КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Распределение набросов активной нагрузки между агрегатами электростанций
Действительный график нагрузки энергосистемы не совпадает с заданным диспетчерским графиком. Поэтому периодически возникают те или иные небалансы мощности турбин и нагрузок генераторов электростанций. Следствием этого являются колебания частоты в системе. Основное уравнение баланса мощности для отдельного агрегата имеет вид:
 ,
,
где  – активная мощность, развиваемая турбиной, отн. ед.; P – электрическая (тормозная) мощность генератора, отн. ед.;
– активная мощность, развиваемая турбиной, отн. ед.; P – электрическая (тормозная) мощность генератора, отн. ед.;  – потери в агрегате, отн. ед.;
– потери в агрегате, отн. ед.;  – постоянная инерции (механическая постоянная) вращающихся масс турбины и генератора, рад;
– постоянная инерции (механическая постоянная) вращающихся масс турбины и генератора, рад;  – демпферный коэффициент; d – угол определяющий пространственное положение продольной оси ротора генератора, рад.
– демпферный коэффициент; d – угол определяющий пространственное положение продольной оси ротора генератора, рад.
Постоянная инерции турбины и генератора определяется выражением:
 ,
,
где n 0, n ном – синхронная и номинальная частоты вращения; P ном – номинальная мощность агрегата;  – суммарный момент инерции турбины и генератора.
– суммарный момент инерции турбины и генератора.
Умножение на синхронную угловую скорость вращения ротора w0 дает в радианах. Пренебрегая в первом приближении потерями мощности в агрегате и демпферной мощностью, получаем:
или
 ,
,
где a – угловое ускорение вращающихся масс.
Внезапные набросы – сбросы нагрузки вызывают торможение – ускорение роторов генераторов; тем самым энергия вращающихся масс участвует в покрытии кратковременно возникающего небаланса мощности.
Тормозная мощность или мощность нагрузки генераторов зависит от частоты:
 .
.
Реактивная мощность также зависит от частоты:
 .
.
причем обычно n = 1¸2. Изменение активной и реактивной мощностей нагрузки генератора с изменением частоты рассмотрено ниже.
Рассмотрим систему с одним генератором. Частотная характеристика регулятора скорости первичного двигателя имеет вид – рис.1:
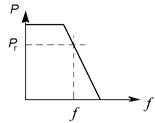
Рис. 1. Частотная характеристика регулятора скорости
На рисунке 2 представлена частотная характеристика активной и реактивной нагрузки с учетом потерь в сетях:
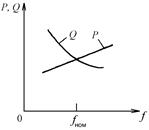
Рис. 2. Изменение активной и реактивной мощностей при изменении частоты в системе
Накладывая характеристики активной мощности друг на друга, получим точку пересечения (рис. 3), определяющую действительную частоту:
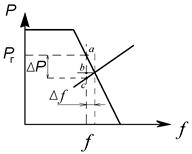
Рис. 3. Совмещенные частотные характеристики регулятора скорости и нагрузки
При снижении частоты на D f величина P Г растет, а P Н падает. Отрезок ac определяет дополнительную нагрузку D P, вызвавшую снижение частоты на величину D f.
Мощность, развиваемая турбиной в продолжительном режиме, зависит от пропуска пара или воды через турбину, который регулируется регулятором скорости турбины, называемым также первичным регулятором частоты.
Регуляторы могут иметь астатическую (вернее квазиастатическую) или статическую характеристику – рис. 4.
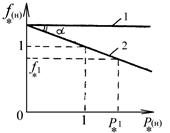
Рис. 4. Характеристики регуляторов скорости:
1 – астатическая; 2 – статическая
Статизм характеристики регулятора характеризуется коэффициентом статизма.
 ,
,
где
 ;
;  ;
;  .
.
Регуляторы скорости имеют естественную статическую характеристику, однако с помощью дополнительных устройств, называемых вторичными регуляторами частоты, можно получить результирующую астатическую (квазиастатическую) характеристику.
Следует отметить, что дежурному щита управления электростанции без помощи устройств автоматики трудно регулировать частоту в соответствии с жесткими требованиями ПУЭ и ГОСТ. Действительно, пусть допустимое отклонение частоты D f = 0,1 Гц, а статизм регулятора  . Тогда
. Тогда
 .
.
Очевидно, что по щитовому прибору дежурному трудно уследить за изменением мощности генератора на 4 %. В связи с этим возникает задача осуществления комплексных автоматических устройств для согласованного регулирования частоты и распределения активных мощностей.
|
Дата добавления: 2014-01-13; Просмотров: 692; Нарушение авторских прав?; Мы поможем в написании вашей работы!