КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управляющие автоматы с жесткой логикой управления
В основе построения УА с жесткой логикой (ЖЛ) управления лежит теория конечных (цифровых) автоматов. Наибольшую известность имеют конечные автоматы Мили и Мура.
Закон функционирования автомата Мили задается функциями:
А(t+1) = δ (A(t), X(t)) – функция переходов,
Y(t+1) = λ (A(t), X(t)) – функция выходов,
Здесь t = 0, 1, 2, … -автоматное время,
А = {а1, а2, …, аN} – множество состояний автомата, N – конечно,
А(0) = а1 – начальное состояние автомата,
Х = {х1, …, хL} – входной алфавит автомата,
Y = {y1, …, yM} – выходной алфавит автомата.
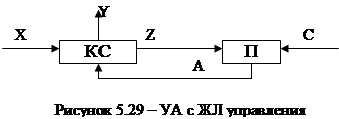 |
Чтобы построить УА с ЖЛ, необходимо задать функцию переходов δ и функцию выходов λ автомата. Определение функций λ, δ легко производится по ГСА операций fg ОУ. Техническая реализация функций автомата Мили приводит к структуре УА с ЖЛ (рисунок 5.29).
Выходной алфавит Y интерпретируется как совокупность выходов УА, с помощью которых управляющие сигналы y1 … yM подаются в ОА.
Входной автомат Х интерпретируется как совокупность осведомительных сигналов x1 … xL, поступающих на вход комбинационной схемы КС в качестве аргументов булевских функций y1, …, yM, аргументами которых является еще и информация о состоянии автомата в момент времени t: A(t).
Для отображения состояния автомата используется память П, реализуемая на триггерах, количество которых n = log2N зависит от множества состояний. Переход из одного состояния ai в другое aj осуществляется под воздействием сигналов Z, которые формируются на выходах КС, реализующих булевы функции в соответствии с функцией переходов d автомата.
Сигналы синхронизации С имитируют автоматное время t.
Следует отметить, что переход от функции ОА, которая задается набором ГСА1 … ГСАG к структуре УА с ЖЛ, т. е. конкретной конфигурации комбинационных схем, реализующих функции Y и Z, формализован и, следовательно, может быть автоматизирован. Это позволяет получать схемы УА автоматически: на входе системы набор ГСА, а на выходе – документация, схема УА (фактически это САПР УА с ЖЛ). [С. И. Баранов. Синтез микропрограммных автоматов. - Л: Энергия, 1979].
Характеристики УА с ЖЛ – быстродействие и затраты оборудования. Быстродействие УА с ЖЛ характеризуется временем формирования управляющих сигналов ym:
ty = tТР + 2tАЭ = 5tАЭ,
где tТР - время переключения триггеров памяти, tЛЭ - задержка одного логического элемента в КС УА.
5.9.4
Сравнение характеристик управляющих автоматов с программируемой и жесткой логикой
Сравнение выполним по быстродействию и затратам оборудования.
По быстродействию:
Разность ∆t = ТЖЛ – ТПЛ > 5tПЗУ, т. е. время формирования управляющих сигналов в УА с ЖЛ меньше по крайней мере на величину tПЗУ - время выборки из ПЗУ, что существенно меньше. Следовательно, УА с ЖЛ обладают большим быстродействием, чем УА с ПЛ.
По затратам оборудования С. Количество оборудования С в УА с ЖЛ пропорционально сложности микропрограмм S (рисунок 5.30). В УА с ПЛ оно зависит от сложности микропрограмм, определяемой количеством микрокоманд. Длина микрокоманды логарифмически зависит от количества МО М, числа ЛУ L, емкости ПЗУ. На рисунке 5.29 S* - характерная точка, точка пересечения линий, которая означает, что затраты оборудования в УА с ПЛ до точки S* больше, а после нее меньше, причем разница в затратах тем больше, чем выше сложность УА. Следовательно, с точки зрения затрат оборудования УА с ПЛ экономнее, чем УА с ЖЛ. Отсюда область их применения: если целью проектирования является высокое быстродействие, то следует использовать УА с ЖЛ, если критерий проектирования – минимальные затраты оборудования, то – УА с ПЛ.
|
|
Дата добавления: 2014-01-11; Просмотров: 1404; Нарушение авторских прав?; Мы поможем в написании вашей работы!