КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Коливальна ланка
|
|
|
|
T
Arctg(k)
T 0 t
1 1
А г
T 0 t
1 1
2 1
kxвх хвих=kxвх
хвих хвих
хвх 2 ∞
kхвх
б д
С
xвих хвих=f(t)
хвх
хвх=f(t)i uc
1 uвх R uвих
в e
Рис.2.1. Перехідні процеси в ланках: а) аперіодичній; б) коливальній; в) інтегруючій; г) підсилюючій; д) ідеальній диференціюючій; е) схема диференціюючої ланки.
Розв’язуючи рівняння (3) відносносно хвих(t), отримаємо:
xвих(t) = kxвх (1 – e-t/T), (2.5)
або, при хвх = 1 маємо перехідну функцію аперіодичної ланки:
h(t) = k (1 – e-t/T). (2.6)
Графік перехідного процесу в аперіодичній ланці зображений на рис.1, а кривою 1. Як видно з рівняння (2.5) та рис.2.1, а), перехідний процес в аперіодичній ланці повністю визначається значеннями коефіцієнта підсилення ланки k та її постійної часу Т.
Якщо диференційне рівняння аперіодичної ланки має вигляд:
Тdxвих/dt – xвих = kxвх, (2.7)
то перехідний процес в ній описується рівнянням (2.8):
xвих(t) = ket/T, (2.8)
і задається кривою 2 на рис.2.1, а. Ланка, яка описується рівнянням (2.7), називається нестійкою аперіодичною ланкою.
Аперіодичні ланки в лінійних динамічних системах зустрічаються дуже часто. Наведемо деякі приклади.
Приклад 1. Нехай на обмотки генератораподаний скачок напруги uв. Диференційне рівняння ланки, що розглядається, має вигляд:
uв = iвRв + Ldiв/dt або uв/Rв = iв + Tdiв/dt,
де: T=L/Rв – постійна часу ланцюга ОВГ; L – індуктивність ланцюга; Rв – опір ланцюга.
Враховуючи, що в ланці яка розглядається iв =x вих, uв=xвх, отримуємо:
Tdxвих/dt + xвих = kxвх,
де k = xвих / xвих = 1 / Rв - коефіцієнт підсилення.
Приклад 2. Якщо розглянути зв’язок між змінними ω та і, то, використовуються електромеханічні властивості системи що розглядається при умові пропорційності між ω та Мс – моментом опору на валу електродвигуна, можна отримати:
|
|
|
Тdω/dt + ω = ki,
де: Т = І/с1 – постійна часу; І – момент інерції, приведений до валу двигуна; с1 - коефіцієнт пропорційності між Мс і ω; k=kм/с1 – коефіцієнт підсилення; kм - коефіцієнт пропорційності між момементом М, який розвивається двигуном, та струмом і.
Коливальною називається ланка, в якій зв’язок між вихідною та вхідною величинами виражається рівнянням:
Т² d²xвих/dt² +2ξTdxвих/dt + xвих = kxвх. (2.9)
При умові ξ < 1. У рівнянні (2.9) Т – постіна часу; k – коефіцієнт підсилення; ξ – коефіцієнт затухання.
Розв’язок диференційного рівняння (2.8), а отже, характер зміни хвих(t) залежить від значення коренів відповідного характеристичного рівняннь:
Т²α² + 2ξТα + 1 = 0; (2.10)
 α1,2 = - 1/Т (ξ + √ξ² - 1). (2.11)
α1,2 = - 1/Т (ξ + √ξ² - 1). (2.11)
При ξ < 1 корені α1 та α2 – комплексні. В цьому випадку перехідний процес в ланці носить коливальний характер, а перехідна функція коливальної ланки має вигляд:

h(t)=k[1-(e-ξt/T/√1-ξ²) sin((√1-ξ²/T)*t+arctg(√1-ξ²/ξ))]. (2.12)
Коливання (2.12) носять затухаючий характер – крива 1 на рис.2.1 б. Дійсно, з виразу (2.12) при t→ ∞ маємо хвих(t) → k.
Застосовуючи до рівняння (2.9) перетворення Лапласа при нульових початкових умовах, отримаємо передаточну функцію стійкої коливальної ланки:
W(p) = xвих(p)/xвх(p) = k/(T²p² + 2ξTp + 1). (2.13)
Якщо диференційне рівняння ланки має вигляд:
Т²d²xвих/dt² – 2ξdxвих/dt + xвих = kxвх , (2.14)
то перехідна функція:

h(t)= k(eξt/T/√1-ξ²)sin((√1-ξ²/T)t+arctg(√1-ξ²/ξ)). (2.15)
З виразу (2.15) при t→ ∞ слідує h(t)→ ∞, тобто коливання в такій ланці носять розбіжний характер (крива 2 на рис.2.1, б). Ланка, в якій зв’язок між вхідною та вихідною величинами описується диференційним рівнянням (2.13) при ξ < 1, називається нестійкою коливальною ланкою.
У випадку, якщо в рівнянні (2.8) ξ >1, то корені характерестичного рівняння (2.10) будуть дійсними:
|
|
|
 α1 = - (ξ + √ξ² - 1)/T; α2 = -(ξ - √ξ²-1)/Т.
α1 = - (ξ + √ξ² - 1)/T; α2 = -(ξ - √ξ²-1)/Т.
В цьому випадку перехідний процес у ланці визначатиметься за формулою:
h(t) = k(1- T1/(T1-T2)e-t/T1+T2 / (T1 -T2)e –t/T2, (2.16)
де: Т1 = - 1/α1; Т2 = - 1/α2.
Таким чином, при ξ>1 рівняння (2.9) описує дві аперіодичні лани, з’єднані послідовно що мають постійні часу Т1 і Т2 та коефіцієнти підсилення, добуток яких дорівнює k.
Прикладом коливальної ланки може бути двигн постійного струму незалежного збурення (рис.2.1, б), у якого хвх= u – напруга, що підводиться до якоря електродвигуна; хвих=n – швидкість обертання вихідного валу, а момент опору на валу Мс=0, тобто двигун працює вхолосту, при цьому враховується індуктивність ланцюга якоря. При вказаних умовах рівняння двигуна:
ТмТл d²n/dt² + Tм dn/dt + n = ku, (2.17)
де: Тм – електромеханічна постійна часу, яка характеризує механічну інерцію валу; Тя – електромагнітна постійна часу ланцюга якоря двигуна, яка характеризує електромагнітну інерцію ланцюга якоря; k – коефіціент підсилення.
Величини Тм, Тя, і k визначаються через параметри двигуна, в тому числі Тя = Lя/Rя, де Lя, Rя - індуктивність та опір ланцюга якоря.
Позначаючи в (17) ТмТя = Т²; Тм = 2ξТ, отримаємо типове рівняння коливальної ланки, в якій хвх= u; хвих= n:
Т²d²n/dt² + 2ξTdn/dt + n = ku.
Рівнянням типу (2.9) описується рух маси, що підвішана на пружині, електромагнітні процеси в електричному ланцюзі, що містить індуктивність L, активний опір R, ємність С та багато інших ланок динамічних систем. Всі ланки такого типу мають передаточну функцію виду (2.12). При цьому величини k і T виражаються через конструктивні параметри відповідної ланки.
Інтегруюча ланка
Інтегруючою називається ланка, в якій вихідна величина пропорційна інтегралу від вхідної величини:
t
хвих=k∫ xвх dt, або dxвих /dt = kxвх. (2.18)
0
Застосовуючи до (2.18) перетворення Лапласа при нульових початкових умовах, отримаємо передаточну функцію інтегруючої ланки:
W(p) = xвих(p)/x вх(p) = k/p. (2.19)
На основі (2.18) маємо перехідну функцію інтегруючої ланки (рис.2.1, в):
h(t) = -kt. (2.20)
З виразу (2.19) видно, що в інтегруючій ланці швидкість зміни вихідної величини пропорційна вхідній величині, тобто інтегруюча ланка є астатичною.
|
|
|
Прикладом інтегруючої ланки може бути двигун в якому в якості вхідної величини розглядається швидкість обертання вала n, а в якості вихідної – кут його повороту φ. В цьому випадку маємо:
t t
n =cdφ/dt, або φ = 1/c ∫ ndt = k ∫ ndt,
0 0
де k і с – коефіцієнти пропорційності.
Підсилююча ланка
Підсилюючою називається ланка, в якій вихідна величина пропорційна вхідній:
хвих = kxвх; W(p) = xвих(p)/xвх(p) = k. (2.21)
Підсилююча ланка безінерційна – перехідний процес відсутній: вихідна величина змінюється разом зі змінами вхідної величини, без зсуву у часі (рис.2.1, г). В дійсності будь-яка реальна ланка володіє інерційністю. Тому в динамічній системі підсилюючою (безінерційною) приймається така ланка, в якій перехідні процеси протікають невимірно швидше, ніж в інших ланках системи. Прикладом підсилюючих ланок може бути електронний підсилювач в системах регулювання механічних, теплових та інших інерційних процесів.
Диференціююча ланка
Ідеальною диференціюючою називається ланка, в якій вихідна величина пропорційна похідній від вхідної велечини:
хвих = Т dxвх/dt, (2.22)
де Т – постійна часу ланки, яка визначається через її параметри.
Передаточна функція ідеальної диференціюючої ланки:
W(p) = xвих(p)/xвх(p) = Тp. (2.23)
З передаточної функції (2.23) видно, що при стрибкоподібній зміні вхідної велечини значення вихідної величини прямує до нескінченості, тобто при хвх = [1]; хвих = ∞ (рис.2.1, д). Звичайно що в реальних ланках такий перехідний процес не можливий та його описання в формі (2.22) ідеалізоване.
Як приклад диференціюючої ланки широко застосовується RC-контур (рис. 2.1, е), для якого на основі законів Ома та Кірхгофа можна записати:
uвх = uс + iR = uс + uвих = 1/C ∫ idt + uвих.
Враховуючи, що і = uвих / R, маємо:
uвх = 1/Т ∫ uвих dt + uвих,
де Т = RC – постійна часу електричного контура, С.
З останнього виразу отримаємо:
Тduвих /dt + uвих = Т duвх /dt. (2.24)
Беручи до уваги, що u вих = хвих; uвх = xвх, на основі (2.24) запишемо:
Тdxвих/dt + uвих = Тduвх/dt . (2.25)
Підбираючи параметри ланки так, щоб Т dxвих/dt <<хвих, з (2.25) отримаємо рівняння ідеальної диференціюючої ланки – рівняння (2.22).
|
|
|
На вході реальних диференціюючих ланок окрім складової, пропорційної похідній від вхідної велечини, генеруються також і інші складові. В лінійних динамічних системах поряд з ідеальною диференційною ланкою, що описується рівняням (2.22) та передаточною функцією (2.23), в якості типових структурних ланок прийняті також:
- реальна диференціююча ланка першого порядку, яка описується рівнянням:
k(Тdxвх/dt + xвх) = xвих . (2.26)
- диференціююча ланка другого порядку, яка описується рівнянням:
k (Т² d²xвх/dt² + 2ξτ dxвх/dt +xвх) = xвих. (2.27)
Застосовуючи до (2.26) та (2.27) перетворення Лапласа при нульових початкових умовах, отримаєм передаточну функцію диференціюючої ланки першого порядку:
W(p) = xвих(p)/xвх(p) = k(Тp + 1), (2.28)
та передаточну функцію диференціюючої ланки другого порядку:
W(p) = xвих(p)/xвх(p) = k(Т²p² + 2ξТp + 1) (2.29)
Постійна часу Т та коефіцієнт підсилення ланки k визначається на оснсві параметрів конкретних ланок.
Диференціюючі ланки широко використовуюються як корегуючий пристрій, що вводяться в систему для покращення її динамічних властивостей. За допомогою таких ланок у закони управління вводяться складові, пропорційні похідним по часу за відхиленням чи збуренням, що збільшує швидкодію системи.
Описаними типовими структурними ланками охоплюються всі ланки, можливі в динамічній системі управління. Не важко помітити універсальність приведеного математичного описання. Дійсно, описування ланок динамічних систем з використаням апарату передаточних функцій, що базується на початкових диференційних рівняннях, не залежить від їх фізичної природи. Будь-яка система управління, не залежно від призначення, структури, фізичної природи її елементів може бути представлена математичною моделлю у вигляді сукупності розглянутих вище типових структурних ланок (табл. 1).
Таблиця 1
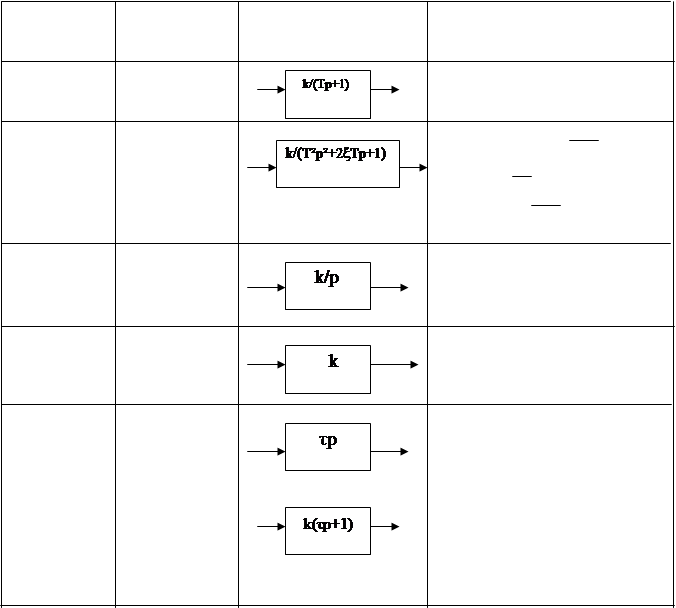
Ланка Передаточна Типова ланка Перехідний процес
функція
хвх хвих
Аперіодична W(p)=k/(Tp+1) хвих=kхвх(1-е-t/T)
Коливальна W(p)= хвх хвих хвих=kxвх[1-(e-ξ t/T)/√1-ξ² *
=k/(T²p²+2ξTp+1)
*sin((√1-ξ² /T)t+
+arctg(√1-ξ²) / ξ) ]
хвх хвих
Інтегруюча W(p)= k/p хвих = kxвх t
хвх хвих
Підсилююча W(p) = k хвих = kxвх
хвх хвих
Диференцію - W(p) = τ p хвих = τ dхвх/dt
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1511; Нарушение авторских прав?; Мы поможем в написании вашей работы!