КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пропорционально-дифференциальный (ПД-регулятор)
|
|
|
|
П-, И-, и ПИ-регуляторы не могут упреждать ожидаемые отклонения регулируемой величины, реагируя только на имеющиеся в данный момент времени нарушения технологического процесса.Если регулируемая величина начинает быстро отклоняться от заданного значения,то это значит, что на объект поступили значительные возмущения и отклонение будет значительным.В этом случае желательно иметь регулятор,который вырабатывал бы регулирующее воздействие, пропорционально скорости изменения регулируемой величины,упреждая её отклонения.
В САР используется ПД-регуляторы, оказывающие воздействия на регулирующий орган пропорционально отклонению регулируемой величины и скорости изменения этого отклонения.
U(t)=  *
*  +
+  *
*  .
.
Постоянная называется постоянной времени дифференцирования и определяет величину регулирующего воздействия по производной от отклонения.
Рассмотрим переходную характеристику ПД- регулятора(рисунок 11.8).
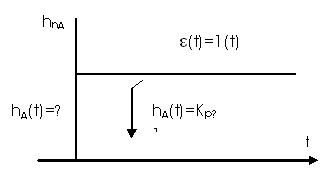
Рисунок 11.8 Переходная характеристика ПД-регулятора
При подаче на вход регулятора сигнала =1(t) на выходе появится бесконечно большой сигнал от действия дифференциальной составляющей  =
= и сигнал от пропорциональной составляющей
и сигнал от пропорциональной составляющей  =*1(t).Сигнал сразу же падает до нуля, а сигнал
=*1(t).Сигнал сразу же падает до нуля, а сигнал  остаётся постоянным и равным первоначальному.
остаётся постоянным и равным первоначальному.
Введение в закон регулирования производной по отклонению существенно повышает эффективность работы регулятора.
При поступлении на объект возмущающего воздействия отклонение регулируемой величины от заданного значения в связи с инерционностью объекта нарастает постепенно и дифференцирование этого отклонения даёт конечное значение как по абсолютной величине, так и по длительности.
Пример. Пусть отклонение регулируемой величины изменяется по закону:
|
|
|
=a*t, тогда
U(t)= ∙ а∙t+ ∙ a;
В начальный момент времени срабатывает Д-составляющая, а за тем воздействие на объект увеличивается по нарастающей за счёт П-составляющей.
Передаточная функция: W(p)= +∙p.
КЧХ: W(jw)= +∙j∙w=U(w)+j∙V(w).
АЧХ: A(w)= 
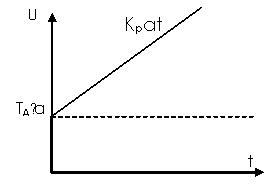
Рисунок 11.9 Переходная характеристика ПД-регулятора
ФЧХ: 
ЛЧХ: L(w)=20Lg
1. При  <
< w</
w</
L1(w)=20Lg (0 дб/дек)
2. При w>/
L2(w)=20Lgw=20Lg+20Lgw (+20 дб/дек).
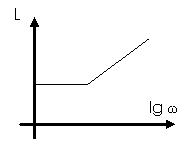
Рисунок 11.10 ЛАХ ПД- регулятора
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 1769; Нарушение авторских прав?; Мы поможем в написании вашей работы!