КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронный исполнительный двигатель
|
|
|
|
Исполнительные (управляемые) асинхронные двигатели применяются в системах управления для преобразования электрического сигнала в механическое перемещение.
Требования к ним:
1. Обладать самоторможением, т.е. отсутствие самохода.
Электродвигатель имеет самоход, если его ротор вращается при отсутствии сигнала управления, т.е.  , где
, где
b - угол между Uy и UB;
Uy – напряжение управления;
UB – напряжение возбуждения;
 - эффективный коэффициент сигнала.
- эффективный коэффициент сигнала.
Встречается два вида самохода: методический и технологический.
Методический самоход проявляется при снятии сигнала управления, причина – недостаточно большое сопротивление ротора. Чтобы электродвигатель не имел самохода, надо, чтобы SКР > 1. (т.е. причина - неправильный выбор параметров).
Критерий отсутствия самохода при любом скольжении:

Технологический самоход проявляется сразу после включения в сеть ОВ, когда сигнал еще не подан. Причина – слабое эллиптическое поле, наличие короткозамкнутых витков, неодинаковая проводимость, разная толщина стенок полого ротора и т.д. Устранение – качественное изготовление деталей, изоляции, сборка и т.д.
2. Широкий диапазон регулирования частоты вращения nmax/nmin=100…200
3. Устойчивость работы во всем диапазоне рабочих частот вращения.
4. Большой пусковой момент.
5. Хорошее быстродействие, т.е. ротор должен обладать малым моментом инерции.
Обычно в машинах малой мощности скоростью протекания электромагнитных процессов можно пренебречь по сравнению с электромеханическими процессами, т.к. постоянные времени процессов
ТЭ << ТМ
 , где
, где 
 - момен инерции двигателя;
- момен инерции двигателя;
М ПУСК 0 – пусковой момент при круговом вращающемся поле;
|
|
|
ТЭ – постоянная времени протекания электромангнитных процессов;
 = 0,01..0,15 сек для двигателей с полым ротором;
= 0,01..0,15 сек для двигателей с полым ротором;
ТМ – электромеханическая постоянная времени, которая определяется временем разгона ротора двигателя от w = 0 до w = 0,633 wхх (wхх - скорость холостого хода)
Если сравнить электродвигатель постоянного тока и переменного тока, то J~ < J=, поэтому  . Но постоянная меньше ненамного, т.к. МПУСК при постоянном токе в 2…4 раза больше, чем у электродвигателя переменного тока.
. Но постоянная меньше ненамного, т.к. МПУСК при постоянном токе в 2…4 раза больше, чем у электродвигателя переменного тока.
6. Малая мощность управления.
7. Надежность в работе
8. Максимальная линейность механических и регулировочных характеристик.
9. Малые габариты и вес.
Особенности конструкции:
Асинхронные исполнительные двигатели - это двухфазные электродвигатели, имеющие на статоре две сдвинутые в пространстве на 90 электрических градусов обмотки: ОВ – обмотку возбуждения, непосредственно подключаемую к сети и ОУ – обмотку управления, на нее сигнал подается лишь тогда, когда необходимо вращение ротора. Управляющий сигнал изменяется по величине или фазе.
Особенность режима работы
Рисунок 2.3.1 асинхронного исполнительного двигателя в том что, они почти никогда не работают в номинальном режиме при номинальной частоте вращения. Для асинхронного исполнительного двигателя харак-
терны частые пуски, остановки, реверсы, которые сопровождаются переходными процессами.
С целью уменьшения времени переходных процессов асинхронный исполнительный двигатель стараются сделать малоинерционными, следовательно, они никогда не снабжаются вентиляторами.
Для работы асинхронного исполнительного двигателя необходимо получить вращающееся магнитное поле, т.е. надо сдвинуть токи в обмотке возбуждения и
Рисунок 2.3.2 обмотке управления во времени.
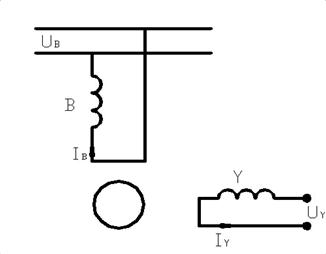
Сдвиг токов осуществляется за счет схем управления, фазовращателей, конденсаторов, преобразователей. Максимальная полезная мощность Р2max достигается при сдвиге IY и IB на 90° и при равенстве амплитуд МДС обмоток Fym = FBm.
|
|
|
Управление можно осуществить одним из трех способов:
1. Амплитудное управление – изменение величины (амплитуды) UY при
неизмененной его фазе (рис. 2.3.2)
Обмотка возбуждения подключается к сети UB=U1. На обмотку управления подключается UУ, сдвинутое на b=90° относительно UB.
Величину UУ (переменную) оценивают эффективным коэффициентом сигнала:
 , где
, где  .
.
Круговое вращающееся поле при амплитудном управлении имеет место при  , т.е. когда приведенные к одному числу витков UУ и UB равны по величине.
, т.е. когда приведенные к одному числу витков UУ и UB равны по величине.
Напряжение управления, соответствующее круговому полю, называется номинальным (UУО). При всех других напряжения UУ поле эллиптическое.
 Реверс асинхронного исполнительного двигателя при амплитудном управлении достигается путем изменения фазы UУ на 180°.
Реверс асинхронного исполнительного двигателя при амплитудном управлении достигается путем изменения фазы UУ на 180°.
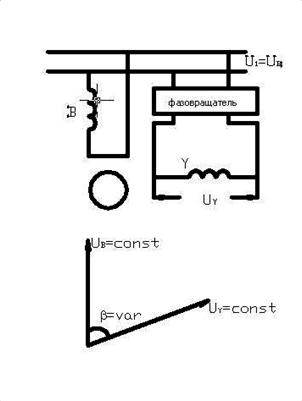
2. Фазовое управление – изменение фазы UУ при неизменной его величине (рис.2.3.3)
На обмотку В подается UB=U1=const. На обмотку управления подается постоянное по значению (амплитуде), но переменное по фазе UУ = U’B = UB/k.
Управление электродвигателем осуществляется изменением угла b. Величина UУ обычно оценивается коэффициентом сигнала, который равен sinb.
При сдвиге UУ и UB на 90°, т.е. sinb = 1 – имеем круговое вращающееся поле.
при 0 < sinb < 1 – поле эллиптическое;
при sinb = 0 – поле пульсирующее;
при sinb < 0 электродвигатель меняет направление вращения.
Рисунок 2.3.3
3. Амплитудо-фазовое управление – одновременное изменение амплитуды UУ и угла и сдвига b (рис.2.3.4)
Последовательно с обмоткой возбуждения включается фазосдвигающий конденсатор, следовательно, меняется b, а UУ изменяется по амплитуде.
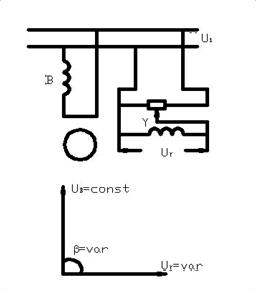
Это объясняется тем, что при изменении нагрузки (частоты вращения) или UУ изменяется падение напряжения на конденсаторе, а, следовательно, и  :
:
Рисунок 2.3.4
Регулирование частоты вращения асинхронного исполнительного двигателя при всех способах управления происходит за счет изменения вращающегося магнитного поля. Поле из кругового превращается в эллиптическое, следовательно, растет обратное поле и падает частота вращения.
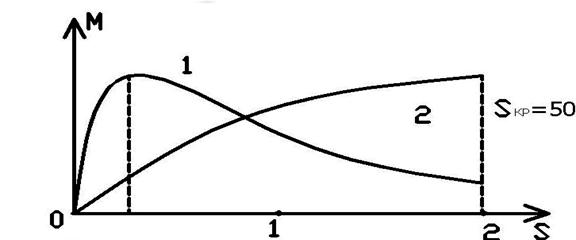
Рисунок 2.3.5.
|
|
|
На рисунке 2.3.5. изображены механические характеристики: (1) – обычного асинхронного двигателя и
(2) – асинхронного исполнительного двигателя(SКР всегда>1), следовательно двигатель будет устойчиво работать при любых скольжениях.
В зависимости от конструкции асинхронные исполнительные двигатели делятся на:
1. Двигатели с полым немагнитным ротором.
2. Двигатели с полым ферромагнитным ротором.
3. Двигатели с обычным короткозамкнутым ротором в виде «беличьей клетки».
2.3.1. Асинхронный исполнительный двигатель с полным немагнитным ротором
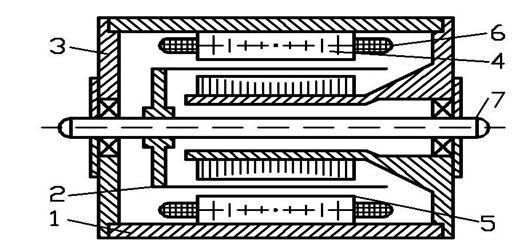
Рисунок 2.3.1.1
Асинхронный исполнительный двигатель с полым немагнитным ротором
(рис.2.3.1.1) состоит из внешнего статора 4; внутреннего статора – сердечника 5; ротора, выполненного в виде полого немагнитного цилиндра 2 (тонкостенный стакан); подшипниковых щитов 3; и вала 7. В пазах статора располагаются его обмотки 6:обмотки управления и обмотки возбуждения. Внутренний статор 5 набран из листов электротехнической стали. Полый ротор выполняют из сплавов алюминия. Толщина стенок ротора D = 0,15…0,5 мм. Воздушный зазор d = d1+d2+D = 0,35…1 мм. Этот воздушный зазор больше в 3 раза, чем у обычных асинхронных двигателей.
d1 – между внешним статором и ротором
d2 – между ротором и внутренним статором.
Так как имеется большой немагнитный промежуток, следовательно, будет большой намагничивающий ток  и низкий
и низкий  .
.
Для того чтобы уменьшить потери от большого  , увеличивают сечение провода. В таком двигателе меди больше, чем стали, площадь пазов составляет 60 - 70% от площади листа статора.
, увеличивают сечение провода. В таком двигателе меди больше, чем стали, площадь пазов составляет 60 - 70% от площади листа статора.
Полый немагнитный ротор обладает индуктивным сопротивлением значительно меньшим, чем активным (XR = 0,05…0,1 RR). Это способствует повышению качества механических и регулировочных характеристик.
Внешний статор не отличается от статора обычного асинхронного двигателя.
Внутренний статор располагается на выступе одного из подшипниковых щитов, служит для замыкания магнитного потока и уменьшения сопротивления магнитному потоку.
Принцип действия:
|
|
|
Переменный ток, протекая по обмоткам статора, создает вращающееся магнитное поле, которое огибает полый ротор и наводит в нем вихревые токи. Токи взаимодействуют с вращающимся магнитным полем, создается вращающийся момент, следовательно, ротор вращается.
Положительные свойства асинхронного исполнительного двигателя с полым немагнитным ротором:
1. Малый момент инерции ротора, который в сочетании с большим пусковым моментом обеспечивает хорошее быстродействие.
2. Сравнительно хорошая линейность механических и регулировочных характеристик.
3. Высокая чувствительность – малая величина сигнала трогания, т.к. нет радиальных сил притяжения ротора к статору (ротор немагнитный).
4. Плавность и бесшумность хода, постоянство пускового момента в любом положении ротора.
Недостатки:
1. Низкий КПД, т.к. большие потери от и большое активное сопротивление ротора.
2. Низкий 
3. Большие габариты и масса.(2 статора)
Характеристики двигателя строятся в относительных единицах. Удобство относительных единиц в том, что можно получить характеристики без относительного положения к номинальным данным:
Скорость  , где nc – частота вращения поля статора;
, где nc – частота вращения поля статора;
Момент  , где MКО – момент при круговом вращающемся поле и неподвижном роторе.
, где MКО – момент при круговом вращающемся поле и неподвижном роторе.
Эффективный коэффициент сигнала:  .
.
1. Механические характеристики ( при
при  ):
):
 Рисунок 2.3.1.2.
Рисунок 2.3.1.2.
 –это зависимость вращающего момента от частоты вращения при постоянном сигнале управления.
–это зависимость вращающего момента от частоты вращения при постоянном сигнале управления.
Максимальный момент имеет место при пуске (n=0). С повышением частоты вращения момент уменьшается и при nхх М=0. Максимальный момент и максимальную скорость электродвигатель имеет при коэффициенте сигнала равным 1; при уменьшении a происходит смещение характеристик в сторону уменьшения момента и скорости.
2. Регулировочные характеристики – зависимости частоты вращения от величины или фазы сигнала управления Uу при постоянном моменте сопротивления на валу n = f(aе) или n = f(sinb) при М = const.
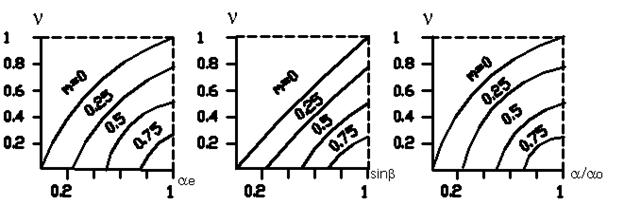 амплитудное фазовое амплитудно-фазовое
амплитудное фазовое амплитудно-фазовое
Рисунок 2.3.1.3
.Эти характеристики нелинейны при всех способах управления. Наибольшую линейность имеют характеристики при фазовом управлении; наименьшую – при амплитудно-фазовом. Регулировочные характеристики при всех способах управления имеют наиболее линейные участки при малых скоростях. UУТРºМ (моменту сопротивления)
Uутр – напряжение управления трогания – минимальное напряжение, поданное на обмотку управления, при котором ротор двигателя приходит во вращение, В.
3. Зависимости механической мощности на валу от частоты вращения
Р2=f(n);
Р2=m×n;
р2=Р2/РПУСК.О
За единицу мощности принимают мощность РПУСК.О, потребляемую электродвигателем. Р2=m×n при пуске равна нулю при пуске, когда n=0 и холостом ходе, когда m=0 она достигает максимума при частотах приблизительно равных половине частоты вращения холостого хода (рис. 2.3.1.4)
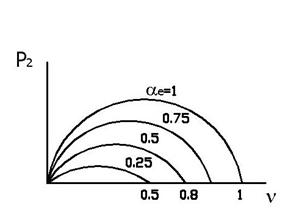
За номинальную механическую мощность обычно принимают максимальную механическую мощность Р2max. Частота вращения, соответствующая этой мощности, считается номинальной.
Рисунок 2.3.1.4
2.3.2. Асинхронный исполнительный двигатель с полым ферромагнитным ротором
Конструкция – статор не отличается от статора обычного асинхронного двигателя, имеет распределенную однослойную обмотку. Две обмотки ротора сдвинуты на 90 электрических градусов, пазы полузакрыты.
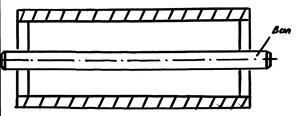 Ротор выполнен в виде полого ферромагнитного цилиндра, толщина стенки 0,5…3мм.
Ротор выполнен в виде полого ферромагнитного цилиндра, толщина стенки 0,5…3мм.
Рисунок 2.3.2.1
Магнитный поток замыкается по ротору, поэтому внутренний статор не нужен.
Воздушный зазор d = 0,2…0,3 мм. Но проводимость ротора из-за малой толщины не велика, сказывается также эффект вытеснения тока, следовательно cosj = 0,3…0,5.
Двигатель имеет большое активное сопротивление ротора SКР > 1. Самоход отсутствует.
Механические и регулировочные характеристики близки к линейным.
Следствие увеличения сопротивления приводит к уменьшению момента, мощности на валу, КПД также уменьшается. Устраняются эти недостатки, покрытием поверхности ротора – омеднение на 0,05…0,1мм. Тогда увеличиваются момент и мощность, но растут потери в роторе и обмотке статора.
Быстродействие мало ТМ = 1…3сек (электромеханическая постоянная времени).
Появляются силы одностороннего тяжения, ротор может залипнуть.
Пути замыкания магнитного потока в асинхронном исполнительном двигателе с полым ферромагнитным ротором:
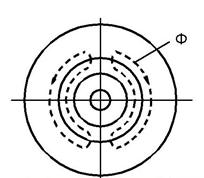 Омеднение ротора способствует уменьшению его активного сопротивления, следовательно, увеличению момента и мощности на валу и увеличению КПД.
Омеднение ротора способствует уменьшению его активного сопротивления, следовательно, увеличению момента и мощности на валу и увеличению КПД.
Недостаток: ротор испытывает радиальные силы тяжения к статору, т.к. воздушный зазор неравномерный, следовательно, увеличивается момент трения в подшипниках, уменьшается срок их службы и может привести к залипанию ротора показаны на рисунке 2.3.2.2
Рисунок 2.3.2.2.
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 4439; Нарушение авторских прав?; Мы поможем в написании вашей работы!