КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Магнитные индукционные преобразователи (МИП)
|
|
|
|
В основе работы МИП лежит закон электромагнитной индукции, согласно которому ЭДС, наведенная в замкнутом контуре  , пропорциональна изменению во времени сцепления этого контура с магнитным потоком:
, пропорциональна изменению во времени сцепления этого контура с магнитным потоком:
 . .
|
В случае, когда охватывающий площадь  контур сохраняет свой размер и не меняет положения относительно вектора
контур сохраняет свой размер и не меняет положения относительно вектора  , появляется т.н. трансформаторная ЭДС:
, появляется т.н. трансформаторная ЭДС:
 , ,
|
вызванная изменением индукции во времени, т.е. в переменных поля.
Если  , то изменение магнитного потока во времени достигают поворотом контура вокруг оси, перпендикулярной вектору . Здесь возникает т.н. ЭДС движения:
, то изменение магнитного потока во времени достигают поворотом контура вокруг оси, перпендикулярной вектору . Здесь возникает т.н. ЭДС движения:
 . .
|
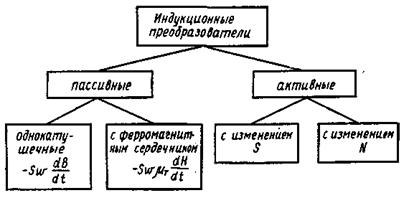
МИП, использующие трансформаторную ЭДС  , называют пассивными, их можно применять только в переменных магнитных полях. МИП, использующие ЭДС движения
, называют пассивными, их можно применять только в переменных магнитных полях. МИП, использующие ЭДС движения  , называют активными, их можно использовать для измерения постоянных магнитных полей.
, называют активными, их можно использовать для измерения постоянных магнитных полей.
Пассивные МИП в простейшем случае представляют катушку, размеры которой достаточно малы, чтобы считать магнитное поле в ней однородным и находить индукцию простым делением магнитного потока на площадь сечения катушки. Как правило, это короткие однослойные катушки, намотанные тонким проводом, толщина намотки которых пренебрежимо мала по сравнению с диаметром катушки.
В случае, когда ось катушки составляет с направлением вектора угол  , имеем
, имеем
 , ,
|
где – площадь одного витка катушки;  – число витков. Поворотом катушки легко определить направление индукции, соответствующее положению оси катушки, при котором ЭДС максимальна.
– число витков. Поворотом катушки легко определить направление индукции, соответствующее положению оси катушки, при котором ЭДС максимальна.
При повороте катушки вокруг оси, перпендикулярной вектору характер изменения ЭДС определяется диаграммой направленности, рис. 16. В случае, когда между направлениями оси катушки и вектора имеется угол  , ЭДС равна
, ЭДС равна
|
|
|
 . .
|
Увеличением числа витков увеличивают ЭДС, что удобно для последующих измерений. При этом размеры катушки должны быть меньше размеров области, где поле можно считать однородным.
При измерении в слабых полях может оказаться, что и большом числе витков ЭДС мала. Для ее увеличения внутри катушки помещают ферромагнитный сердечник, при этом магнитная индукция в сердечнике возрастает, но не в  раз, а соответственно
раз, а соответственно
 , ,
|
где  – магнитная проницаемость тела;
– магнитная проницаемость тела;  – коэффициент размагничивания, определяемый размерами сердечника. Для цилиндрического сердечника длиной
– коэффициент размагничивания, определяемый размерами сердечника. Для цилиндрического сердечника длиной  и диаметром
и диаметром  :
:
 , где , где  . .
|
Выходной сигнал пассивного преобразователя с сердечником
 . .
|
Коэффициент преобразования такого МИП равен множителю перед производной  , он зависит от , т.е. от размеров и формы сердечника.
, он зависит от , т.е. от размеров и формы сердечника.
Кроме однокатушечных пассивных преобразователей для оценки изменений магнитной индукции в пространстве применяют двухкатушечные дифференциальные МИП. При встречном включении катушек выходной сигнал такого преобразователя равен
 . .
|
Несмотря на то, что используемые катушки одинаковые, напряженность поля в местах их размещения может быть различной.
Часто возникают задачи измерения параметров постоянных полей (при намагничивании и особенно при размагничивании деталей после НК). Для этих целей используют активные индукционные преобразователи. Существует два основных типа активных индукционных преобразователей (рис. 17). В них ЭДС возникает за счет изменения:
1.– скалярного произведения  , т.е. практически за счет изменения площади S;
, т.е. практически за счет изменения площади S;
2.– за счет изменения магнитной проницаемости .
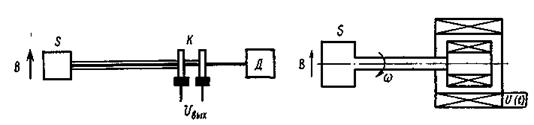
Примером первого типа является преобразователь с вращающейся катушкой, называемый измерительным генератором. На рис. 18 катушка вращается двигателем. Выходной сигнал снимается с колец и скользящих контактов (К). При угловой частоте  напряжение на скользящих контактах
напряжение на скользящих контактах
|
|
|
 . .
|
| Рис. 17. Основные типы индукционных преобразователей |
Чувствительность МИП можно повысить, увеличивая частоту вращения. Если измеряется только модуль выходного напряжения, то преобразователь является модульным, если измеряется и его фаза, то его можно использовать как компонентный.
| |
| Рис. 18. Схема измерительного генератора | Рис. 19. Измерительный генератор с трансформатором |
Основной недостаток этого преобразователя – электрические шумы, возникающие в скользящих контактах. Его устраняют, используя для снятия выходного сигнала трансформатор (рис. 19). Первичная обмотка трансформатора закреплена на валу индукционного преобразователя и вращается вместе с ним, вторая неподвижна. Такие МИП позволяют измерять в слабых полях (~ 10–4 Тл) с погрешностью ~ 1%. Мешающим фактором являются поля рассеяния, создаваемые двигателем, который необходимо экранировать.
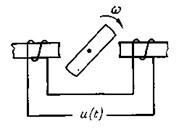
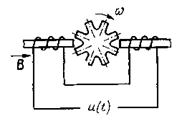
Во втором типе активных индукционных преобразователей меняется магнитное сопротивление за счет изменения положения ферромагнитного сердечника. Простейший преобразователь показан на рис. 20 и представляет катушку с ферромагнитным сердечником, средняя часть которого подвижна и может вращаться вокруг поперечной оси. Здесь коэффициент размагничивания изменяется во времени, выходной сигнал изменяется дважды за один оборот сердечника. Измеряя на второй гармонике, удается отфильтровать наводки, создаваемые двигателем на основной частоте. Формой сердечника можно повысить частоту сигнала, рис. 21.
|
| |||
| Рис. 20. Преобразователь с ферромагнитным сердечником | Рис. 21. Повышение частоты сигнала изменением формы сердечника |
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1511; Нарушение авторских прав?; Мы поможем в написании вашей работы!