КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Абсолютно пружний удар
|
|
|
|
Де

 ; R- радіус кривизни траєкторії
; R- радіус кривизни траєкторії
Рис. 1.6
1.4 Траєкторія
У загальному випадку траєкторію можна представити як криву, що складається з дуг кіл різного радіуса зв’язаних один з одним.
Радіус кривизни траєкторії – це радіус того кола частиною якої є дана ділянка траєкторії в даний момент часу.
Розглянемо рух тіла кинутого під кутом до горизонту:

| Рис. 1.7 | Рис.1.8 |
Математично траєкторія задається як рівняння що зв’язує між собою координати тіла в будь-який момент часу, тобто – це рівняння кривої вздовж якій рухається тіло.
Алгоритм для знаходження рівняння траєкторії:
1.Задати закон по якому міняється радіус-вектор з часом.
2.Задати систему кінематичних рівнянь, яка складається з законів зміни координат з часом і швидкості з часом.
3.Знайти рівняння траєкторії
y=y(x,z) – при просторовому русі
y=y(x) – при плоскому русі
Вважатимемо, що в даному прикладі рух тіла є рівномірним у вздовж вісі ОХ, вздовж ОУ – рівноперемінним.
Щоб отримати рівняння траєкторії виключимо час:
 ,
,  =
=
 ,
, 
Рівняння траєкторії зручно використовувати для розрахунку особливих точок при русі тіла по цій траєкторії.
Знайдемо дальність польоту тіла використовуючи отримане рівняння. Під дальністю польоту розуміємо максимальну відстань яку пролітає тіло у напрямі вісі Х. В цей момент координати тіла по осі Y, як видно з креслення будуть рівні 0.

1.5 Кінематика руху по колу
Рух по колу характеризується тим, що радіус-вектор, що задає положення тіла переміщується з часом вздовж кривої з постійним радіусом кривизни, тобто по колу. Координатою тіла в цьому випадку є кут поверту радіус- вектора(рис. 1.9)
 | |||
 | |||
|
|
|

 | |||
|

|
Дуга кола рівна шляху S. Довжина радіус-вектора постійна і дорівнює радіусу кола.

 - радіус кола
- радіус кола
Одиниця виміру кута φ в СІ – радіани. Для того щоб величину кута φ виразити в радіанах необхідно розділити довжину дуги, на яку опирається кут, на радіус кола.
 =рад. =
=рад. = 
Зв'язок між радіанною и градусною мірою виміру кутів визначається співвідношенням: 2π рад = 360
Кутова швидкість  - це величина, що дозволяє описати залежність кута оберту від часу та чисельно дорівнює куту поворота тіла в одиницю часу.
- це величина, що дозволяє описати залежність кута оберту від часу та чисельно дорівнює куту поворота тіла в одиницю часу.
Кутова швидкість в даний момент часу в даній точці траєкторії називається миттєвої.
За визначенням, миттєвої кутовою швидкістю називається перша похідна від кута повороту по часу:


Для того щоб знайти кут повороту тіла на інтервалі від  необхідно проінтегрувати даний вираз в даних межах
необхідно проінтегрувати даний вираз в даних межах
Δφ =  (t)dt
(t)dt
Цей вираз дозволяє отримати закон за яким змінюється кут поворота тіла з часом.
Середньою кутовою швидкістю по визначенню, називається величина рівна відношенню кута поворота тіла до проміжку часу за який цей поворот здійснений. Величина середньої кутової швидкості не залежить від напрямку руху и від закону зміни з часом.
=
 =
=
Де - векторна величина. Напрямок ω визначається правилом правого гвинта або «буравчика» (рис.1.11)
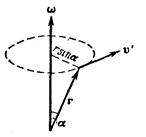
Рис 1.11
Відповідно до правила «буравчика» ω співпадає з напрямком поступальної ходи рукоятки буравчика, якщо обертальний рух цієї рукоятки співпадає з напрямком обертання тіла. Вектор ω направлений вздовж вісі обертання.
Кутове прискорення  - це величина, що характеризує зміну швидкості. Миттєвим прискоренням називається прискорення в даний момент часу в даній точці траєкторії, модуль цієї величини дорівнює першій похідній від кутової швидкості за часом:
- це величина, що характеризує зміну швидкості. Миттєвим прискоренням називається прискорення в даний момент часу в даній точці траєкторії, модуль цієї величини дорівнює першій похідній від кутової швидкості за часом:
|
|
|


Для того щоб знайти зміну кутової швидкості тіла на інтервалі від необхідно проінтегрувати даний вираз в даних межах
від  :
:  , dt=
, dt=
Середнє кутове прискорення по визначенню, дорівнює відношенню зміни кутової швидкості до інтервалу часу за яке ця зміна відбулася:


Кутове прискорення є векторною величиною. Напрямок цього вектора співпадає з напрямком вектора ω в тому випадку коли ω зростає з часом, і вектор кутового прискорення протилежний кутовій швидкості в тому випадку коли швидкість з часом зменшується.


Прискорений рух Сповільнений рух

 =
=
Рис. 1.12 Рис.1.13
Період обертання, по визначенню – це час одного оберту
T= , (1.8)
, (1.8)
де N – все число обертів, t – час обертання

Частота обертання – це число обертів за одиницю часу.
 ;;
;;  =[1/c]=
=[1/c]=
Лінійна швидкість руху тіла – це швидкість з якою тіло рухається по траєкторії.
Миттєва швидкість:
V(t)= (1. 9)
(1. 9)
Де dl – елемент дуги кола
dt – час за який пройдена відстань
Між кутовою і лінійною швидкістю і рухом по колу існує зв'язок. Знайдемо цей зв'язок:

Зв'язок між кутовою швидкістю і частотою або періодом обертання: по визначенню, середня кутова швидкість 
Де 
 ,
, 
1.6 Нормальне і тангенціальне прискорення при русі по колу.
Повне прискорення.
Нормальне прискорення зв’язане зі зміною швидкості по напрямку і визначається виразом: 
Тангенціальне зв’язане зі зміною швидкості по величині і визначається виразом: 
Де V= ωr,  , a =
, a = 
Зв'язок між характеристиками обертального і поступального руху в кінематиці.
Таблиця 1.1
| № | Характеристика | Поступальне | Обертальне |
| Координати | x(y,z) | 
| |
| Швидкість | V=
| 
| |
| Прискорення | a = 
| 
| |
| Шлях | s = V(t)dt | 
| |
| Закони рівномірного руху | s = Vt; a = 0; V = const | 

| |
| Закони рівно перемінного руху | S = V=
V=
| 

|
- Динаміка
2.1 Предмет динаміки
Предмет динаміки – це механічний рух з урахуванням взаємодій тіл одне з одним а також полів. Закони динаміки встановлюють зв'язок між положенням тіла в кожний момент часу і взаємодії яке випробовує тіло. Основні закони динаміки: закон Ньютона, закон збереження енергії і імпульсу.
2.2 Взаємодія тіл в природі, поняття про силу.
У природі існує нескінченна безліч взаємодій, проте все різноманіття може бути зведене до чотирьох основних типів взаємодій. Ці взаємодії називаються фундаментальними. До фундаментальних відносяться:
|
|
|
1. Гравітаційна взаємодія
2. Електромагнітна взаємодія
3. Сильна взаємодія
4. Слаба взаємодія
Кількісною мірою взаємодії є сила – це величина векторна характеризується модулем, напрямком и точкою додатку. Всі ці характеристики залежать від конкретного виду взаємодій. Якщо тіло використовує декілька взаємодій, то говорять, що на нього діє декілька сил і результат дій цих сил визначається рівнодіючою силою. Відповідно до принципу суперпозиції взаємодіючих величина взаємодіючих рівна векторній сумі всіх сил прикладених до тіл.
Сили ті, що вивчаються механікою відносяться до гравітаційних і електромагнітних. Сильна і слаба взаємодія проявляється у мікросвіті, тобто при взаємодії елементарних частинок.
Проявом гравітаційної дії, є сили всесвітнього тяжіння. Величина і напрямок сили всесвітнього тяжіння в співвідношенні з яким всі тіла притягуються один до одного силами прямо пропорційно мас цих тіл і обернено пропорційно квадрату відстані між ними.
Fгр = G - тільки для мат. точок і однорідних тіл сферичної форми.
- тільки для мат. точок і однорідних тіл сферичної форми.
Якщо тіла не є матеріальними точками то для розрахунку сили всесвітнього тяжіння необхідно:
1. Представити кожне тіло як систему матеріальних точок.
2. Розрахувати попарно силу взаємодії між всіма точками.
3. Знайти результуючу усіх отриманих сил.
Окремий випадок сили всесвітнього тяжіння є сила тяжіння.
Результатом дії є зміна швидкості руху тіла, а також положення цього тіла у просторі, тобто повідомлення тілу прискорення. У випадку дії сили тяжіння називається прискоренням вільного падіння тіла.
Відповідно до другого закону Ньютона:
F=mg
Fгр= mg=; g =
mg=; g =
Гравітаційна взаємодія здійснюється за допомогою гравітаційного поля. Як всяке силове поле воно має дві характеристики: напруженість і потенціал. Напруженість – силова характеристика; потенціа л – енергетична.
По визначенню напруженість гравітаційного поля називається величина чисельно рівна силі дії на одиницю пробної маси поміщеною в дану точку поля.
|
|
|
 G – вектор напрямку гравітаційного поля
G – вектор напрямку гравітаційного поля
Таким чином можна сказати, що прискорення вільного падіння тіла, що знаходиться в будь-якому гравітаційному полі є модулем вектора напруженості цього поля.
Прояв електромагнітної взаємодії у механіці є сили тертя і пружності, окремим випадком сили пружності – сила нормальної реакції опори.
2.3 Пружні та пластичні деформації. Модуль Юнга. Закон Гука.
Деформацією називається будь-яка зміна форми і розмірів тіла під дією зовнішніх прикладених сил. Існують деформації двох видів: пружні та пластичні.
Пружними називаються деформації при яких після припинення дії зовнішніх сил форма і розміри тіла повністю відновлюються.
Пластичними називаються деформації при яких після припинення дії зовнішніх сил форма і розміри не відновлюються. При цьому в тілі виникають залишкові деформації.
Сила виникаюча в тілі при його деформації називається силою пружності. Між силою пружності і абсолютною деформації тіла існує прямо пропорційна залежність, звана законом Гука. Цей закон має
 пр = - k
пр = - k (2.1)
(2.1)
ДеFпр – сила пружності,
Δх – вектор абсолютної деформації
k – коефіцієнт жорсткості(пружності )
По своєму фізичному сенсу k це величина, що показує яку силу треба прикласти до тіла щоб абсолютна деформація цього тіла дорівнювала 1м.
k=
 =
=
Величина коефіцієнта жорсткості залежить від форми и розміру тіла, а також від роду матеріалу з якого виготовлено це тіло. Знак «-» вказує на те, що вектор абсолютної деформації направлений у бік протилежну деформації тіла.
Механізм виникнення сили пружності пояснюється електромагнітною взаємодією між атомами (молекулами) тіла, що деформується. Відомо, що будова твердих тіл у більшості випадків є кристалічною, тобто атоми (молекули) розташовані строго впорядкованно і утворюють кристалічну решітку. Ті точки простору в яких знаходяться атоми або молекули називаються вузлами кристалічної решітки.
Якщо на тіло не діють зовнішні сили то атоми або молекули знаходяться на фіксованій відстані R0 один від одного. Оскільки між атомами або молекулами діють сили тяжіння або відштовхування, то рівнодіюча цих сил рівна 0, якщо не деформується.
Якщо зближувати атоми на відстані <R0, що відбувається при стисненні тіл, то сила відштовхування починає переважати рівнодіючу цих сил. Відштовхування буде утворювати Fпр тілі, під дією якої тіло прагне прийняти колишні розміри.
Якщо під дією зовнішніх сил F відбувається розтягування тіла і відстань між його атомами становить більше чим R0 переважає явище сили тяжіння між атомами. В результаті виникає сила пружності, що повертає тіло в початковий стан.
Оскільки сили взаємодії між атомами є електромагнітними то і сили відносяться до електромагнітної взаємодії. Для характеристики процесів виникнення при деформації використовують дві величини: механічна напруга і відносна деформація.
Механічною напругою називається величина рівна силі дії на одиницю площі поперечного перетину тіла, що деформується:
 (2.2)
(2.2)
 =
= F=
F= -сила пружності
-сила пружності
Відносною деформацією називається величина рівна відношенню абсолютної деформації до первинної довжині тіла.
 =
=
 - відносна деформація
- відносна деформація
 =
= (або у %) l0- первинна довжина
(або у %) l0- первинна довжина
Знайдемо зв'язок між механічною напругою і відносній деформацією в області пружних деформацій по закону Гука:

Де Δx =  ; =
; =  ;
;  =
= 
 Модуль Юнга (2.3)
Модуль Юнга (2.3)
=E- закон Гука у диференційній формі
Таким чином в області пружних деформацій прямо пропорційна відносно деформації .
Фізичний сенс модуля Юнга можна встановити виразив цю величину з закона Гука:
 (2.4)
(2.4)
при  (100%)
(100%)  ==
== =
=
З формули видно, що модуль Юнга це величина рівна тій механічній напрузі яка виникає в тілі при якому відносна деформація тіла рівна 1 або 100%.

 ;
; 
Отже модуль Юнга – це механічна напруга, що виникає у тілі при збільшенні його довжини у 2 рази. Модуль Юнга вже не залежить від форми і розмірів, а визначається тільки пружними властивостями матеріалів, тобто будовою його кристалічної решітки и особливістю взаємодії його атомів та молекул. Тому у відмінності від коефіцієнта жорсткості модуль Юнга є величиною табличною.
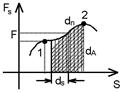
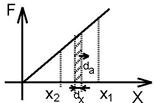
Діаграма механічної напруги.
Рис. 2.1
Ділянка ОА відповідає малим деформаціям  , при цьому між
, при цьому між  та eіснує пряма пропорційність, тобто виконується закон Гука, тому область ОА називають областю пружних деформацій тіла. Після досягнення точки А
та eіснує пряма пропорційність, тобто виконується закон Гука, тому область ОА називають областю пружних деформацій тіла. Після досягнення точки А  не існує пряма пропорційність, проте після зняття механічної напруги в цій області тіло повністю відновлює свою форми і розміри і область АВ є також областю пружних деформацій.
не існує пряма пропорційність, проте після зняття механічної напруги в цій області тіло повністю відновлює свою форми і розміри і область АВ є також областю пружних деформацій.
Область ВС; в цій області закон Гука не виконується і деформації тіла стають пластичними, це означає, що після зняття навантаження сили, що зовні діє, в тілі виникають залишкові деформації. Тіло повертається в початковий стан по кривій CF.
Область CD – це область текучості в цій області таке, що тіло мимовільно подовжується, при цьому площа перетину цього тіла зменшується. Механічна напруга при цьому залишається постійною. При досягненні точки D механічна напруга стрибком зростає і в точці Е відбувається розрив тіла.
 – межа пропорційності;
– межа пропорційності;  – межа пружності;
– межа пружності;
 - межа текучості;
- межа текучості;  - межа міцності
- межа міцності
Для того щоб знайти модуль Юнга використовуючи діаграму напруги, необхідно в області пружної деформації вибрати дві довільні точки 1 і 2.



З цієї системи виразимо модуль Юнга віднімаючи праві і ліві частини цих рівнянь Е=
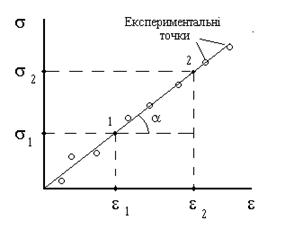
| Рис. 2.2 |
З графіка видно що модуль Юнга = tg кута нахилу цього графіка та залишається постійним тільки в області пружних деформацій.
3. Імпульс. Закони збереження імпульсу
Імпульс – це кількісна міра руху.
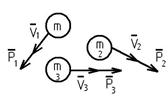 Імпульсом тіла називається векторна величина, модуль якої рівний твору маси тіла на його швидкість, а напрямок співпадає з напрямком швидкості тіла.Система складається з декількох взаємодіючих тіл володіє імпульсом. Імпульс системи тіл рівний сумі імпульсів усіх тіл, складаючи дану систему(рис. 3.1).
Імпульсом тіла називається векторна величина, модуль якої рівний твору маси тіла на його швидкість, а напрямок співпадає з напрямком швидкості тіла.Система складається з декількох взаємодіючих тіл володіє імпульсом. Імпульс системи тіл рівний сумі імпульсів усіх тіл, складаючи дану систему(рис. 3.1).
Рис. 3.1
Рис. 3.2
Для того, щоб знайти повний імпульс системи, існує алгоритм:
1.Вибрати систему координат, в початок якої перенести вектора імпульсів усіх тіл, складаючи цю систему
2.Знайти проекції цих векторів по осі координат
3.Знайти результуючий вектор проекції імпульсу системи на кожну з осей
4.Знайти модуль повного імпульсу системи, використовуючи теорему Піфагора

 ;
; 



 ;
;  ;
; 
Тому максимально загальний вид визначення імпульсу має
Зміна швидкості пов’язана с дією сили на рухоме тіло. Знайдемо зв'язок між вектором сили и зміною імпульсу під дією цієї сили:
= m - основний закон динаміки (3. 1)
- основний закон динаміки (3. 1)
За визначенням a = ® F = m
® F = m 
Якщо маса тіла не міняється F =  =
= 

Похідна є швидкістю зміни імпульсу, отже, сила, діюча на тіло або систему тіл, рівна швидкості зміни імпульсу.
Імпульс сили – добуток сили на час руху.
dt – імпульс сили, dt = 
Усі системи тіл можна звести до двох видів:
- замкнуті – якщо на неї не діють зовнішні сили або їх дія компенсується.
- незамкнуті – якщо вказані умови не виконуються

Рис. 3.3
Розглянемо загальний випадок незамкнутої системи тіл и знайдемо зв'язок між зміною повного імпульсу цієї системи і рівнодіючою зовнішніх сил, прикладених до тіл цієї системи Під дією прикладених сил імпульс кожного тіла змінюється і цю зміну можна визначити за формулою:

Тоді зміна 1-го тіла: 
2-го тіла: 
3-го тіла: 
Тоді зміна імпульсу всієї системи дорівнює сумі зміни імпульсу всіх тіл системи:


Так як сили полярно рівні і протилежні за знаком, то їх сума рівна нулю. Тобто зміна повного імпульсу системи проходить лише піл дією зовнішніх сил. Внутрішні сили приводять до змін імпульсів окремих сил системи, але таким чином, що це ніяк не впливає на повний імпульс всієї системи, відповідно, в загальному випадку незамкнутої системи тіл імпульс цієї системи змінюється протягом часу і швидкість зміни імпульсу дорівнює рівнодіючій зовнішніх сил:

Якщо система тіл є замкнутою, то за означенням, рівнодіюча зовнішніх сил рівна нулю і відповідно швидкість зміни імпульсу системи рівна нулю:
Це означає, що повний імпульс замкнутої системи тіл є величиною постійною. Цей окремий випадок отримав назву закону збереження імпульсу. Цей закон має декілька еквівалентних формулювань:
Це означає, що повний імпульс замкнутої системи тіл є величиною постійною. Цей окремий випадок отримав назву закону збереження імпульсу.
Цей закон має декілька еквівалентних формулювань:
· Імпульс замкнутої системи тіл до взаємодії між тілами цієї системи дорівнює імпульсу після взаємодії

· Внутрішня взаємодія тіл замкнутої системи не може змінити повного імпульсу цієї системи.
· Повний імпульс замкнутої системи тіл залишається величиною постійною протягом всього часу взаємодії між тілами цієї системи.
Закон збереження імпульсу може виконуватись в нестрогій формі, тобто зміною імпульсу системи в деяких окремих випадках можна нехтувати:
· Ситуація, коли на систему діють зовнішні сили, але часу дії сил дуже мало:
 = 0 dt→0 ®
= 0 dt→0 ®  = dt→0 ® →0®
= dt→0 ® →0®

Якщо рівнодіюча зовнішніх сил мала в порівнянні з внутрішніми силами взаємодії тіл системи:
зовн.→0, зовн dt→0, = const
= const
4. Енергія. Зв’язок енергії і роботи
4.1 Поняття енергії
Енергія за визначенням є найбільш загальною кількісною мірою руху і взаємодії тіл.
Механічна енергія тіла пов’язана з механічним рухом, тобто зі зміною швидкості тіла і його положення в просторі, тому механічну енергію розділяють два види:
· Кінетичну (енергію руху)
· Потенційну (енергію взаємодії)
Максимальна енергія, якою володіє дане тіло або система тіл дорівнює максимальній роботі, яку може здійснити це тіло при зміні його швидкості або положення в просторі. При переході із одного положення в інше, відбувається зміна швидкості і положення тіла і здійснювана при цьому робота дорівнює зміні енергії системи на даному переході, тому робота є мірою зміни енергії:

Оскільки зміна стану тіла відбувається в результаті дії на нього інших тіл або фізичних полів, то і енергія і робота, здійснювана при переході із одного стану в інший, пов’язана з силою дії на тіло. В загальному випадку, якщо під дією сили F тіло переміщається на відстань dS, то здійснювана цією силою робота dA дорівнює скалярному добутку векторів сили і переміщення:
Тобто робота є величиною скалярною і залежить від модуля дії сили, переміщення і напрямку в якому проходить переміщення:
dA = F dS 
 |
(4.1)
Рис.4.1
Робота, яка здійснюється при малому переміщенні, називається елементарною.
Для того щоб знайти роботу необхідно додати всі елементарні роботи, тобто знайти:
 (4.2)
(4.2)
Отримаємо вираз для кінетичної енергії тіла, яке рухається під дією сили F:
Рис. 4.2
4.2 Кінетична енергія поступального руху
У відповідності з основним законом динаміки сила F надає тілу таке прискорення, що
F=ma=m │ *dS
F dS = m dV  = mV dV
= mV dV
dA = mV dV
про інтегруємо цей вираз:

Використовуючи зв’язок між А і Е:
 (4.3)
(4.3)
Знайдемо роботу, яка виконується силою пружності.
4.3 Потенційна енергія пружної деформації
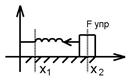
|
де dA – елементарна робота
dX – елементарне переміщення
dA = Fпр. dx
Повна робота Fупр:

 (4.4)
(4.4)
4.4 Закон збереження механічної енергії
Механічна енергія складається із потенціальної і кінетичної енергії і змінюється в результаті дії на тіло системи фізичних сил. Робота цих сил – міра зміни енергії.
Розглянемо зміну повної механічної енергії системи під дією сили тяжіння:
Емех.= Епот.+Екін.
Під дією сили тяжіння відбувається зменшення потенційної енергії і збільшення кінетичної енергії.
Знайдемо швидкість, з якою змінюються ці енергії:
dEкін. /dt =m/2 . 2V(dV/dt) = mVa = mgV
Якщо опором повітря при русі тіла можна знехтувати, то єдина сила, яка повідомляє тілу прискорення – сила тяжіння.
ma=mg
Швидкість зміни потенційної енергії:
dEпот./dt=(mgh)d/dt=mg dh/dt= -mgV
dh/dt<0, так як висота зменшується.
Тоді повне зменшення механічної енергії протягом часу t:
dEмех /dt= dEпот /dt+dEкін /dt = mdV- mgV =0 =>
dEмех / dt = 0
Відповідно, дія сили тяжіння приводить до зміни потенційної і кінетичної енергії тіла, але повна механічна енергія тіла залишається величиною постійною.
Аналогічний результат можна отримати, розглядаючи рух тіла під дією сили тяжіння.
В природі існують сили, дії яких не приводять до зміни повної механічної енергії. Такі сили отримали назву консервативних або потенційних. Особливістю консервативних сил є незалежність роботи цих сил від форми траєкторії по якій рухається тіло.
Розглянемо цю особливість на прикладі:
Знайдемо роботу тіла при переміщенні із точки 1 в точку 2 по траєкторії 1-3-2
А1-3-2=А1-3+А3-2
А1-3=mgΔh = 0 (так як висота не змінюється =>∆h = 0)
A3-2=mg∆h=mg(h1-h2) =>
A1-3-2=mg(h1-h2)
Знайдемо роботу при переміщенні із точки 1 в точку 2 по траєкторії 1-4-2:
А1-4-2=А1-4+А4-2
A1-4=mg∆h=mg(h1-h2)
A4-2=mg∆h = 0(∆h=0)
A1-4=2= mg(h1-h2)
A1-3-2=A1-4-2
Відповідно робота потенційних сил не залежить від форми траєкторії, а залежить від початкового і кінцевого положення тіла.
Умова незалежності повної механічної енергії від руху під дією консервативних сил отримало назву закону збереження механічної енергії: повна механічна енергія замкнутої системи тіл між якими діють тільки консервативні сили залишається постійною в будь-який момент часу.
Системи тіл, в яких виконується цей закон називаються консервативними.
На відміну від консервативних сил пружності і всесвітнього тяжіння, дія сили тертя приводить до зміни механічної енергії.
Якщо між тілами системи діє сила тертя, то механічна енергія цієї системи перетворюється в теплову і витрачається на нагрівання тіл, зміну їх агрегатного стану і передається навколишньому середовищу.
Мірою переходу механічної енергії в теплову є робота сили тертя:
Атер = ∆Емех =Q
Системи тіл, в яких є тертя – не консервативні.
В таких системах механічна енергія не зберігається, але зберігається повна енергія системи, що складається з механічної і теплової.
Як приклад законів збереження енергії і імпульсу розглянемо пружний і не пружний удар тіл.
Абсолютно пружний удар – це зіткнення двох абсолютно пружних тіл, тобто тіл, деформація яки є абсолютно пружною.
В момент удару кінетична енергія частково переходе у потенційну енергію пружної деформації цих тіл, виникаючі при цьому в тілах сили пружності приводять до перетворення потенційної енергії пружної деформації у кінетичну, при цьому втрати механічної енергії не відбуваються і залишкові деформації в тілах не відбуваються.
Отже, для такої взаємодії можна записати закон збереження та імпульсу:



Знайдемо, використовуючи цю систему рівнянь, швидкості тіл після удару:
 *
*
 ’) =
’) = ’) **
’) **

 З рівняння * слідує
З рівняння * слідує  *
*
Щоб знайти  використовуємо систему ** *
використовуємо систему ** *






** * ⇒
⇒
+ ⇒


 =
=
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1882; Нарушение авторских прав?; Мы поможем в написании вашей работы!