КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основні теоретичні відомості. Лабораторна робота №1. Дослідження двигуна внутрішнього згоряння як об’єкта регулювання частоти обертання вала
|
|
|
|
Лабораторна робота №1. ДОСЛІДЖЕННЯ ДВИГУНА ВНУТРІШНЬОГО ЗГОРЯННЯ ЯК ОБ’ЄКТА РЕГУЛЮВАННЯ ЧАСТОТИ ОБЕРТАННЯ ВАЛА
Мета роботи: вивчення практичних методів реалізації моделей об’єктів регулювання за допомогою пакета програм MATLAB.
1. Об’єкти регулювання. Одним з визначень об’єкта регулювання є таке: це пристрій або сукупність пристроїв, де протікає регульований технологічний процес і такий пристрій нуждається в спеціально організованих діях для досягнення поставленої мети керування.
Специфіка систем автоматичного регулювання визначається в основному властивостями і особливостями регульованого об’єкта.
При дослідженнях систем регулювання з метою визначення потрібних характеристик регулятора необхідно враховувати і властивості об’єкта регулювання.
В сучасній техніці часто виникає необхідність автоматичного керування об’єктами самої різної фізичної природи. До них можна віднести суднові енергетичні установки з двигунами внутрішнього згоряння, газовими і паровими турбінами; котлоагрегати, атомні реактори, антени радіолокаційних станцій, об’єкти воєнної техніки, космічні апарати і інші об’єкти.
Таким чином під регульованим об’єктом слід розуміти пристрій, технологічний процес, який закінчується виробленням відповідного виду енергії. Кількісні і якісні показники цієї енергії забезпечується за рахунок підтримання її визначаючих параметрів на заданому рівні, тобто за рахунок підтримання роботи установки на заданому режимі.
По виду динамічних характеристик більшість регульованих об’єктів можна розділити на дві групи: статичні і астатичні.
а) б)
Рис.1.1. Криві перехідного процесу статичного (а) і астатичного (б) регульованого об’єкта
|
|
|
Статичні об’єкти, які іще називають стійкими або такими, що мають самовирівнювання. В таких об’єктах регульована величина при подачі на вхід збурюючої або регулюючої дії змінюється на деяку величину і встановлюється нове значення регульованої величини без застосування автоматичного регулятора.
Астатичні об’єкти, нейтральні об’єкти або об’єкти без самовирівнювання. При подачі вхідної дії на виході астатичних об’єктів регульована величина постійно змінюється і з часом встановлюється постійна швидкість зміни регульованої величини.
Вид кривої перехідного процесу  при подачі на вхід стрибкоподібної зміни y(t) вхідної дії у малоінерційного (1), інерційного (2) та об’єкта з чистим запізнюванням (3) приведено на рис.1 а) і б) відповідно.
при подачі на вхід стрибкоподібної зміни y(t) вхідної дії у малоінерційного (1), інерційного (2) та об’єкта з чистим запізнюванням (3) приведено на рис.1 а) і б) відповідно.
Зустрічаються також і нестійкі регульовані об’єкти, в яких при тих же умовах регульована величина змінюється з зростаючою швидкістю.
2. Передаточні функції. Дослідження автоматичних систем спрощується при використанні прикладних математичних методів операційного числення. Це дає можливість перейти від диференційного рівняння до однозначно відповідного йому алгебраїчного рівняння. Такий перехід називають перетворенням по Лапласу.
Також в теорії САР використовують поняття передаточної функції та зображення по Лапласу. Розглянемо коротко загальні уявлення про перетворення по Лапласу.
Якщо є деяка функція незалежної дійсної перемінної, наприклад, часу t, то перетворення по Лапласу, що виконуються над функцією переводить її в функцію  , згідно співвідношенню:
, згідно співвідношенню:
 ,
,
де s - довільна комплексна величина, яку позначають  , де z та ω – матеріальні дійсні перемінні.
, де z та ω – матеріальні дійсні перемінні.
Таке перетворення скорочено позначають так:  і називають прямим перетворенням по Лапласу. Функція називається оригіналом, а - зображенням функції . Такий перехід виконується при нульових початкових умовах, тобто для
і називають прямим перетворенням по Лапласу. Функція називається оригіналом, а - зображенням функції . Такий перехід виконується при нульових початкових умовах, тобто для  і використовується, в технічних задачах після подачі вхідних дій, а це якраз і має практичний інтерес при рішенні задач автоматичного регулювання.
і використовується, в технічних задачах після подачі вхідних дій, а це якраз і має практичний інтерес при рішенні задач автоматичного регулювання.
|
|
|
В загальному випадку оригінал функції , знаходиться по зображенню шляхом зворотного перетворення Лапласа:
 .
.
Операція зворотного перетворення позначається символом  або
або  , тобто так:
, тобто так:
 .
.
Перетворення по Лапласу, що використовуються при розрахунках по автоматиці приведені в таблиці 1.1.
Таблиця 1.1.
 (оригінал)
(оригінал)
|  (зображення)
(зображення)
|

| 
|

| 
|

| 
|

| 
|

| 
|

| 
|
Передаточною функцією елемента (системи) називається відношення зображення по Лапласу вихідної координати до зображення по Лапласу вхідної координати. Якщо позначити передаточну функцію через  , то можна записати:
, то можна записати:
 .
.
3. Двигун внутрішнього згоряння як об’єкт регулювання частоти обертання вала. Функціональну схему ДВЗ як об’єкта регулювання частоти обертання вала наведено на рис. 1.2.
Рис.1.2. Функціональна схема ДВЗ як об’єкта регулювання частоти обертання вала
Рівняння ДВЗ як об'єкта регулювання частоти обертання вала має вигляд:
 (1.1)
(1.1)
де То - постійна часу об'єкта регулювання (ДВЗ):
 - коефіцієнти передачі ДВЗ по впливу, що керує та впливу, що збурює;
- коефіцієнти передачі ДВЗ по впливу, що керує та впливу, що збурює;
 - відносні відхилення від базових значень частоти обертання, ходу рейки паливного насосу, потужності споживача.
- відносні відхилення від базових значень частоти обертання, ходу рейки паливного насосу, потужності споживача.
Одержимо передаточні функції для рівняння (1.1) по кожному з впливів окремо.
Згідно таблиці 1.1 можна записати:
 ,
,
 .
.
Виділимо вихідну величину  та винесемо її за дужки:
та винесемо її за дужки:
 ,
,
 .
.
Звідки отримаємо передаточні функції ДВЗ по впливу, що керує  та впливу, що збурює
та впливу, що збурює  :
:
 .
.
Схему набору моделі ДВЗ як об’єкта регулювання частоти обертання вала у Simulink наведено на рис. 1.3.
Чисельні значення коефіцієнтів наведено у таблиці 1.2.
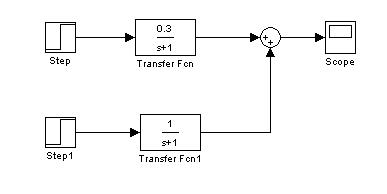
Рис.1.3 Схема набору моделі ДВЗ як об’єкта регулювання частоти обертання вала у Simulink
|
|
|
|
|
Дата добавления: 2014-11-06; Просмотров: 549; Нарушение авторских прав?; Мы поможем в написании вашей работы!