КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЦюцюраС.В
|
|
|
|
С.В. ЦЮЦЮРА
С.В. ЦЮЦЮРА
ТЕОРІЯ УПРАВЛІННЯ
Конспект лекцій
Київ 2003
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Київський національний університет
будівництва і архітектури
ТЕОРІЯ УПРАВЛІННЯ
Конспект лекцій
Київ 2003
УДК 658.512.22.011.56 (075)
ББК 32.965 я (73)
Ц 98
Рецензенти: О.І. Болдаков, канд. техн. наук, доцент
В.В.Демченко, канд. техн. наук, доцент
Відповідальний за випуск В.Б.Задоров, канд. техн. наук, професор
Затверджено на засіданні кафедри ІТ, протокол № 11 від 28.10.2002 року.
Видається в авторській редакції.
Ц98
Теорія управління: Конспект лекцій. – К.: КНУБА, 2001. - 48 с.
Містить питання пов'язані з вивченням математичних моделей ланок лінійних динамічних систем для систем автоматизованого проектування і систем автоматичного управління. Значну увагу приділено питанням забезпечення комплексного підходу до управління автоматизованими системами.
Призначено для студентів спеціальності 7.08042 “Комп’ютерні системи проектування”.
УДК 658. 512. 22. 011.56.(075)
© С.В.Цюцюра, 2003
© КНУБА, 2003
ЛІНІЙНІ ДИНАМІЧНІ СИСТЕМИ УПРАВЛІННЯ
Лекція 1. Типові з’єднання елементів та їх передаточні функції
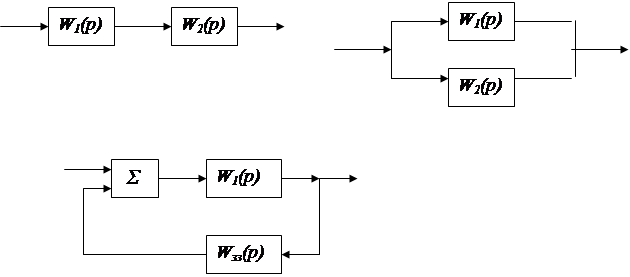
Математична модель лінійної динамічної системи може бути складена на основі математичних моделей елементів та ланок, що створюють систему. Лінійна система в загальному випадку включає в себе ланки, з’єднані послідовно, паралельно, охоплені зворотніми та перехресними зворотніми зв’язками. Передаточні функції всіх цих структур можуть виражатися через передаточні функції типових структурних ланок (рис.1.1).
|
|
|
Послідвне з’єднання ланок. В цьому з’єднанні вихідна велечина попередньої ланки є вхідною величиною наступної ланки (рис.1.1,а). Передаточна функція послідовно з’єднаних ланок дорівнює добутку передаточних функцій всіх ланок, що створюють з’єднання:
W1(p) = x2 (p)/x1(p); W2 (p) = x3(p)/x2(p);
W(p) = x3(p)/x1(p) = W2(p) x2(p)W1(p)/x2(p) = W1(p)W2(p)
В загальному випадку:
W(p) = Π Wi (p), i = 1,n, (1.1)
де n – число послідовно з’єднаних ланок.
Паралельне з’єднання ланок. В цьому з’єднанні (рис.1.1,б) на вхід усіх ланок подається одна і та ж величина, а вихідна величина дорівнює сумі вихідних величин окремих ланок. На основі рис. 1.1,б маємо:
W(p) = xвих(p)/xвх(p) = (x1вих(p) + x2вих(p))/xвх(p) =
=(W1(p)x1вх(p)+W2(p)x2вх(p))/xвх(p).
Так як, x1вх =х2вх = хвх, то W(p) = W1(p) + W2(p), або в загальному випадку при k паралельно з'єднаних ланках.
W(p) = Σ Wi(p), i = 1,k. (1.2)
 x1(p) x2(p) x3(p) x1вх(p) x1вих(p)
x1(p) x2(p) x3(p) x1вх(p) x1вих(p)
xвх(p) x вих(p)
x2вх(p) x2вих(p)
а б
хвх(р) х1 (р) xвих (р)
xзз(р)
в
Рис. 1.1. Передаточні функції лінійних динамічних систем
Таким чином, передаточна функція з’єднання з паралельних ланок дорівнює сумі їх передаточних функцій.
Ланка, охоплена зворотним зв’язком. Для цього з’єднання (рис.1.1. в)) запишемо:
x1(p) = xвх(р) ± xзз(р), (1.3)
де знак мінус – для випадку від’ємного зворотного зв’язку, плюс – для додатного.
Передаточна функція з’єднання:
W(p) = xвих(p)/xвх(p) = (W1(p)[xвх(p) ± Wзз(p)xвих(p)]) / /xвх(p), (1.4)
або після перетворення:
W(p) = W1(p)/(1±W1(p)Wзз(p)), (1.5)
де знак плюс відповідає від’ємному зворотному зв’язку, а знак мінус – додатному.
Контрольні запитання до лекції 1
1. Які типові з’єднання елементів та їх передаточні функції ви знаєте?
2. Що таке передаточні функції лінійних динамічних систем? Їх характеристика.
3. Яким чином характеризується послідвне з’єднання ланок?
4. Які особоливості паралельного з’єднання ланок?
5. З якою метою передаточна ланка охоплюється зворотним зв’язком? Види цих зв’язків.
|
|
|
Лекція 2. Математичні моделі ланок лінійних динамічних систем.
Лінійними називаються системи управління, які і в статиці і в динаміці описуються лінійними рівняннями. Одна з основних особливостей лінійних систем заключається в тому, що до них застосовується принцип суперпозиції, згідно з яким реакція системи на сукупність збурень визначається сумою реакцій на кожне збурення, яке прикладається до системи в момент часу, що розглядається.
Реальні системи управління, особливо складні – нелінійні. До лінійного опису можна умовно звести тільки невеликий клас динамічних систем, але і в цих випадках властивості реальних систем лише наближено відображуються їх лінійними моделями. Однак, недивлячись на обмеженість лінійних моделей, їх роль в теорії управління дуже велика, бо припущення про лінійність систем управління в ряді випадків не призводить до неприпустимих похибок, з однієї сторони, а з іншої – суттєво спрощує дослідження систем. Крім того, методи дослідження реальних нелінійних систем управління значною мірою базуються на методах дослідження лінійних систем.
Теорія управління лінійними системами розроблена достатньо глибоко і розпоряджається ефективними і простими методами аналізу та синтезу систем управління, в основному систем автоматичного управління та регулювання. Слід підкреслити, що лінійна теорія управління дозволяє вивчити лінійні моделі реальних процесів та об’єктів, а не самі процеси та об’єкти.
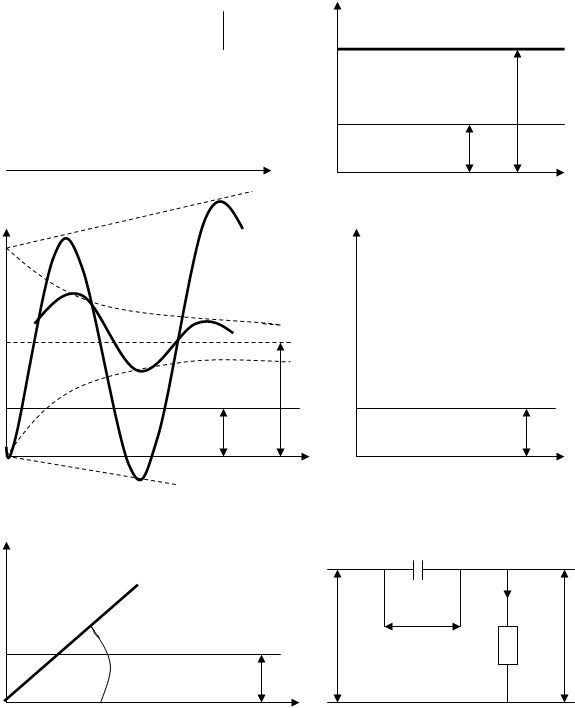
Динамічні режими лінійних систем досліджуються за допомогою їх математичних моделей. При цьому будь-яку динамічну лінійну систему можна представити у вигляді сукупності таких типових структурних ланок: аперіодичних, коливальних, інтегруючих, диференціюючих та підсилюючих. Кожна з названих ланок достатньо повно характеризується формою диференціального рівняння, видом передаточної та видом перехідної функції.
Диференціальне рівняння ланки визначає зв’язок між його вихідними та вхідними величинами в динамічних режимах.
Передаточна функція ланки W(p) представляє собою відношення перетвореною за Лапласом вихідної величини ланки до перетвореної за Лапласом вхідної величини при нульових початкових умовах:
|
|
|
W(p) = хвих(р) / хвх(р). (2.1)
Перехідна функція h(t) показує характер перехідного процесу в ланці, на вході якої прикладений одиничний вхідний вплив:
h(t) = хвих(t), при хвх(t) = [1]. (2.2)
Вказані характеристики ланки є важливими елементи апарату дослідження динамічних лінійних систем. Розглянемо ці характеристики для кожної з типових структурних ланок.
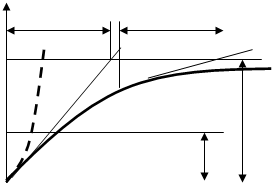
Аперіодична ланка
Аперіодичною називається ланка, в якій зв’язок між вихідною та вхідною величинами виражається рівнянням:
Tdxвих / dt + хвих = kхвх, (2.3)
де: k – коефіцієнт підсилення ланки; Т – постійна часу ланки, с.
Величини k і Т виражаються через фізичні параметри конкретної структурної ланки.
Застосовуючи до рівняння (3) перетворення Лапласа при нульових початкових умовах, отримаємо передаточну функцію аперіодичну функцію аперіодичної ланки:
W(p) = xвих(p) / xвх(p) = k / (Tp+1). (2.4)
 хвих Т Т хвих
хвих Т Т хвих
хвх хвх
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 375; Нарушение авторских прав?; Мы поможем в написании вашей работы!