КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Состав систем автоматики
Москва 2007 г.
КУРС ЛЕКЦИЙ
МИСиС
Технические средства автоматизации
ОГЛАВЛЕНИЕ
Раздел 1. Классификация, назначение, основные характеристики типовых технических средств автоматизации
1.1. Состав систем автоматики…….……………………………………………………………….4
1.2. Статические характеристики………………………………………………….……………….6
1.3. Динамические характеристики………………………………………………………………...8
1.4. Обратная связь в системах автоматики………………………………………………………10
1.5. Надежность элементов систем автоматики………………………………………………….12
Раздел 2. Электрические, электронные, пневматические, гидравлические, и комбинированные средства автоматизации
2.1. Электрические датчики………………………………………………………………………..14
2.2. Электронные усилители……………………………………………………………………….34
2.3. Магнитные усилители. ………………………………………………………………………..43
2.4. Электромашинные усилители…………………………………………………………………48
2.5. Гидравлические и пневматические усилители……………………………………………….51
2.6. Реле………………………………………………………………………………………………53
Раздел 1. Классификация, назначение, основные характеристики типовых технических средств автоматизации
Системы автоматики предназначены для получения информации о ходе управляемого процесса, ее обработки и использования при формировании управляющих воздействий на процесс. В зависимости от назначения различают следующие автоматические системы.
Системы автоматической сигнализации предназначены для извещения обслуживающего персонала о состоянии той или иной технической установки, о протекании того или иного процесса.
Системы автоматического контроля осуществляют без участия человека контроль различных параметров и величин, характеризующих работу какого-либо технического агрегата или протекание какого-либо процесса.
Системы автоматической блокировки и защиты служат для предотвращения возникновения аварийных ситуаций в технических агрегатах и установках.
Системы автоматического пуска и остановки обеспечивают включение, остановку (а иногда и реверс) различных двигателей и приводов по заранее заданной программе.
Системы автоматического управления предназначены для управления работой тех или иных технических агрегатов либо теми или иными процессами.
Важнейшими и наиболее сложными являются системы автоматического управления. Управлением в широком смысле слова называется организация какого-либо процесса, обеспечивающая достижение поставленной цели.
Общие законы получения, хранения, передачи и преобразования информации в управляющих системах изучает кибернетика. Таким образом, изучение систем автоматики также является одной из задач кибернетики. Технические средства, с помощью которых построены автоматические системы, называются элементами автоматики.
Рассмотрим назначение этих элементов в системе автоматического регулирования. Работа любого технического агрегата или ход любого технологического процесса характеризуются различными физическими величинами, например температурой, давлением, скоростью, расходом вещества. Эти величины должны поддерживаться на заданном уровне или изменяться по заданному закону.
С помощью системы автоматического регулирования (САР) автоматически решаются задачи изменения какой-либо физической величины по требуемому закону. Физическая величина, подлежащая регулированию (изменению по заданному закону) в САР, называется обычно регулируемой величиной, а технический агрегат, в котором осуществляется автоматическое регулирование, - объектом регулирования. Автоматическое регулирование является частным случаем автоматического управления. Цель управления в этом случае как раз и заключается в обеспечении требуемого закона изменения регулируемой величины.
Обозначим через у(t) функцию, описывающую изменение во времени регулируемой величины, т. е. y(t) - регулируемая величина. Через g(t) обозначим функцию, характеризующую требуемый закон ее изменения. Величину g(t) будем называть задающим воздействием. Тогда основная задача автоматического регулирования сводится к обеспечению равенства y(t)=g(t). Большинство САР решают эту задачу, используя принцип регулирования по отклонению. Функциональная схема такой САР показана на рис.1.1.
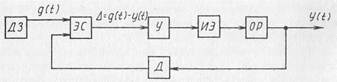
Рис. 1.1. Функциональная схема системы автоматического регулирования
Суть принципа регулирования по отклонению заключается в следующем. Регулируемая величина y{t) измеряется с помощью датчика Д и поступает на элемент сравнения (ЭС). На этот же элемент сравнения от датчика задания (ДЗ) поступает задающее воздействие g(t). В ЭС величины g(t) и y(t) сравниваются, т. е. из g(t) вычитается y{t). На выходе ЭС формируется сигнал, равный отклонению регулируемой величины от заданной, т. е. ошибка A = g(t)-y(t). Этот сигнал поступает на усилитель (У) и затем подается на исполнительный элемент (ИЭ), который и оказывает регулирующее воздействие на объект регулирования (ОР). Это воздействие будет изменяться до тех пор, пока регулируемая величина y(t) не станет равна заданной g(t). На объект регулирования постоянно влияют различные возмущающие воздействия: нагрузка объекта, внешние факторы и др. Эти возмущающие воздействия стремятся изменить величину у(t). Но САР постоянно определяет отклонение y(t) от g(t) и формирует управляющий сигнал, стремящийся свести это отклонение к нулю. По своему назначению элементы, входящие в состав систем автоматики, разделяются на чувствительные, усилительные и исполнительные.
Датчики являются чувствительными элементами. Они измеряют регулируемую величину объекта регулирования и вырабатывают на выходе сигнал, пропорциональный этой величине. Входной величиной датчика может быть любая физическая величина: механическое перемещение, температура, давление, расход, влажность, усилие и др. Датчики могут использоваться и для формирования задающего воздействия. Входной сигнал в этом случае может поступать от задатчика, с перфорированной или магнитной ленты, от управляющей вычислительной машины. Сравнение регулируемой величины и задающей величины осуществляется в элементе сравнения, в качестве которого используется измерительная схема, формирующая сигнал ошибки (отклонения). Полученный сигнал ошибки обычно недостаточен по мощности для создания регулирующего воздействия, поэтому его необходимо усилить. Для этого служат усилительные элементы. Исполнительные элементы воздействуют на объект регулирования в направлении восстановления требуемого значения регулируемой величины. Обычно такое воздействие заключается в перемещении какого-либо регулирующего органа - заслонки, клапана и т. п.
Системы автоматики могут быть построены с использованием сигналов различной физической природы: электрических, механических, пневматических, гидравлических. Наибольшее распространение получил электрический сигнал: его удобно передавать на расстояние, обрабатывать и запоминать, преобразовывать в другие виды сигналов. Поэтому электрические элементы автоматики получили самое широкое распространение.
Одним из основных и важнейших видов электрических элементов являются электромеханические и магнитные элементы, использующие электрические и магнитные явления. Подавляющее большинство различных неэлектрических величин может быть преобразовано в электрический сигнал с помощью электромеханических и магнитных датчиков. Усиление электрических сигналов может быть обеспечено с помощью магнитных или релейных усилителей, построенных на электромагнитных реле. Наряду с магнитными большое распространение получили полупроводниковые усилители, являющиеся более перспективными. В процессе усиления порой возникает задача преобразования электрического сигнала. Для этой цели служат магнитные модуляторы и электронные схемы.
В качестве исполнительных элементов наибольшее распространение получили электромагниты и электродвигатели. Для различных переключений в системах автоматики широко применяют коммутационные электромеханические элементы и электронные коммутаторы.
|
Дата добавления: 2014-01-11; Просмотров: 4595; Нарушение авторских прав?; Мы поможем в написании вашей работы!