КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Микропроцессорные устройства
|
|
|
|
Сам по себе микропроцессор без устройств, обеспечивающих его взаимодействие с внешним миром, не представляет никакой пользы. Данные и программа их обработки поступают от внешних источников информации; результаты обработки тоже воспринимаются внешними устройствами. Всё вместе: микропроцессор, содержащий АЛУ и УУ, память, необходимые устройства ввода-вывода представляют собой микропроцессорное устройство (МПУ), способное автономно принимать, обрабатывать и передавать информацию (рис. 10.2.).

Рис. 10.2. Структурная схема микропроцессорного
устройства
Если МПУ управляет каким-либо оборудованием, например, по заданной программе переключает сигналы светофора, ему нужны только соответствующие коммутаторы в качестве УВВ, минимум памяти для несложной программы и самый простейший микропроцессор. Обычно такие МПУ наываются микропроцессорными контроллерами, или просто микроконтроллерами.
Устройство ввода и вывода, связывающее МПУ с внешним миром, обычно делят на две части: интерфейс и само внешнее или периферийное устройство. Интерфейс (interface – средство сопряжения) предназначен для преобразования сигналов от МП в сигналы, воспринимаемые внешним устройством и наоборот. Часть интерфейса, непосредственно воспринимающая сигналы МП и передающая ему сигналы, называется портом УВВ. В зависимости от того, какое устройство связывается с МП, интерфейсы могут разделяться как по принципу передачи информации, так и по ее виду. Если интерфейс служит для передачи или приема данных в цифровой форме, то это обычно параллельный или последовательный интерфейс. Параллельный интерфейс передает или принимает сразу все двоичные разряды числа (количество же разрядов в числе, конечно, ограничено), а последовательный интерфейс растягивает передачу или прием во времени, передавая последовательно разряд за разрядом или бит за битом.
|
|
|
В микропроцессорных контроллерах, управляющих оборудованием, набор внешних устройств гораздо более широкий. Для их реализации требуется гораздо больше различных интерфейсов. Рассмотрим схему подключения внешних устройств микропроцессора регулятора частоты вращения двигателя постоянного тока с защитой по температуре перегрева. Общая схема такого МПУ показана на рис. 10.3. Чтобы двигатель подключить к источнику питания и выбрать направление вращения, необходимо включить одно из реле К1 или К2. Обмотки реле потребляют достаточно большую мощность, поэтому их невозможно непосредственно подключить к параллельному интерфейсу (Порт 1), приходится ставить промежуточные усилители – транзисторные ключи. Когда оба реле К1 и К2 обесточены – якорь двигателя не вращается. Включение только одного из реле приводит к замыканию контактов К1.1 и К1.2 (или К2.1 и К2.2) и пуску двигателя в том или ином направлении.
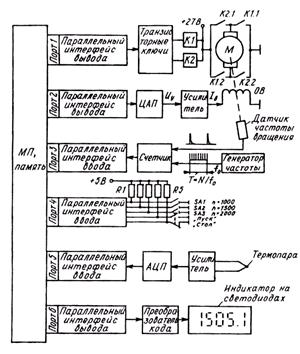
Рис. 10.3. МПУ управления двигателем
Чтобы плавно изменять ток возбуждения IВ на выход соответствующего (Порт 2) параллельного интерфейса подключается цифроаналоговый преобразователь ЦАП, преобразующий цифровой код в пропорциональное ему напряжение UУ. Но сигнал с выхода ЦАП недостаточно мощный, он усиливается при помощи транзисторного усилителя аналоговых сигналов. Теперь становится возможным регулировать и автоматически стабилизировать частоту вращения двигателя в зависимости от момента нагрузки на его валу (в определённом диапазоне), изменяя ток возбуждения Iв в независимой обмотке возбуждения 0В.
Обратная связь по частоте вращения двигателя осуществляется при помощи Датчика частоты вращения (вал двигателя и вал датчика частоты вращения соединены механически), выдающего на своем выходе сигнал, частота которого прямо пропорциональна частоте вращения вала двигателя. Этот сигнал преобразуется в импульсную форму и подаётся на вход Электронного счётчика импульсов. Кроме того, на другой вход счётчика с Генератора частоты подаются импульсы стабильной частоты fо, на 2-3 порядка превышающей частоту сигнала с датчика частоты вращения. Счётчик подсчитывает число импульсов N частоты fо, появляющиеся между двумя соседними импульсами с датчика, и передает число N через параллельный интерфейс (Порт 3) в МП. Микропроцессор рассчитывает период вращения двигателя Т = N / fо, использует это значение для управления током возбуждения Iв и выводит его на светодиодное табло – индикатор частоты вращения.
|
|
|
Внешнее управление поддерживаемой частотой вращения осуществляется при помощи ключей (кнопок) SA1, SA2 и SAЗ. При замыкании того или иного ключа МП через параллельный интерфейс получает сигнал о поддерживаемой (стабилизируемой) частоте вращения. Микропроцессор периодически опрашивает Порт 4 и следит, не изменилось ли состояние этих ключей. Кстати, изменение состояния кнопок SA1, SA2, SAЗ, «Пуск» и «Стоп» производится пользователем (оператором).
Чтобы контролировать тепловой режим работы двигателя, в него введена термопара. Сигнал с термопары (ЭДС термопары), составляющий несколько милливольт, первоначально усиливается, а затем обрабатывается при помощи аналого-цифрового преобразователя АЦП. АЦП преобразует напряжение, пропорциональное температуре, в соответствующий цифровой код, и этот код через параллельный интерфейс (Порт 5) становится доступным МП. В случае перегрузки двигателя по току якоря и возрастания температуры (и ЭДС термопары соответственно) МП выдаёт сигнал через Порт 1 и параллельный интерфейс на отключение реле К1 или К2.
Для индикации режимов работы (например, частоты вращения) применяется цифровой индикатор на светодиодах, высвечивающий те числа, коды которых передаются через Порт 6 и параллельный интерфейс. Для преобразования двоичного кода в изображение соответствующих ему цифр на табло используется Преобразователь кода, реализованный на микросхеме.
Контрольные вопросы:
1. Назовите основную часть процессора.
2. Для чего предназначен интерфейс?
3. Что применяется для индикации режимов работы?
Домашнее задание:
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1894; Нарушение авторских прав?; Мы поможем в написании вашей работы!