КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синхронные реактивные двигатели
Синхронные двигатели
Реактивный двигатель не имеет обмотки возбуждения. Его основной магнитный поток создаётся за счёт намагничивающего тока обмотки статора. В таком ЭД действует только реактивный момент: 
где m1 - число фаз обмотки статора
U1 фазное напряжение, подведённое к обмотке статора, В
 - угловая синхронная скорость;
- угловая синхронная скорость;
q - угол между осью результирующего магнитного потока и осью полюсов ротора, град;
 - индуктивное сопротивление обмотки статора по продольной и поперечной осям.
- индуктивное сопротивление обмотки статора по продольной и поперечной осям.
Реактивный момент не зависит от величины магнитного потока возбуждения, поэтому он имеет место даже при отсутствии возбуждения синхронной машины.
Появление реактивного момента обусловлено разностью магнитных сопротивлений по продольной и поперечной осям. Если  реактивного момента не возникает. Магнитное поле статора за счёт притяжения явновыраженных полюсов ротора создаёт силы --, стремящиеся повернуть ротор в положение при котором магнитный поток статора имеет на своём пути минимальное сопротивление.
реактивного момента не возникает. Магнитное поле статора за счёт притяжения явновыраженных полюсов ротора создаёт силы --, стремящиеся повернуть ротор в положение при котором магнитный поток статора имеет на своём пути минимальное сопротивление.
Магнитное поле статора вращается, ротор вращается синхронно с полем, но отстаёт от поля на пространственный угол q. За счёт угла q появляется тангенциальная составляющая электромагнитной силы.
Сумма всех потенциальных составляющих создаёт реактивный момент.
Реактивный момент и приводит ротор электрического двигателя во вращение с синхронной частотой вращения n1.
Неравенство индуктивных сопротивлений обмотки статора по продольной и поперечной осям  имеет место лишь при явно полюсном роторе. Следовательно, ротор реактивного двигателя обязательно должен быть явно полюсным.
имеет место лишь при явно полюсном роторе. Следовательно, ротор реактивного двигателя обязательно должен быть явно полюсным.
Конструктивно реактивный двигатель отличается от асинхронного лишь ротором.
а) б)
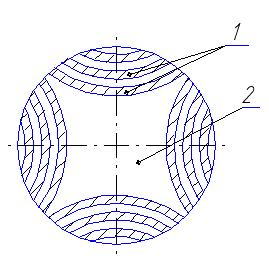
Рисунок 3.1.1 – типы роторов реактивных двигателей
Наиболее часто применяется реактивный двигатель с ротором, устройство которое показано на рисунке а. Он отличается от обычного ротора АД лишь наличием впадин- вырезов, которые образуют явно выраженные полюсы. Ротор имеет к.з. обмотку, выполненную по типу “беличьей клетки” и необходимую для создания пускового момента. Двигатель пускается как асинхронный.
Конструкции роторов могут быть различны. Например, в реактивных двигателях, предназначенных для работы в схемах синхронной связи, ротор изготавливают из алюминия, в который при отливке закладывают полосы из стали 1(рис.б)
В системах автоматики часто применяют однофазные реактивные двигатели. Обмотку статора этих двигателей выполняют, как и у асинхронных конденсаторных электродвигателей и включают по аналогичным схемам.
Угловая характеристика реактивного двигателя имеет вид:
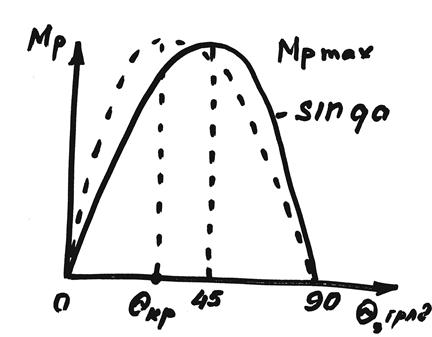 Из выражения для реактивного момента следует, что максимальное значение Mpmax наступает при нагрузке qкр= 45° (кривая). Но в этом случае не учитывается влияние активного сопротивления обмотки статора на зависимостьМ=f(q). Под влиянием активного сопротивления максимальное значение наступает при qкр< 45°
Из выражения для реактивного момента следует, что максимальное значение Mpmax наступает при нагрузке qкр= 45° (кривая). Но в этом случае не учитывается влияние активного сопротивления обмотки статора на зависимостьМ=f(q). Под влиянием активного сопротивления максимальное значение наступает при qкр< 45°
(qкр=30…40°) отсюда
увеличивается
рисунок 3.1.2 крутизна кривой в началь-
ной части (кривая---), а значит повышает величину удельного синхронизирующего момента Муд.
Удельный синхронизирующий момент – момент приходящийся на 1 градус угла q; и определяющий устойчивость работы СРД.
и определяющий устойчивость работы СРД.
Максимальны момент реактивного двигателя называют моментом выхода из синхронизма, так как если нагрузка на валу достигнет значение, при котором q>qкр ротор либо остановиться, либо продолжит вращаться асинхронно под действием электромагнитного момента, создаваемого потоками пусковой короткозамкнутой обмотки.
Величина реактивного момента МрºU21 отсюда реактивные двигатели очень чувствительны к колебаниям напряжения сети.
С углублением впадин на роторе возрастает разность магнитных сопротивлений по поперечной и продольной осям и реактивный момент увеличивается, отсюда увеличивается и момент выхода из синхронизма.Но с углублением впадин на роторе возрастает средняя величина воздушного зазора. Это ведёт к уменьшению пускового момента и момента выхода в синхронизм – наибольшего момента сопротивления, при котором ротор электрического двигателя ещё втачивается в синхронизм. Для втягивания в синхронизм необходима частота вращения ротора не менее 0,95n1, то есть S£0,05.
На рисунке 3.1.3 показаны зависимости М=f(S) при различных активных сопротивлениях ротора.
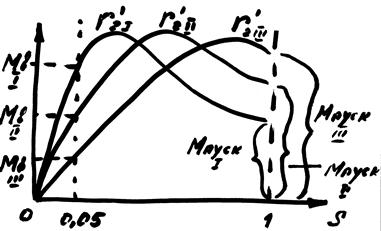
Рисунок 3.1.3
Чем более активное сопротивление пусковой клетки, тем меньше момент входа в синхронизм.
Наилучшее соотношение между Mpmax, Mbx и Мпуск получается при: 
Достоинства скорости реактивного двигателя:
1 Простота конструкции
2 Надёжность
3 Невысокая стоимость
Недостатки:
1 Плохие энергетические показатели- h=20…40%, так как повышенное сопротивление магнитной цепи машины (d - велик), низкий cos j, так как величина намагничивающего тока в токе статора весьма значительная.
2 Большие габариты и вес.
|
|
Дата добавления: 2014-01-13; Просмотров: 1638; Нарушение авторских прав?; Мы поможем в написании вашей работы!