть вектор скорости точки С. относительно точки С4. Векторы  и
и  скоростей точек В и С4 известны по величине и направлению. Векторы относительных скоростей
скоростей точек В и С4 известны по величине и направлению. Векторы относительных скоростей  и
и  известны только по направлению.
известны только по направлению.
Величины скоростей  ,
, и скорость
и скорость  точки С определяется из постоянного плана скоростей.
точки С определяется из постоянного плана скоростей.
Строим план скоростей, р – полюс плана и откладываем от нее векторы  и
и  (они известны) скоростей точек В и С4 в виде отрезков (рв) и (рс4), изображающих в выбранном масштабе
(они известны) скоростей точек В и С4 в виде отрезков (рв) и (рс4), изображающих в выбранном масштабе  эти скорости. Через точку «в» проводим прямую в направлении вектора скорости ,
эти скорости. Через точку «в» проводим прямую в направлении вектора скорости ,  к направлению ВС, а через точку с4 проводим прямую в направлении относительной скорости , II оси x-x поступательной пары D. Точка пересечения этих векторов и даст конец вектора
к направлению ВС, а через точку с4 проводим прямую в направлении относительной скорости , II оси x-x поступательной пары D. Точка пересечения этих векторов и даст конец вектора  скорости точки С. Величина скорости определяется по формуле:
скорости точки С. Величина скорости определяется по формуле:  ;
; 

|
|
|
Ускорение группы II класса второго вида.
Поступаем аналогично решению задач о скоростях: Известны:  точки В и ускорение всех точек звена 4, следовательно и его углов ускорения
точки В и ускорение всех точек звена 4, следовательно и его углов ускорения  . Со звеном 4 скрепляем плоскость S, находим точку С4, совпадающую в данном положении с точкой «С». Векторы и
. Со звеном 4 скрепляем плоскость S, находим точку С4, совпадающую в данном положении с точкой «С». Векторы и  , ускорений точки В и С4 – известны.
, ускорений точки В и С4 – известны.
План ускорений II класс 2 вид
Ускорение точки С определяется из уравнений
 (5.10)
(5.10)
Относительное (релятивное) ускорение  - ускорение точки С относительно плоскости S, принадлежащей звену 4. Т.к. ось x-x направляющей вместе с плоскостью S – имеет сложно поступательное-вращательное движение, то во 2м уравнении кроме относительного ускорения
- ускорение точки С относительно плоскости S, принадлежащей звену 4. Т.к. ось x-x направляющей вместе с плоскостью S – имеет сложно поступательное-вращательное движение, то во 2м уравнении кроме относительного ускорения  имеем и кориолисово ускорение
имеем и кориолисово ускорение  . Решаем совместно 2 уравнения, получаем:
. Решаем совместно 2 уравнения, получаем:
 (5.11),
(5.11),
где и - известны.

где (вс) и (ВС) суть отрезки из плана скоростей и со схемы.
 масштабы длин, скоростей и ускорений.
масштабы длин, скоростей и ускорений.
Вектор  направлен II направлению ВС, от точки С к точке В.
направлен II направлению ВС, от точки С к точке В.
Как известно из теоремы механики кориолисово ускорения  по величине равно
по величине равно  (5.12)
(5.12)
Где отрезок С4С должен быть взят из плана скоростей. Направление вектора кориолисова ускорения может быть найдено общими приемами векторной алгебры.
 (5.13)
(5.13)
Для определения направления  вектор
вектор  поворачиваем на угол 900 в сторону вращения углов скорости
поворачиваем на угол 900 в сторону вращения углов скорости  .
.
Из равенства (5.13) следует, что вектор лежит в плоскости движения механизма и для определения его направления достаточно  - вектор скорости т. е. относительно плоскости S – повернуть на угол 900 в сторону вращения, обусловленного угловой скоростью . Т. о. вектор к оси направляющей x-x, а величина его определяется по формуле (5.12), подстановкой в эту формулу заданной угловой скорости и длины известного из плана скоростей отрезка С4С, изображающего в масштабе
- вектор скорости т. е. относительно плоскости S – повернуть на угол 900 в сторону вращения, обусловленного угловой скоростью . Т. о. вектор к оси направляющей x-x, а величина его определяется по формуле (5.12), подстановкой в эту формулу заданной угловой скорости и длины известного из плана скоростей отрезка С4С, изображающего в масштабе  скорость .
скорость .
Векторы ускорений  и
и  входящее в уравнение. (5.10)
входящее в уравнение. (5.10)
Из величины только по направлению.
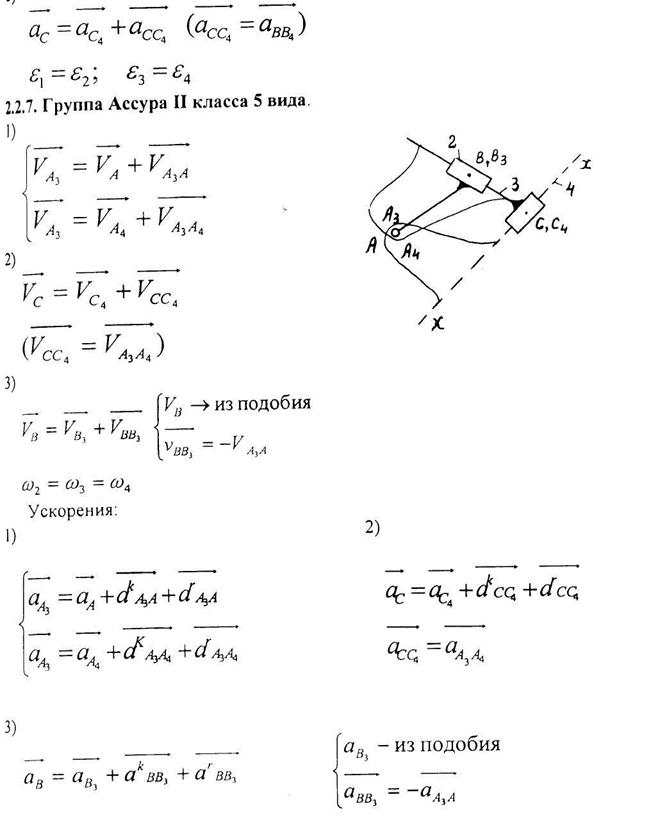
II класс 3 вид
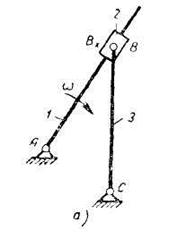
Пример. На (рис. а ) изображена схема четырехзвенного механизма с тремя вращательными и одной поступательной парой. Ведущее звено 1 связано с ползуном 2 в поступательную пару; звено 3 связано с ползуном во вращательную пару В. Угловая скорость звена 1 направлена по часовой стрелке, величина ее известна. Определить .
|
|
|
Отметим на звене 1 точку В Х, расположенную под точкой В, т. е. находящуюся на расстоянии АВ Х от точки А, равном АВ.
Для определения можем написать два векторных уравнения:
В соответствии с первым уравнением мы должны провести  - вектор
- вектор  -и к концу этого вектора пристроить вектор
-и к концу этого вектора пристроить вектор 
скорости 
Длина вектора = где
где  — длина АВ Х,
— длина АВ Х,
 — угловая скорость звена 1 и — масштаб плана скоростей. Длина вектора bХb не может быть пока определена, так как величина скорости неизвестна. Так как точка B Х относительно точки В может перемешаться только вдоль звена 1, то проведя вектор перпендикулярно звену 1, от точки b Х проводим линию действия параллельно звену 1 (рис. б).
— угловая скорость звена 1 и — масштаб плана скоростей. Длина вектора bХb не может быть пока определена, так как величина скорости неизвестна. Так как точка B Х относительно точки В может перемешаться только вдоль звена 1, то проведя вектор перпендикулярно звену 1, от точки b Х проводим линию действия параллельно звену 1 (рис. б).
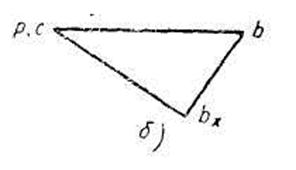
В соответствии со вторым уравнением точку с помещаем в полюсе, так как Vc = О, и от точки с проводим линию действия Vbc перпендикулярно к ВС, так как точка В относительно точки С может перемещаться только по окружности с радиусом ВС.
Точкой b пересечения линий действия определяется величина и направление  — вектор
— вектор  .
.
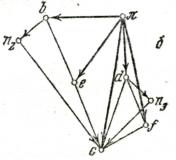
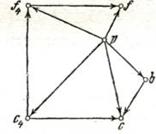
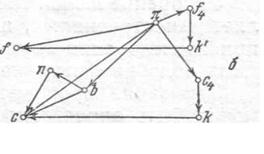
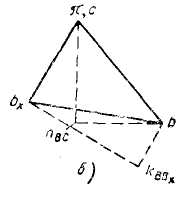
 Пример. Построить план ускорений для механизма, схема которого приведена на (рис. а).
Пример. Построить план ускорений для механизма, схема которого приведена на (рис. а).
План ускорений II класс 3 вид
При составлении векторных уравнений для определении ускорений  необходимо принять во внимание, что точка В, перемещаясь по вращающемуся звену, движется с поворотным (кориолисовым) ускорением, которое будем обозначать также буквой а с верхним индексом k.
необходимо принять во внимание, что точка В, перемещаясь по вращающемуся звену, движется с поворотным (кориолисовым) ускорением, которое будем обозначать также буквой а с верхним индексом k.
Для определения  можно написать два векторных уравнения:
можно написать два векторных уравнения:


Определяем величины и направления геометрических слагаемых в правых частях обоих уравнений:
| Ускорение | Величина | Направление |

|  где
где  - длина вектора на плане скоростей, приведенном на (рис. б), и - длина вектора на плане скоростей, приведенном на (рис. б), и  - масштаб этого плана. - масштаб этого плана.
| От точки ВХ (рис. а) к точке А, так как при вращении звена 1 с равномерной скоростью полное ускорение равно нормальному |

|  так как так как 
| - |

|  , где , где  - длина вектора на плане скоростей - длина вектора на плане скоростей
| Определяется вектором скорости , повернутым на 900 в направлении вращения звена 1, т. е. в данном случае по часовой стрелке. Скорость направлена вверх направо (см. вектор  на рис. б) параллельно звену 1, следовательно, ускорение на рис. б) параллельно звену 1, следовательно, ускорение  направленно вправо перпендикулярно звену 1. направленно вправо перпендикулярно звену 1.
|

| Неизвестна | По звену 1 |

| Равна нулю, так как точка С неподвижна | - |

|  ,
где cd – длина вектора ,
где cd – длина вектора  на плане скоростей на плане скоростей
| От точки В к точке С |

| Неизвестна | Перпендикулярна звену 3 |
Разделив величины ускорений на масштаб  плана ускорений, определим длины векторов. Приняв во внимание указанные выше направления всех векторов в соответствии с первым из приведенных выше уравнений, проводим последовательно (рис. б) вектор
плана ускорений, определим длины векторов. Приняв во внимание указанные выше направления всех векторов в соответствии с первым из приведенных выше уравнений, проводим последовательно (рис. б) вектор  ускорения
ускорения  , вектор
, вектор  ускорения
ускорения  и линию действия ускорения
и линию действия ускорения  . В соответствии со вторым уравнением от точки с, совпадающей с полюсом
. В соответствии со вторым уравнением от точки с, совпадающей с полюсом  , проводим вектор
, проводим вектор  ускорения
ускорения  и из конца этого вектора линию действия ускорения
и из конца этого вектора линию действия ускорения  . Точкой b пересечения линий действия ускорений
. Точкой b пересечения линий действия ускорений  и
и  определяется конец вектора
определяется конец вектора  ускорения
ускорения  .
.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1281; Нарушение авторских прав?; Мы поможем в написании вашей работы!