КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Шаговые двигатели
|
|
|
|
Шаговые двигатели - это электромеханические устройства, которые преобразуют электрические импульсы напряжения управления в дискретные (скачкообразные) угловые или линейные перемещения ротора с возможной его фиксацией в нужных положения. Наиболее распространенная функциональная схема управления шагового двигателя представлена на рисунке 7.1
 Рисунок 7.1
Рисунок 7.1
Схема содержит блок управления, преобразующий входной сигнал  в многофазную систему напряжений, питающих обмотки ШД. Обычно БУ состоит из формирователя импульсов ФИ, распределителя импульсов РИ (электронного коммутатора) и усилителя мощности УМ.
в многофазную систему напряжений, питающих обмотки ШД. Обычно БУ состоит из формирователя импульсов ФИ, распределителя импульсов РИ (электронного коммутатора) и усилителя мощности УМ.
ФИ преобразует входные импульсы произвольной формы в прямоугольные импульсы требуемой длительности. РИ преобразует импульсы в многофазную систему напряжений (токов), которая через УМ подается на фазы ШД. Электрическая энергия поступает в БУ от источника постоянного напряжения  или тока.
или тока.
Принцип действия ШД основан на дискретном (скачкообразном) изменении магнитного поля в рабочем зазоре за счет поочередного импульсного питания фаз статора. Под воздействием каждого импульса ротора ШД совершает определенные угловые перемещения, называемые шагом.
Электрический шаг:

 - число устойчивых электрических состояний на периоде изменения магнитного поля.
- число устойчивых электрических состояний на периоде изменения магнитного поля.
 |
7.1 Устройство и принцип действия.
Рисунок 7.1.1
Применяемые в настоящее время шаговые двигатели в подавляющем большинстве являются многофазными и многополюсными синхронными электрическими машинами. В отличие от обычных синхронных двигателей их роторы не имеют короткозамкнутой пусковой обмотки, что объясняется частотным (а не асинхронным) пуском шаговых двигателей. Роторы двигателей могут быть возбужденными – активными – или невозбужденными - пассивными. На рисунке 7.1 изображена схема m –фазного шагового двигателя.
Для упрощения анализа физических процессов рассмотрим работу этого двигателя с простейшим невозбужденным ротором, имеющим дваполюса.
|
|
|
Питание обмоток статора может быть либо однополярным, либо двухполярным. При однополярном питании напряжение изменяется от нуля до +U; при двухполярном - от +U и до -U.
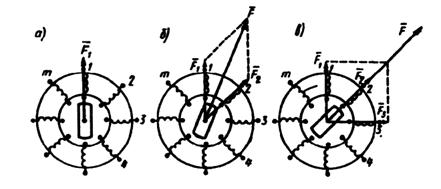
Современные электронные коммутаторы могут обеспечивать питание обмоток статора либо порознь, либо группами в различных сочетаниях. Каждому состоянию - такту коммутации, число которых зависит от способов включения обмоток, соответствуют вполне определенные величина и направление вектора результирующей МДС двигателя, а, следовательно, и вполне определенное положение ротора в пространстве. Так, если обмотки двигателя (рисунок 7.1.1) питать поочередно (1 – 2 - 3 -... - m) однополярными импульсами, то ротор двигателя будет иметь т устойчивых положений, которые совпадают с осями обмоток (рис. а). На практике с целью увеличения результирующей МДС статора а, следовательно, и магнитного потока и синхронизирующего момента обычно одновременно питается две, три и большее количество обмоток. При этом ротор двигателя при холостом ходе занимает положения, в которых ось ротора совпадает с результирующим вектором МДС.
В том случае, когда питается четное число обмоток, положение результирующего вектора МДС и ненагруженного ротора совпадает с линией, проходящей между двумя средними обмотками. В том случае, когда питается нечетное число обмоток, устойчивые положения ротора совпадают с осью средней обмотки. Таким образом, в обоих случаях (при четном и нечетном числе питаемых обмоток) ротор двигателя будет иметь m устойчивых положений. Однако соседние положения в этих случаях будут смещены на угол  .
.
|
|
|
Если поочередно включать то четное, то нечетное число обмоток, например 12—2—23—3...—m1, то число устойчивых положений ротора увеличится вдвое: n=2m.
На практике управление двигателя, при котором обмотки включаются поочередно равными группами по два, по три и т. д., называют симметричным. Поочередное включение неравных групп обмоток называют несимметричным управлением.
Кроме однополярного и двухполярного, симметричного и несимметричного способов управления шаговыми двигателями различают еще потенциальный и импульсный способы управления.
При потенциальном управлении напряжения на обмотках изменяются только в момент поступления управляющего сигнала - команды. При отсутствии последующего сигнала управления одна обмотка или группа обмоток, возбужденные предшествующим
сигналом, остаются под напряжением, и ротор занимает вполне определенное фиксированное положение.
При импульсном управлении любая обмотка (или группа обмоток), возбужденная сигналом — импульсом управления, по истечении некоторого времени, определяемого длительностью импульса, автоматически обесточивается. Фиксация положения ротора в период паузы между импульсами обеспечивается либо внутренним реактивным моментом (при наличии активного ротора), либо специальными магнитными, электромагнитными или механическими фиксирующими устройствами.
Выше была рассмотрена схема шагового двигателя с числом полюсов 2р = 2. На практике широко используются многополюсные шаговые двигатели. При 2р>2 ротор не нагруженного моментом сопротивления шагового двигателя при одном и том же питании обмоток может находиться в одном из р устойчивых положений. Таким образом, в m-фазном двигателе может быть либо pm устойчивых положений (при симметричном управлении), либо 2pm положений (при несимметричном управлении).
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 384; Нарушение авторских прав?; Мы поможем в написании вашей работы!