КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аналоговые электромеханические измерительные
|
|
|
|
Часть воросов отражены в книге в архиве книга.rar
приборы и преобразователи.
В аналоговых электромеханических приборах прямого измерения электромагнитная энергия, подведенная к прибору непосредственно из измеряемой цепи, преобразуемая в механическую энергию углового перемещения подвижной части прибора относительно неподвижной. Электромеханические измерительные приборы (ЭИП) применяют для измерения тока, напряжения, мощности, сопротивлений и других электрических величин на постоянном и переменном токах преимущественно промышленной частоты 50 Гц. Эти приборы относят к приборам прямого действия. Они состоят из электрического преобразователя, электромеханического преобразователя, отсчетного устройства (рис. 15).

Измерительная цепь. Она обеспечивает преобразование электрической измеряемой величины Х в некоторую промежуточную электрическую величину Y (ток или напряжение), функционально связанную с измеряемой величиной Х. Величина Y непосредственно воздействует на измерительный механизм (ИМ). По характеру преобразования измерительная цепь может представлять собой совокупность элементов.
Различные измерительные цепи позволяют использовать один и тот же ИМ при измерениях разных величин: напряжения, тока, сопротивления, меняющихся в широких пределах.
Измерительный механизм является основной частью конструкции прибора и преобразует электромагнитную энергию в механическую энергию, необходимую для отклонения его подвижной части на угол α относительно неподвижной. По способу создания вращающего момента ИМ подразделяются на типы:
1. магнитоэлектрический
2. электромагнитный
3. электродинамический
|
|
|
4. электростатический
5. индукционный
Подвижная часть ИМ представляет собой механическую систему с одной степенью свободы относительно оси вращения. Момент количества движения равен сумме моментов, действующих на подвижную часть в соответствии с дифференциальным уравнением
 ,
,
где  – момент инерции массы подвижной части, α – угол отклонения подвижной части;
– момент инерции массы подвижной части, α – угол отклонения подвижной части;
 – угловое ускорение, а
– угловое ускорение, а  - момент сил инерции.
- момент сил инерции.
На подвижную часть ИМ при её движении воздействует:
Вращающий момент Мвр, определяемый для всех ЭИП скоростью изменения энергии электромагнитного поля Wэм, сосредоточенной в механизме по углу отклонения α подвижной части.
 , (56)
, (56)
где n=1; 2.
Вращающий момент является некоторой функцией измеряемой величины Х, а следовательно, Y (тока, напряжения, произведения токов и т. д.) и α. Чтобы подвижная часть не доходила всякий раз до упора при любом значении измерительной величины Х, а поворачивалась на угол, однозначно зависящий от измеряемой величины, на подвижную часть должен действовать момент, направленный навстречу вращающему и зависящий от угла поворота подвижной части, этот момент - противодействующий момент Мпр, создаваемый механическим путем с помощью спиральных пружин, растяжек, подводящих проводов и пропорциональный углу отклонения α подвижной части:
Мпр=-Wα, (57)
Где W- удельный противодействующий момент на единицу угла закручивания пружины (зависит от материала пружины и его геометрических размеров).
Момент успокоения Мусп, т. е. момент сил сопротивления движению, всегда направленный навстречу движению и пропорциональный угловой скорости отклонения:
 , (58)
, (58)
где Р - коэффициент успокоения (демпфирования). Подставив (56), (57), (58) в (55) получим дифференциальное уравнение отклонения подвижной части механизма:
 (59)
(59)
Установившееся отклонение подвижной части ИМ определяется равенством вращающего и противодействующего моментов, т. е. Мвр= Мпр, в том случае, если два первых члена левой части дифференциального уравнения (59) равны нулю. Это равенство позволяет вывести уравнение шкалы, показывающее зависимость угла отклонения α подвижной части от значения измеряемой величины Х и параметров ИМ.
|
|
|
Быстрота успокоения подвижной части зависит от частотных свойств подвижной части ИМ.
Частотную характеристику системы можно получить на основе передаточной функции.
Представим (59) в операторной форме
(60)
На основании этого вспомогательного уравнения можно записать передаточную функцию ИМ в операторной форме
 (61)
(61)
Заменой оператора  получаем комплексный коэффициент передачи ИМ
получаем комплексный коэффициент передачи ИМ
 (62)
(62)
Модуль комплексного коэффициента передачи имеет вид 
Если ввести обозначения:  - собственная резонансная частота ИМ,
- собственная резонансная частота ИМ,  - степень успокоения,
- степень успокоения,  - приведенная или относительная частота изменения измеряемой величины Х, то формула (63) принимает вид
- приведенная или относительная частота изменения измеряемой величины Х, то формула (63) принимает вид  (64)
(64)
График зависимости (64) дан на рис.16
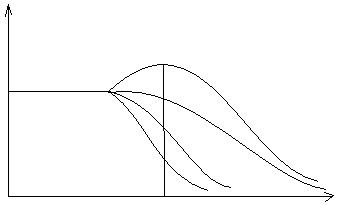







Если q=0, то K=1/W
q=1, то K=1/(2βW)
q=2, β=1, то k=1/(5W)
Здесь показали режимы β<1-колебательный
β=1-критический
β>1-апериодический
Период собственных колебаний ИМ примерно 1 секунда  . Следовательно отклонение подвижной части ИМ при частотах более 10Гц
. Следовательно отклонение подвижной части ИМ при частотах более 10Гц  практически равна нулю. Поэтому приборы с такими ИМ применяют в цепях постоянного тока. Рабочий диапазон частот ∆q прибора, где K(q)=const, при f<1Гц.
практически равна нулю. Поэтому приборы с такими ИМ применяют в цепях постоянного тока. Рабочий диапазон частот ∆q прибора, где K(q)=const, при f<1Гц.
4.1. Магнитоэлектрические измерительные приборы
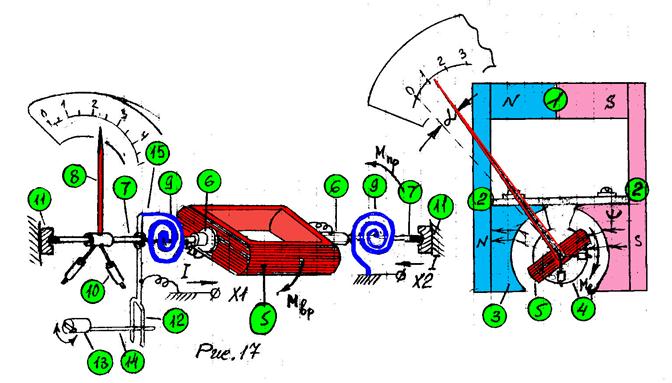
Работа магнитоэлектрических ИМ основана на принципе взаимодействия катушки с током и магнитного потока постоянного магнита. Наиболее распространены ИМ с подвижной рамкой (катушкой 5) и внешним магнитом 1 (рис.18). ИМ состоит из внешнего магнита 1, магнитопровода 2, цилиндрического сердечника из магнитомягкого железа 4, полюсных наконечников 3. В воздушном зазоре между полюсными наконечниками магнита и цилиндрическим сердечником создается практически равномерное радиальное магнитное поле.
В воздушном зазоре помещается рамка 5 из тонкого изолированного медного провода, намотанного на легкий бумажный или алюминиевый каркас прямоугольной формы.
К рамке с двух сторон приклеивают алюминиевые буксы 6, в которых закрепляют полуоси 7 или растяжки. Рамка может поворачиваться вместе с осью и стрелкой 8. Измеряемый ток I пропускают в обмотку рамки через две спиральные пружины 9, создающие противодействующий момент. Для уравновешивания подвижной части служат противовесы – грузики 10. Алюминиевая стрелка и шкала образуют отсчетное устройство.
|
|
|
Полуоси представляют собой легкую алюминиевую трубку, в которую запрессовывают керны (стальные отрезки). Концы кернов затачивают и на конус с полусферическим закруглением. Опираются керны на агатовые подпятники 11.
Одним концом пружину противодействующего момента 9 крепят к полуоси, а другим к поводку 12 корректора. Корректор, устанавливающий на ноль стрелку 8 не включенного прибора, состоит из винта 13 с эксцентрично расположенным пальцем 14 и вилки с поводком 15. Винт корректора выводится на переднюю панель корпуса прибора, вращаясь, он двигает вилку 12, что вызывает закручивание пружины и соответственно перемещение стрелки 8. Ток в рамке создает вращающий момент
 (65)
(65)
где  -энергия магнитного поля системы, состоящей из постоянного магнита и рамки с током;
-энергия магнитного поля системы, состоящей из постоянного магнита и рамки с током;
 - поток постоянного магнита, сцепленный с обмоткой рамки, по которой протекает ток I;
- поток постоянного магнита, сцепленный с обмоткой рамки, по которой протекает ток I;
В - магнитная индукция в воздушном зазоре;
S – площадь рамки или среднего витка рамки;
n – число витков обмотки рамки.
Вращающий момент ИМ с радиальным равномерным магнитным полем в воздушном зазоре не зависит от угла отклонения α подвижной части. Под действием момента  подвижная часть поворачивается вокруг оси, тем самым закручивая спиральные пружины, создающие противодействующий момент. При отклонении рамки на некоторый угол α вращающий и противодействующий моменты станут равными по значению и дальнейшее отклонение рамки прекратится. Из условия равенства моментов =
подвижная часть поворачивается вокруг оси, тем самым закручивая спиральные пружины, создающие противодействующий момент. При отклонении рамки на некоторый угол α вращающий и противодействующий моменты станут равными по значению и дальнейшее отклонение рамки прекратится. Из условия равенства моментов =  и из (65),(57) следует
и из (65),(57) следует
 (66)
(66)
Откуда угол отклонения подвижной части механизма
 (67)
(67)
где  - чувствительность измерительного механизма по току.
- чувствительность измерительного механизма по току.
Из (67) следует, что отклонение α подвижной части ИМ линейно растет с увеличением тока I, т. е. шкала прибора равномерная.
|
|
|
Повышение чувствительности ИМ может быть достигнуто за счет увеличения индукции В в зазоре, числа витков n рамки или уменьшения удельного противодействующего момента W пружин.
При изменении направления тока I изменяется направление отклонения подвижной части ИМ;
при включении ИМ в цепь переменного тока из-за инерционности его подвижной части среднее значение вращающего момента за период переменного тока будет равен нулю.
В магнитоэлектрических ИМ успокоение подвижной части магнитоиндукционного принципа: при отклонении подвижной части в поле постоянного магнита в алюминиевом каркасе рамки, а также в витках обмотки рамки, замкнутой на некоторое внешнее сопротивление, индуцируются токи, создающее совместно с полем постоянного магнита тормозящий момент, быстро успокаивающий подвижную часть (время упокоения не более 4 секунд).
Достоинства МЭ ИМ:
1) высокая чувствительность, удается создать приборы с отклонением на всю шкалу при токе 0,01мкА(10нА);
2) большая точность;
3) высокий класс точности прибора 0,2, 0,1 и даже 0,05;
4) очень малое потребление тока от внешней цепи (можно снизить потребляемую мощность до  , т. е. до 1нВт);
, т. е. до 1нВт);
5) высокая устойчивость на воздействие внешних магнитных полей (т. к. высока индукция в зазоре собственного магнита).
Недостатки:
1) сложность изготовления;
2) плохая перегрузочная способность, обусловленная лёгким перегревом противодействующих пружин и изменение их упругих свойств (отсюда изменение градуировки шкалы);
3) температурные влияния на точность измерения.
Применение магнитоэлектрических ИМ:
1) в многопредельных и широкодиапазонных амперметрах, вольтметрах для непосредственного измерения в цепях постоянного тока;
2) в гальванометрах – высокочувствительных измерительных приборах с неградуированной шкалой для измерения малых токов  , напряжений менее
, напряжений менее  , зарядов и для обнаружения тока и напряжения (индикаторы нуля) в мостовых и компенсационных цепях;
, зарядов и для обнаружения тока и напряжения (индикаторы нуля) в мостовых и компенсационных цепях;
3) в аналоговых омметрах, термоэлектрических амперметрах и в комбинированных вольтметрах с выпрямительными преобразователями при измерениях переменного тока и напряжения.
4.2. Электромагнитные измерительные приборы.
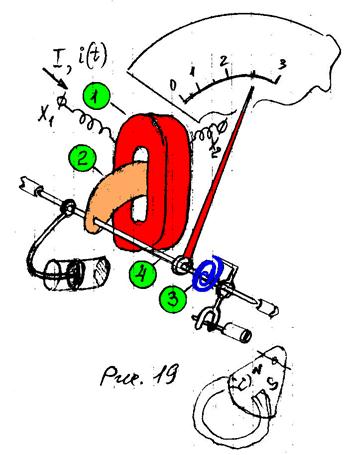
В электромагнитных ИМ для создания вращающего момента используют действие магнитного поля катушки 1 с током на подвижный лепесток 2, эксцентрично насаженный на оси 4 прибора.
Противодействующий момент создается спиральной пружиной 3. При прохождении по неподвижной плоской катушке измеряемого тока I возникает магнитное поле, которое, воздействуя на лепесток 2, стремится расположить его так, чтобы энергия магнитного поля была наибольшей (чтобы индуктивность катушки была наибольшей), т. е. втянуть лепесток внутрь катушки. Подвижная часть ИМ поворачивается до тех пор, пока вращающий момент не станет равным противодействующему моменту: = .
Энергия магнитного поля катушки с током
 , (68)
, (68)
где L – индуктивность катушки.
При повороте подвижной части механизма сердечник (лепесток) перемещается относительно катушки, что вызывает изменение индуктивности L, поэтому вращающий момент
 , (69)
, (69)
Угол отклонения до положения равновесия = определяется из (69) и (57)
 , (70)
, (70)
где - чувствительность измерительного механизма по току.
Это уравнение шкалы по постоянному току.
Шкала прибора квадратичная, поэтому она в начала сжата, а в конце растянута. Поскольку α является функцией  , знак угла поворота не зависит от направления тока в катушке, поэтому электромагнитные приборы одинаково пригодны для измерения в целях постоянного или переменного тока.
, знак угла поворота не зависит от направления тока в катушке, поэтому электромагнитные приборы одинаково пригодны для измерения в целях постоянного или переменного тока.
Если по катушке пропустить переменный ток i(t), то мгновенное значение вращающего момента
 , (71)
, (71)
Прибор реагирует на среднее значение вращающего момента за период переменного тока
 (72)
(72)
т. к.  - эффективное значение (среднеквадратичное) тока; Т – период переменного тока.
- эффективное значение (среднеквадратичное) тока; Т – период переменного тока.
Из (72) следует, что отклонение подвижной части ИМ пропорционально среднеквадратичному (эффективному, действующему) значению измеряемого переменного тока. Успокоение в приборе воздушное или магнитоиндукционное.
Достоинства:
1) простота и надежность конструкции, низкая стоимость;
2) хорошая перегрузочная способность (катушка способна выдержать кратковременно довольно большие токи);
3) одинаковая пригодность для измерения в цепях постоянного и переменного токов;
Недостатки:
1) большое собственное потребление энергии из измеряемой цепи;
2) невысокая точность, квадратичная шкала;
3) малая чувствительность;
4) заметное влияние внешних магнитных полей из-за слабого собственного магнитного поля;
5) частотная зависимость погрешности измерения – L(f);
Применение: Применяются в качестве амперметров и вольтметров преимущественно в целях переменного тока промышленной частоты (50Гц) в качестве приборов классов точности 1,0 и 1,5.
4.3. Электростатические измерительные приборы.
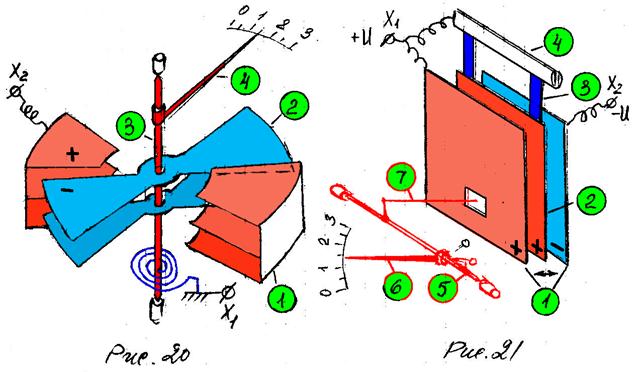
Принцип работы электростатических измерительных приборов основан на взаимодействии электрически заряженных электродов, разделённых диэлектриком. Конструктивно ЭСТ ИМ представляют собой разновидность плоского конденсатора, т. к. в результате перемещения подвижной части изменяется ёмкость системы. Практическое применение нашли приборы с поверхностным механизмом (изменение ёмкости осуществляется за счет изменения активной площади электродов) и с линейным механизмом (изменение ёмкости осуществляется за счет изменения расстояния между электродами,  ), конструкции которых показаны на рис. 20 и 21. Первый вид приборов применяется в переносных вольтметрах, измеряющих напряжение до нескольких сотен вольт. Второй вид позволяет измерить напряжение в несколько киловольт. В приборе рис. 20 секторообразные пластины 2 образуют подвижную часть прибора. Она поворачивается на оси 3 вместе со стрелкой 4. Силы электростатического поля стремятся повернуть подвижную часть относительно неподвижной 1 так, чтобы энергия электрического поля была максимальной. Поскольку энергия (
), конструкции которых показаны на рис. 20 и 21. Первый вид приборов применяется в переносных вольтметрах, измеряющих напряжение до нескольких сотен вольт. Второй вид позволяет измерить напряжение в несколько киловольт. В приборе рис. 20 секторообразные пластины 2 образуют подвижную часть прибора. Она поворачивается на оси 3 вместе со стрелкой 4. Силы электростатического поля стремятся повернуть подвижную часть относительно неподвижной 1 так, чтобы энергия электрического поля была максимальной. Поскольку энергия ( ) будет максимальна при максимальном значении емкости, под воздействием приложенного напряжения U подвижный электрод будет втягиваться между неподвижными. В ЭСТ ИМ второго типа (рис. 21) электроды 1 закреплены неподвижно, подвижный электрод 2 прикреплен на упругих лентах 3 к держателю 4. Один из неподвижных электродов соединяется электрически с подвижным электродом и к ним подводится один потенциал (например, положительный). Отрицательный потенциал подается на неподвижный электрод. Подвижный электрод отталкивается от левого неподвижного электрода и притягивается к правому. Перемещение подвижного электрода с помощью тяги 7 передается на ось 5 со стрелкой 6.
) будет максимальна при максимальном значении емкости, под воздействием приложенного напряжения U подвижный электрод будет втягиваться между неподвижными. В ЭСТ ИМ второго типа (рис. 21) электроды 1 закреплены неподвижно, подвижный электрод 2 прикреплен на упругих лентах 3 к держателю 4. Один из неподвижных электродов соединяется электрически с подвижным электродом и к ним подводится один потенциал (например, положительный). Отрицательный потенциал подается на неподвижный электрод. Подвижный электрод отталкивается от левого неподвижного электрода и притягивается к правому. Перемещение подвижного электрода с помощью тяги 7 передается на ось 5 со стрелкой 6.
Вращающий момент
Величина отклонения, соответствующая условию равновесия  определяется соотношением
определяется соотношением
 (74)
(74)
где Su - чувствительность прибора по напряжению.
Из соотношения (74) видно, что отклонение пропорционально квадрату приложенного напряжения и следовательно шкала прибора неравномерна. Смена полярности напряжения не изменяет направление отклонения, поэтому приборы можно применять на переменном токе, но из-за инерции подвижная часть не может следовать за изменением вращающего момента и реагирует на его среднее значение
 (75)
(75)
где Uэф - эффективное (действующее значение) переменного напряжения.
Вращающий момент электростатического механизма мал, поэтому вольтметры данного типа рассчитаны на предел более 10В.
Достоинства прибора.
1) На показания ЭСТ ИМ практически не влияет температура, частота, форма приложенного напряжения, а также не влияют внешние магнитные поля.
2) Собственное потребление энергии очень мало, а на постоянном токе равно нулю.
3) Высокое входное сопротивление, малая входная емкость.
4) Возможность использования в цепях постоянного и переменного токов.
Недостатки ЭСТ ИМ.
1) Малая чувствительность на небольшие напряжения менее 10В.
2) Нелинейная шкала прибора.
3) Прибор подвержен влиянию внешних электрических полей, т. к. малое собственное электрическое поле между обкладками подвижной части механизма. Устраняют эту зависимость специальной электрической экранировкой от внешних электрических полей.
Промышленность выпускает ЭСТ вольтметры классов точности 0,5; 1,0; 1,5 на напряжения от 10В до 100кВ.
4.4. Электродинамические измерительные приборы.
В приборах ЭД системы имеются пара катушек – подвижная и неподвижная. Подвижная катушка 2 может
поворачиваться относительно неподвижной 1, состоящей из двух частей, разделенных зазором. Магнитное поле катушек замыкается по воздуху. Вращающий момент перемещает стрелку 4, закрепленную на оси 5, относительно шкалы 3. Успокоитель 6 – воздушного типа. Для увеличения вращающего момента.
Вращающий момент ИМ равен (56)
 ,
,
где Wм - энергия магнитного поля, α – угол отклонения подвижной части механизма.
Энергия системы индуктивно связанных катушек с токами  и
и  определяется соотношением
определяется соотношением
 , (76)
, (76)
где  – индуктивность катушек,
– индуктивность катушек,  – взаимоиндуктивность катушек. Если учесть что токи и , индуктивности постоянны, а коэффициент взаимоиндуктивности зависит от угла поворота α подвижной катушки, то
– взаимоиндуктивность катушек. Если учесть что токи и , индуктивности постоянны, а коэффициент взаимоиндуктивности зависит от угла поворота α подвижной катушки, то
 , (77)
, (77)
Если пропустить по катушкам переменные токи и , подвижная часть прибора будет реагировать только на среднее значение вращающего момента:
 , (78)
, (78)
При установившемся отклонении справедливо соотношение  и
и
 , (79)
, (79)
Соотношение (79) называется формулой шкалы в общем виде. Если точки  и
и  синусоидальны и фазовый сдвиг между ними равен
синусоидальны и фазовый сдвиг между ними равен  , то есть
, то есть
то формула шкалы (79) принимает вид:
 (80)
(80)

где  – чувствительность, ЭД НМ потоку
– чувствительность, ЭД НМ потоку  ,
,  – эффективное действующее значение токов
– эффективное действующее значение токов  и ,
и ,  – коэффициент фазы токов.
– коэффициент фазы токов.
Электродинамические НМ применяются в амперметрах, вольтметрах и ваттметрах постоянных и переменных токов.
Амперметры.
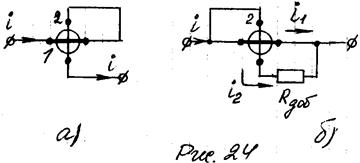
Для случая а) (рис. 24):
Для случая б) (рис. 24):
Существует две схемы соединения катушек ИМ: последовательное и параллельное (рис. 24 а, б).
При последовательном включении (при токах до 0,5А) подвижной катушки (рамки) 1 с неподвижными катушками 2 (рис. 24,а) токи  , φ=0, тогда (80) принимает вид
, φ=0, тогда (80) принимает вид
 (81)
(81)
Таким образом отклонение стрелки прибора пропорционально квадрату эффективного значения измеряемого переменного и постоянного тока, следовательно, шкала квадратична, т.е. нелинейна. При параллельном включении основную часть измеряемого тока  (величина от 0,5 до 10А) пропускают по неподвижной катушке, которая наматывается толстым проводом.
(величина от 0,5 до 10А) пропускают по неподвижной катушке, которая наматывается толстым проводом.
При этом уменьшается ток через рамку.
Перераспределение токов достигают путём включения добавочного сопротивления  в цепь подвижной катушки (рамки) см. рис. 24,б. Если ввести коэффициент перераспределения токов
в цепь подвижной катушки (рамки) см. рис. 24,б. Если ввести коэффициент перераспределения токов
 и обозначив измеряемый ток
и обозначив измеряемый ток  из (80) имеем
из (80) имеем
 (82)
(82)
Если  , то
, то
Вольтметры. Если прибор используется для измерения напряжения, то используют последовательное включение обмоток и включают дополнительный резистор , который ограничивает ток через прибор (рис. 25).
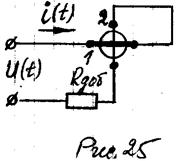
Показания прибора определяются уравнением шкалы (80). Если учесть, 
Согласно (80)
то φ=0, cosφ=1,
то  (83)
(83)
где  - чувствительность ЭД вольтметра.
- чувствительность ЭД вольтметра.
Ваттметр.
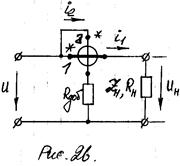 *-обозначение ”генераторных концов катушек”
*-обозначение ”генераторных концов катушек”
Независимое включение катушек ЭД механизма применяется в ваттметрах – приборах для измерения мощности. Схема включения катушек показана на рис. 26. Неподвижная катушка 1 с малым сопротивлением включается последовательно с нагрузкой  .
.
Подвижная катушка с последовательно включенным резистором подключается параллельно нагрузке. При таком соединении отклонение подвижной части прибора пропорциональна средней активной мощности, рассеиваемой на нагрузке  за период T, т.е.
за период T, т.е.
 (84)
(84)
Согласно (79) и рис.26
Если

то
Если 
где  - чувствительность ЭД ИМ по мощности.
- чувствительность ЭД ИМ по мощности.
Достоинства прибора ЭД системы:
1) Высокая точность, амперметры и вольтметры класса точности 0,1; 0,2; 0,5;
2) Возможность использования для измерения тока, напряжения и мощности в цепях постоянного и переменного тока в диапазоне частот от 50Гц до 5-10кГц.
Недостатки:
1) Малая чувствительность.
2) Подвержен влиянию внешних магнитных полей и требует магнитной экранировки.
3) Имеет малую перегрузочную способность, относительно сложны и дороги.
4) Обладают большим собственным потреблением мощности (при параллельном включении обмоток), так ваттметры потребляют до 5Вт мощности.
4.5. Индукционные измерительные приборы.
 Индукционные приборы состоят из индукционного измерительного механизма (ИМ) с отсчетным устройством и измерительной схемой. Принцип действия ИНД ИМ основан на взаимодействии магнитных потоков электромагнитов и вихревых токов, индуцированных магнитными потоками в подвижной части, выполненной в виде алюминиевого диска.
Индукционные приборы состоят из индукционного измерительного механизма (ИМ) с отсчетным устройством и измерительной схемой. Принцип действия ИНД ИМ основан на взаимодействии магнитных потоков электромагнитов и вихревых токов, индуцированных магнитными потоками в подвижной части, выполненной в виде алюминиевого диска.
В настоящее время из индукционных приборов находят применение счётчики электрической энергии в цепях переменного тока.
Счетчики электрической энергии.

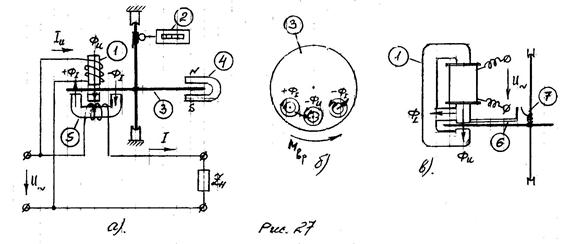
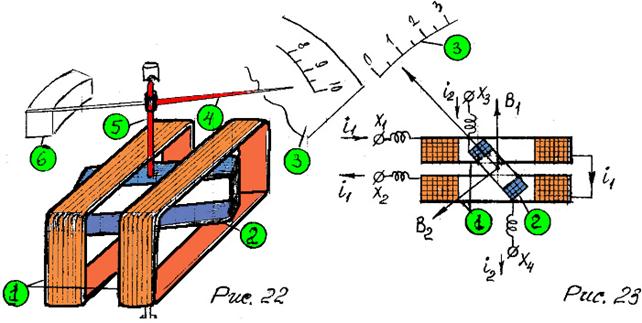
Устройство и схема включения индукционного счетчика показаны на рис. 27,а, где 1 – трехстержневой магнитопровод с обмоткой напряжения; 2 – счетный механизм; 3 – алюминиевый диск, укрепленный на оси; 4 – постоянный магнит для создания тормозного момента; 5 – П-образный магнитопровод с токовой обмоткой.
Магнитные потоки  (знаки потоков условные: направленные вверх-положительные, направленные вниз-отрицательные) возбуждают в алюминиевом диске токи Фуко (см. рис. 27,б). Эти токи взаимодействуют с соседними магнитными потоками по принципу
(знаки потоков условные: направленные вверх-положительные, направленные вниз-отрицательные) возбуждают в алюминиевом диске токи Фуко (см. рис. 27,б). Эти токи взаимодействуют с соседними магнитными потоками по принципу
”токи возбуждаемые разноименными (противоположными) магнитными потоками притягиваются, а одноименными - отталкиваются”. В результате такого взаимодействия в диске возникает вращающий момент, направления которого показано на рис. 27,б.
Анализ работы индукционного счетчика показывает, что вращающий момент пропорционален мощности переменного тока.
 , (86)
, (86)
где  -постоянный коэффициент;
-постоянный коэффициент;  - (угловая) частота вращения диска. Приравнивая вращающий и тормозной моменты, получаем
- (угловая) частота вращения диска. Приравнивая вращающий и тормозной моменты, получаем
 , (87)
, (87)
число оборотов диска N за время  измерения энергии определяется интегралом по времени от частоты вращения диска , т.е.
измерения энергии определяется интегралом по времени от частоты вращения диска , т.е.
 , (88)
, (88)
где  - постоянная счетчика;
- постоянная счетчика;  -энергия, прошедшая через счетчик за интервал времени .
-энергия, прошедшая через счетчик за интервал времени .
Отсчет энергии производится по показаниям счетного механизма – счетчика оборотов, градуированного в единицах энергии. Единице электрической энергии, регистрируемой счетным механизмом, соответствует определенное количество оборотов подвижной части счетчика. Это соотношение, называемое передаточным числом  , указывается на счетчике.
, указывается на счетчике.
Величину, обратную передаточному числу, т.е. отношение зарегистрированной энергии к числу оборотов диска, называют номинальной постоянной  . Значения A и зависят только от конструкции счетного механизма и для данного счетчика остаются постоянными.
. Значения A и зависят только от конструкции счетного механизма и для данного счетчика остаются постоянными.
Счетчики характеризуются порогом чувствительности, который не должен быть более 0,5% 
для счетчиков класса 1,0; 1,5; 2.
Вращение диска при отсутствии тока в нагрузке и при наличии напряжения в параллельной цепи счетчика называется самоходом и устраняется установкой на оси диска стальной проволоки 7
(рис. 27, в), а к магнитопроводу параллельного электромагнита – стальной пластинки 6(флажка).
При вращении подвижной части проволочка притягивается к флажку, намагниченному потоками рассеяния электромагнита, что создает дополнительный тормозной момент, устраняющий самоход.
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 1278; Нарушение авторских прав?; Мы поможем в написании вашей работы!