КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вектор прискорення точки
|
|
|
|
План
План
1.Момент сили відносно осі. Обчислення головного вектора і головного моменту просторової системи сил.
2.Зведення просторової системи сил до найпростішого вигляду.
3.Рівновага довільної просторової системи сил. Випадок паралельних сил.
4.Розв’язання задач.
1.Момент сили відносно осі. Обчислення головного вектора і головного моменту просторової системи сил
На попередніх лекціях ми ввели поняття моменту сили відносно центра і сказали, що вектор  напрямлений перпендикулярно площині ОАВ (рис.1). Як це було і для сили, надалі нам необхідно буде розглядати проекції вектора на різні координатні осі.
напрямлений перпендикулярно площині ОАВ (рис.1). Як це було і для сили, надалі нам необхідно буде розглядати проекції вектора на різні координатні осі.
Проекція вектора , тобто моменту сили  відносно центра О, на яку-небудь вісь z, що проходить через цей центр, називається моментом сили відносно осі z, тобто
відносно центра О, на яку-небудь вісь z, що проходить через цей центр, називається моментом сили відносно осі z, тобто
 або
або  ,
,
де  – момент сили відносно осі z,
– момент сили відносно осі z,
γ – кут між вектором і віссю z.
Із означення виходить, що , як проекція вектора на вісь, величина алгебраїчна. Знак визначається так само, як і знак проекції будь-якого вектора, у нашому випадку > 0.
Знайдемо ще один вираз для визначення цієї величини. Для цього через довільну точку О1 осі z (див. рис.1) проведемо площину (xy ), перпендикулярну цій осі, й спроектуємо ∆ОАВ на цю площину. Оскільки вектор перпендикулярний площині ОАВ, а вісь z перпендикулярна Δ О1А1В1, то кут γ, як кут між нормалями до цих площин, буде кутом між цими площинами. Тоді:
 або
або  .
.
Отже, момент сили відносно осі z дорівнює алгебраїчному моменту проекції цієї сили на площину, перпендикулярну осі z, взятому відносно точки О1 перетину осі з цією площиною.
Це є друге означення моменту сили відносно осі.
Момент сили відносно осі буде мати знак плюс, коли з додатного кінця осі поворот, що прагне здійснити сила  , бачиться проти ходу годинникової стрілки, а знак мінус – за ходом годинникової стрілки.
, бачиться проти ходу годинникової стрілки, а знак мінус – за ходом годинникової стрілки.
|
|
|
 Послідовність обчислення моменту сили відносно осі (рис.2):
Послідовність обчислення моменту сили відносно осі (рис.2):
1) необхідно провести площину (xy ), перпендикулярну осі z;
2) спроектувати силу на цю площину і знайти величину Fxy;
3). опустити із точки перетину О осі з площиною перпендикуляр на лінію дії і знайти його довжину h;
4) обчислити добуток Fxy·h;
5) визначити знак моменту.
Поодинокі випадки:
1) якщо сила паралельна осі, то її момент відносно осі дорівнює нулю (оскільки Fxy = 0);
2) якщо лінія дії сили перетинає вісь, то її момент відносно осі також дорівнює нулю (оскільки h=0);
3) якщо сила перпендикулярна осі, то її момент відносно цієї осі дорівнює взятому з відповідним знаком добутку модуля сили на відстань між лінією дії сили і віссю.
Поєднуючи пункти 1 і 2, відзначимо, що момент сили відносно осі дорівнює нулю, якщо сила і вісь лежать в одній площині.
Зазначимо, що теорема Варіньйона про момент рівнодійної справедлива і для моментів відносно будь-якої осі, тобто:
 .
.
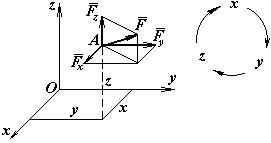
Рис.3
Аналітичні формули для моментів сили відносно координатних осей. Розкладемо силу , прикладену в точці А з координатами x, y, z, на складові  , паралельні координатним осям (рис.3).
, паралельні координатним осям (рис.3).
Оскільки  паралельна осі х, а
паралельна осі х, а  і
і  їй перпендикулярні, то з урахуванням знаків будемо мати:
їй перпендикулярні, то з урахуванням знаків будемо мати: 
 і в результаті
і в результаті  . Аналогічно знаходяться і моменти відносно осей y та z. Тоді остаточно маємо:
. Аналогічно знаходяться і моменти відносно осей y та z. Тоді остаточно маємо:
 ;
;
 ;
;
 .
.
Ці формули дають аналітичні вирази для моментів сили відносно координатних осей.
Оскільки ліві частини наведених вище рівнянь є проекціями вектора на координатні осі (де О початок координат), то:

Обчислення головного вектора і головного моменту просторової системи сил. Як ми відзначили вище, значення головного вектора  і головного моменту
і головного моменту  визначаються рівностями:
визначаються рівностями:  ;
;  (див. лекц. №6).
(див. лекц. №6).
Покажемо, як і обчислюються аналітично, що нам надалі знадобиться. Вирази для Rx, Ry, Rz нам уже відомі (див. лекц. №3). Проекції вектора на координатні осі будемо позначати Mx, My та Mz. Тоді для визначення проекцій головного вектора і головного моменту на осі координат маємо формули:
|
|
|


Отже, для задання (або визначення) будьякої системи сил, що діє на тверде тіло, достатньо задати (чи визначити) її головний вектор і головний момент відносно деякого центра, тобто шість величин, що входять у ліві частини рівнянь.
2. Зведення просторової системи сил до найпростішого вигляду
Ми вже говорили про те, що будь-яка система сил в загальному випадку зводиться до сили, що дорівнює головному вектору , прикладеному в довільному центрі О, і до пари з моментом, що дорівнює головному моменту (лекц. №6).
Визначимо, до якого найпростішого вигляду зводиться просторова система сил, яка не перебуває у рівновазі. Результат звичайно залежить від значень і .
1. Якщо для системи  , a
, a  , то вона зводиться до пари сил з моментом, який дорівнює і обчислюється за формулами, наведеними вище.
, то вона зводиться до пари сил з моментом, який дорівнює і обчислюється за формулами, наведеними вище.
2. Якщо для системи  ,
,  , то вона зводиться до рівнодійної, яка дорівнює , лінія дії якої проходить через центр зведення О. Формули для обчислення наведені вище.
, то вона зводиться до рівнодійної, яка дорівнює , лінія дії якої проходить через центр зведення О. Формули для обчислення наведені вище.
 3. Якщо для системи , , але
3. Якщо для системи , , але  , то система зводиться до рівнодійної, яка дорівнює , але не проходить через центр О.
, то система зводиться до рівнодійної, яка дорівнює , але не проходить через центр О.
Дійсно, якщо , то пара, що зображає її вектор , і сила лежать в одній площині (рис.4). Тоді обравши  , дістанемо, що і
, дістанемо, що і  зрівноважать одна одну, і система заміниться тільки силою
зрівноважать одна одну, і система заміниться тільки силою  , лінія дії якої проходить через точку O1. Відстань OO1=d визначається за формулою
, лінія дії якої проходить через точку O1. Відстань OO1=d визначається за формулою  .
.
Цей випадок має місце, коли сили паралельні між собою або лежать в одній площині.
 4. Якщо для системи сил ,
4. Якщо для системи сил ,  і при цьому вектор паралельний (рис.5,а), то це означає, що система сил зводиться до сукупності сили і пари
і при цьому вектор паралельний (рис.5,а), то це означає, що система сил зводиться до сукупності сили і пари  ,
,  , що лежить у площині, перпендикулярній силі (рис.5,б).
, що лежить у площині, перпендикулярній силі (рис.5,б).
Така сукупність сили і пари називається динамічним гвинтом, а пряма ОО', уздовж якої напрямлений вектор , віссю гвинта. До однієї сили або пари сил цю систему звести не можна.
5. Якщо для системи , , і при цьому вектори та не перпендикулярні і не паралельні один одному, то така система теж зводиться до динамічного гвинта, але вісь його буде проходити через центр С (рис.5,а).
|
|
|
3. Рівновага довільної просторової системи сил. Випадок паралельних сил
Необхідні й достатні умови рівноваги будь-якої системи сил виражаються рівностями ,  (див. лек. №6). Але вектори та дорівнюють нулю тільки тоді, коли
(див. лек. №6). Але вектори та дорівнюють нулю тільки тоді, коли  і
і  , тобто коли:
, тобто коли:

Таким чином, для рівноваги довільної просторової системи сил необхідно і достатньо, щоб суми проекцій всіх сил на кожну з трьох координатних осей і алгебраїчні суми їх моментів відносно цих осей дорівнювали нулю.
Якщо на тіло, крім сили, діє ще і пара сил, яка задається моментом  , то вигляд перших трьох рівнянь не зміниться (сума проекцій сил пар на будь-яку вісь дорівнює нулю), останні три матимуть вигляд:
, то вигляд перших трьох рівнянь не зміниться (сума проекцій сил пар на будь-яку вісь дорівнює нулю), останні три матимуть вигляд:

 Випадок паралельних сил. Якщо всі сили, що діють на тіло, паралельні одна одній, можна обрати координатні осі таким чином, щоб вісь z була паралельна силам (рис.6). Тоді проекції кожної із сил на осі x та y і їх моменти відносно осі z будуть дорівнювати О, тому будемо мати тільки три умови:
Випадок паралельних сил. Якщо всі сили, що діють на тіло, паралельні одна одній, можна обрати координатні осі таким чином, щоб вісь z була паралельна силам (рис.6). Тоді проекції кожної із сил на осі x та y і їх моменти відносно осі z будуть дорівнювати О, тому будемо мати тільки три умови:


Отже, для рівноваги просторової системи паралельних сил необхідно і достатньо, щоб алгебраїчна сума проекцій всіх сил на вісь, паралельну силам, і алгебраїчні суми їх моментів відносно двох інших координатних осей дорівнювали нулю.
4.Розв’язання задач. Послідовність розв’язання задач статики просторової системи сил така сама, як і у випадку плоскої системи сил. З’ясувавши, рівновага якого тіла розглядається, необхідно зобразити всі зовнішні сили (і задані, і реакції в’язей) і скласти умови рівноваги. Із здобутих рівнянь визначаються шукані величини.
Для спрощення системи рівнянь рекомендується осі координат проводити так, щоб вони перетинали якомога більше невідомих сил або були їм перпендикулярні.
Якщо із загального креслення важко визначити, чому дорівнює момент якоїсь сили відносно осі, то слід зобразити на додатковому кресленні проекцію тіла разом із силою на площину, перпендикуляру цій осі.
Якщо виникають труднощі у визначенні проекції сили на відповідну площину або плеча цієї проекції, рекомендується розкласти силу на дві взаємо перпендикулярні складові (одна із яких паралельна якій-небудь координатній осі), а потім скористатись теоремою Варіньйона.
|
|
|
 Задача. Прямокутна однорідна кришка вагою 120 Н утримується мотузкою DЕ (рис.7), перпендикулярною площині кришки. CD =
Задача. Прямокутна однорідна кришка вагою 120 Н утримується мотузкою DЕ (рис.7), перпендикулярною площині кришки. CD = . Знайти реакції циліндричних шарнірів А та В і натяг мотузки.
. Знайти реакції циліндричних шарнірів А та В і натяг мотузки.
Будемо розглядати рівновагу кришки. На неї діють сили: – вага,  – реакція мотузки, реакція шарнірів –
– реакція мотузки, реакція шарнірів –  і
і  . Останні розкладемо на складові так, що
. Останні розкладемо на складові так, що  ,
,  .
.
Усього маємо шість сил, із них п’ять невідомі. Всі сили перпендикулярні осі Ах, тому проекції їх на вісь Ах будуть дорівнювати нулю. Залишається п’ять рівнянь – саме стільки, скільки необхідно для розв’язання задачі.
Складемо рівняння рівноваги:
Із третього рівняння: 
Із четвертого: 
Із п’ятого: 
Із першого:

Із другого:

Питання для самоконтролю
1.Що називається моментом сили відносно осі?
2.В якій послідовності визначається момент сили відносно осі?
3.Назвати поодинокі випадки його визначення.
4.Довести аналітичні формули моментів сили відносно координатних осей.
5.Навести формули обчислення головного вектора і головного моменту просторової системи сил.
6.До якого найпростішого вигляду зводиться просторова система сил?
7.Які умови рівноваги довільної просторової системи?
8.Назвати умови рівноваги просторової системи паралельних сил.
МОДУЛЬ “КІНЕМАТИКА”
КІНЕМАТИКА МАТЕРІАЛЬНОЇ ТОЧКИ ТА ТВЕРДОГО ТІЛА
Лекція № 10
Тема: “Вступ. Способи задання руху точки. Вектори швидкості та прискорення”
1. Завдання кінематики, основні її поняття та визначення.
2. Кінематика точки. Способи задання руху точки.
3. Вектор швидкості точки.
4. Вектор прискорення точки.
1. Завдання кінематики, основні її поняття та визначення
Кінематикою називається розділ механіки, який вивчає рухи матеріальних тіл без урахування їх мас і сил, що діють на них.
Механічний рух відбувається у просторі та часі. Простір розглядається як трьохмірний. Час у класичній механіці вважається універсальним, тобто таким, що спливає однаково в різних системах відліку. Він є скалярною величиною, яка безперервно змінюється. У кінематиці час вважається незалежною змінною (аргументом). Решта змінних (відстань, швидкість, прискорення тощо) розглядаються як функції часу.
В основі кінематики лежать такі поняття як початковий момент часу, момент часу і проміжок часу. Початковий момент часу – це час, з якого починається відлік. Часто за початковий момент часу обирають значення t0=0. Даний момент часу визначається кількістю секунд, що проминули від початкового моменту. Проміжок часу – це різниця між будь-якими двома послідовними моментами часу.
Для визначити положення рухомого тіла відносно іншого вводиться поняття системи відліку. Система відліку – це система координат, яка жорстко зв'язана з тілом, по відношенню до якого вивчається рух. Оскільки в природі не існує нерухомих тіл, а отже, і абсолютно нерухомих систем відліку, то в механіці часто за умовно нерухому систему відліку обирають систему координатних осей, зв'язану з Землею.
Геометричне місце положень рухомої точки в обраній системі відліку називається траєкторією цієї точки. За виглядом траєкторії руху точки поділяються на прямолінійні та криволінійні.
У процесі вивчення руху точки слід розрізняти два важливих поняття: пройдений шлях і відстань. Відстань – це довжина відрізка траєкторії, відрахованого від деякої нерухомої точки, яка обирається за початок відліку. Відстань – величина алгебраїчна, оскільки в залежності від положення точки відносно початку відліку і від обраного напрямку осі вона може бути як додатною, так і від'ємною.
Рухаючись, точка за певний проміжок часу проходить деякий шлях, який вимірюється вздовж траєкторії в напрямку руху. Шлях може тільки збільшуватись, тому − це величина додатна. Шлях збігається з абсолютним значенням відстані тільки тоді, коли рух точки починається від початку відліку і відбувається по траєкторії в одному напрямі.
Для розв'язування задач кінематики необхідно, щоб рух був якось заданий (описаний). Задати рух або закон руху тіла (точки) – означає задати положення його відносно даної системи відліку в будь-який момент часу.
Кількість незалежних параметрів, які визначають положення точки, тіла або системи, називається кількістю ступенів вільності. Вільне тверде тіло має шість ступенів вільності в просторовому русі.
Головне завдання кінематики полягає в тому, щоб знаючи закон руху даного тіла або точки, визначити кінематичні характеристики (траєкторії, швидкості, прискорення) тіла в цілому і кожної його точки окремо.
Розпочнемо вивчення цього розділу із кінематики точки.
2. Кінематика точки. Способи задання руху точки
Задати рух точки можна одним із трьох способів: натуральним, координатним або векторним.
 1. Натуральний спосіб. Цим способом користуються в тому випадку, коли траєкторія руху точки відома.
1. Натуральний спосіб. Цим способом користуються в тому випадку, коли траєкторія руху точки відома.
Нехай точка М рухається по деякій траєкторії АВ відносно обраної системи відліку (рис.1). Візьмемо на ній довільну точку  , яка буде за початок відліку. Траєкторію розглянемо як криволінійну координату. Домовимося про додатний і від'ємний напрямки руху.
, яка буде за початок відліку. Траєкторію розглянемо як криволінійну координату. Домовимося про додатний і від'ємний напрямки руху.
Тоді положення точки М буде визначатися криволінійною координатою s, яка дорівнює відстані від точки до точки М, що береться з відповідним знаком. У кожний момент часу точка може займати тільки одне відповідне положення на траєкторії, тому відстань s від початку відліку є деяка однозначна функція часу t. Залежність між змінними s і t називається законом руху точки М уздовж траєкторії.
Спосіб задання руху точки у вигляді s=f(t) називається натуральним.
Отже, при натуральному способі задання руху точки повинні бути відомі:
- траєкторія точки в обраній системі відліку;
- початок відліку на траєкторії і додатний напрямок відліку;
- закон руху точки вздовж траєкторії: s=f(t).
 2. Координатний спосіб. Через те, що траєкторія руху точки відома далеко не завжди, на практиці частіше користуються координатним способом задання руху.
2. Координатний спосіб. Через те, що траєкторія руху точки відома далеко не завжди, на практиці частіше користуються координатним способом задання руху.
Положення точки по відношенню до даної системи відліку Оxyz можна визначити її декартовими координатами х, у, z (рис.2).
Під час руху точки М її координати будуть змінюватись з плином часу, тобто будуть деякими функціями аргументу t:
x = f1(t), y = f2(t), z = f3(t).
 Якщо ми будемо знати, як змінюються з часом координати точки, яказдійснює деякий рух, тобто будуть відомі ці рівняння, то ми завжди зможемо визначити положення її відносно обраної системи відліку.
Якщо ми будемо знати, як змінюються з часом координати точки, яказдійснює деякий рух, тобто будуть відомі ці рівняння, то ми завжди зможемо визначити положення її відносно обраної системи відліку.
Якщо весь час точка рухається в одній площині, то, обравши останню за площину Оху, рух точки можна визначити двома рівняннями руху (рис.3):
х = f1(t), y = f2(t).
 Якщо ж точка рухається прямолінійно, то траєкторію її руху (пряму) можна обрати за одну із координатних осей, наприклад, х. Рух точки в такому випадку буде описуватись одним рівнянням (рис.4):
Якщо ж точка рухається прямолінійно, то траєкторію її руху (пряму) можна обрати за одну із координатних осей, наприклад, х. Рух точки в такому випадку буде описуватись одним рівнянням (рис.4):
х =f(t).
Рівняння руху точки тут є одночасно і рівняннями її траєкторії.
 3. Векторний спосіб. Положення точки в будь-який момент часу можна визначити за допомогою вектора
3. Векторний спосіб. Положення точки в будь-який момент часу можна визначити за допомогою вектора  , проведеного із деякої точки О в дану точку М (рис.5).
, проведеного із деякої точки О в дану точку М (рис.5).
Вектор називається радіусом-вектором точки М. Оскільки з плином часу модуль і напрямок вектора змінюються, то він є векторною функцією часу:
 .
.
Це рівняння називається рівнянням руху точки у векторній формі. Воно виражає не тільки закон її руху, а й рівняння траєкторії точки у векторній формі.
Крива, яку описує кінець якого-небудь вектора за умови, що його початок знаходиться весь час в одній і тій же точці, називається годографом вектора. Отже, траєкторією точки М є годограф радіуса-вектора .
Зв'язок між векторним і координатним способами легко встановити, якщо ввести одиничні вектори (орти) осей  ,
,  ,
,  , тобто такі вектори, які чисельно дорівнюють одиниці й напрямлені вздовж осей x, y, z (рис.5). Обравши точку О за початок прямокутної системи координат і розклавши радіус-вектор по осях координат, маємо вираз для визначення положення точки М:
, тобто такі вектори, які чисельно дорівнюють одиниці й напрямлені вздовж осей x, y, z (рис.5). Обравши точку О за початок прямокутної системи координат і розклавши радіус-вектор по осях координат, маємо вираз для визначення положення точки М:
 .
.
Векторний спосіб задання руху достатньо зручний для встановлення загальних закономірностей. Він дозволяє описати рух точки одним рівнянням на відміну від координатного, де кількість рівнянь дорівнює трьом. Але при розв'язуванні конкретних задач, коли вимагається чисельний результат, частіше зручнішими є координатний або натуральний способи.
3. Вектор швидкості точки
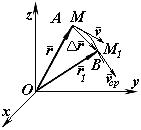 Рис.6
Рис.6
|
Однією з важливих кінематичних характеристик руху точки є її швидкість, яка є мірою руху точки і характеризує бистроту зміни її положення з плином часу. Швидкість – величина векторна.
Нехай деяка точка, яка здійснює рух по криволінійній траєкторії АВ, в момент часу t займає на траєкторії положення М, що визначається радіусом-вектором , а в момент t1 –положення М1, яке визначається радіусом-вектором  (рис. 6).
(рис. 6).
Тоді за проміжок часу  переміщення точки визначається вектором
переміщення точки визначається вектором  , який називається вектором переміщення точки. Із ΔОММ1 бачимо, що
, який називається вектором переміщення точки. Із ΔОММ1 бачимо, що
 .
.
Звідси:
 .
.
Відношення вектора переміщення точки до проміжку часу Δt назвемо середньою за модулем і напрямком швидкістю точки за цей проміжок часу Δt,тобто:
 .
.
Середня швидкість  напрямлена вздовж хорди ММ1 у бік руху точки.
напрямлена вздовж хорди ММ1 у бік руху точки.
Очевидно, чим меншим буде проміжок часу Δt, тим точніше буде середня швидкість характеризувати рух точки. Якщо проміжок часу Δt прямує до нуля, то граничне значення швидкості наближається до значення швидкості в даний момент часу:
 .
.
Таким чином, швидкістю точки в даний момент часу називається векторна величина  , до якої прямує швидкість з наближенням проміжку часу до нуля. А оскільки граничне значення відношення
, до якої прямує швидкість з наближенням проміжку часу до нуля. А оскільки граничне значення відношення  при Dt®0 є не що інше, як перша похідна від вектора по аргументу t, то маємо:
при Dt®0 є не що інше, як перша похідна від вектора по аргументу t, то маємо:
 .
.
Отже, вектор швидкості в даний момент часу дорівнює першій похідній від радіуса-вектора точки за часом.
Оскільки граничним напрямком січної ММ1 є дотична, то вектор швидкості в даний момент часу напрямний по дотичній, яка проведена до траєкторії точки в бік її руху.
Якщо точка рухається прямолінійно, то вектор її швидкостівесь час напрямлений вздовж траєкторії точки (прямої), змінюється лише чисельно. Якщо траєкторія руху – крива, то вектор швидкості може змінюватись як за величиною, так і за напрямком. Рух, в якому швидкість з часом зростає, називається прискореним; рух, в якому швидкість з часом зменшується, називається сповільненим.
Величина, яка характеризує бистроту зміни швидкості точки з плином часу (як за модулем, так і за напрямком), називається прискоренням точки.
 Прискорення – величина векторна.
Прискорення – величина векторна.
Нехай точка, яка рухається по криволінійній траєкторії, в момент часу t займає на траєкторії положення М і має швидкість , а в момент t1 – положення М1 і швидкість  (рис.7). Визначимо приріст швидкості
(рис.7). Визначимо приріст швидкості  за проміжок часу
за проміжок часу  . Для цього вектор перенесемо в точку М. Сполучивши кінці векторів та , отримаємо . Зауважимо, щовектор завжди напрямлений у бік угнутості траєкторії.
. Для цього вектор перенесемо в точку М. Сполучивши кінці векторів та , отримаємо . Зауважимо, щовектор завжди напрямлений у бік угнутості траєкторії.
Відношення приросту вектора швидкості до проміжку часу ∆t визначає вектор середнього прискорення точки за цей проміжок часу:
 .
.
Напрямок вектора  , як видно, збігається з напрямком .
, як видно, збігається з напрямком .
Прискоренням точки в даний момент часу називається векторна величина  , до якої прямує середнє прискорення з наближенням проміжку часу Δt до нуля:
, до якої прямує середнє прискорення з наближенням проміжку часу Δt до нуля:
 або
або  .
.
Отже, вектор прискорення точки в даний момент часу дорівнює першій похідній від вектора швидкості або другій похідній від радіуса-вектора точки за часом.
Визначимо напрямок вектора по відношенню до траєкторії руху точки. Якщо точка рухається прямолінійно, то вектор прискорення напрямлений вздовж прямої, по якій вона рухається, що очевидно. Якщо траєкторією руху є плоска крива, то вектор прискорення, як і , лежить у площині цієї кривої і напрямлений у бік її угнутості. У загальному ж випадку вектор лежить у стичній площині й напрямлений у бік угнутості кривої.
Питання для самоконтролю
1. Що вивчає розділ “Кінематика”?
2.Дати означення початковому моменту часу, даному моменту та проміжку часу.
3.Чим відрізняються поняття “відстань” та “шлях”? Коли відстань збігається зі шляхом?
4.Що таке траєкторія руху точки, кількість ступенів вільності точки або тіла?
5. У чому полягає головне завдання кінематики?
6. Які існують способи задання руху точки? Їх сутність.
7. Зв’язок координатного та векторного способів задання руху.
8.Що називається середньою швидкістю точки за проміжок часу Δt? Який напрямок вона має?
9. Дати означення вектору швидкості в даний момент часу. Його напрямок. Чому він дорівнює?
10. Що називається середнім прискоренням точки за проміжок часу Δt? Як воно напрямлене?
11.Дати означення вектору прискорення в даний момент часу. Його напрямок. Формули визначення.
Лекція № 11
Тема: “Визначення швидкості та прискорення точки при різних способах задання її руху”
План
1. Визначення швидкості й прискорення точки при координатному способі задання її руху.
2. Визначення швидкості й прискорення точки при натуральному способі задання руху.
3. Деякі поодинокі випадки руху точки.
1. Визначення швидкості й прискорення точки при координатному способі задання її руху
Як відомо, вектор швидкості точки визначається першою похідною від радіуса-вектора за часом:
 .
.
Але відповідно за формулою
 ,
,
де орти , , – сталі як за модулем, так і за напрямком.
Тоді:

Якщо визначити вектор швидкості через його проекції на координатні осі, то дістанемо:
Порівнюючи ці вирази, помічаємо, що:

Таким чином, проекції вектора швидкості точки на осі координат дорівнюють першим похідним від відповідних координат точки за часом.
Знайдемо модуль і напрямок вектора швидкості за формулами:
 ;
;

Аналогічно визначається прискорення точки:

Звідси знайдемо проекції вектора прискорення та координатні осі:

Отже, проекції вектора прискорення точки на координатні осі дорівнюють першимпохідним від проекцій вектора швидкості або другим похідним від відповідних координат точки за часом.
Модуль і напрямок прискорення визначаються за формулами:

2. Визначення швидкості й прискорення точки при натуральному способі задання руху
Нехай задана траєкторія і закон руху точки у вигляді s = f(t).
 Точка за проміжок часу Δt перемістилася з положення М у положення М1 (рис.1). При цьому переміщення становить Δs=s1–s. Визначимо числову величину її середньої швидкості:
Точка за проміжок часу Δt перемістилася з положення М у положення М1 (рис.1). При цьому переміщення становить Δs=s1–s. Визначимо числову величину її середньої швидкості:
 .
.
Щоб знайти числову величину швидкості в даний момент часу t, перейдемо за границі:

Отже, числова величина швидкості в даний момент часу дорівнює першій похідній від відстані (криволінійної координати) s точки за часом.
 Вектор швидкості напрямлений по дотичній до траєкторії точки, причому, якщо v>0, то в додатному напрямку відліку відстані, а якщо v<0, то у від'ємному.
Вектор швидкості напрямлений по дотичній до траєкторії точки, причому, якщо v>0, то в додатному напрямку відліку відстані, а якщо v<0, то у від'ємному.
Вектор прискорення при натуральному способі задання руху визначається проекціями, але не на координатні осі системи відліку Оxyz, а на рухомі осі Мτnb, які мають початок у точці М і рухаються разом з нею (рис.2,б). Ці осі називають осями натурального тригранника. Вісь Мτ (дотична) напрямлена по дотичній до траєкторії руху точки в бік додатного відліку відстані, вісь Мn (головна нормаль) – по нормалі, яка лежить у стичній площині, й напрямлена в бік угнутості кривої, вісь Мb (бінормаль) – перпендикулярна двом попереднім. Як було показано в попередній лекції, вектор прискорення лежить у стичній площині, тому його проекція на бінормаль дорівнює нулю. Визначимо його проекції на дві інші осі. Проектуючи обидві частини рівності  на осі Мτ та Мn і позначаючи символами
на осі Мτ та Мn і позначаючи символами  та
та  проекції вектора
проекції вектора  на ці осі, дістанемо:
на ці осі, дістанемо:
Вектор – це різниця між швидкостями в двох сусідніх точках М і М1, тобто  Відкладемо вектори
Відкладемо вектори  і
і  від спільної точки (рис.2,а). Тоді
від спільної точки (рис.2,а). Тоді , а фігуру АСВD при нескінченно малому куті dφ можна розглядати як прямокутник. Звідси:
, а фігуру АСВD при нескінченно малому куті dφ можна розглядати як прямокутник. Звідси:

де dv – елементарний приріст числового значення швидкості.
Оскільки границя відношення дуги до хорди дорівнює одиниці, можна АD розглядати як елементарну дугу радіуса МА, розмір якої визначається добутком радіуса на центральний кут. Тоді:
 .
.
Підставляючи визначені значення  і
і  у рівняння, маємо:
у рівняння, маємо:
Кут між дотичними до кривої в двох її точках називається кутом суміжності, тоді dφ – елементарний кут суміжності.
Відношення dφ до  визначає кривизну кривої в точці М, а кривизна k є величиною, оберненою до радіуса кривизни ρ у цій точці, тобто:
визначає кривизну кривої в точці М, а кривизна k є величиною, оберненою до радіуса кривизни ρ у цій точці, тобто:

тому:
 .
.
Отже, остаточно маємо:
 .
.
Отже, проекція вектора прискорення точки на дотичну вісь дорівнює першій похідній від числової величини швидкості або другій похідній від відстані (криволінійної координати) s за часом, а проекція вектора прискорення на головну нормаль дорівнює квадрату швидкості, поділеному на радіус кривизни траєкторії в даній точці кривої.
Повне прискорення визначимо як геометричну суму складових (рис.3):
 .
.
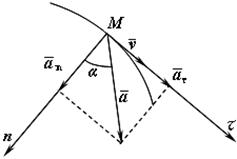 Рис.3
Рис.3
|
Перший доданок у рівнянні називається дотичним прискоренням, а другий – нормальним. Вектор  напрямлений завжди в бік угнутості кривої (величина завжди додатна), а
напрямлений завжди в бік угнутості кривої (величина завжди додатна), а  може бути напрямлений або в додатному, або у від'ємному напрямку осі Мτ, що залежить від знака проекції. Оскільки вектор нормального прискорення напрямлений до центра кривизни траєкторії, то його ще називають доцентровим.
може бути напрямлений або в додатному, або у від'ємному напрямку осі Мτ, що залежить від знака проекції. Оскільки вектор нормального прискорення напрямлений до центра кривизни траєкторії, то його ще називають доцентровим.
Модуль повного прискорення обчислюється так:
Відхилення вектора прискорення від нормалі Мn характеризується кутом α, який визначається за формулою:
 .
.
3. Деякі поодинокі випадки руху точки
Розглянемо деякі поодинокі випадки руху матеріальної точки.
1. Прямолінійний рух. Якщо траєкторією точки є пряма лінія, то ρ=∞, тоді  , і повне прискорення точки дорівнює одному тільки дотичному прискоренню:
, і повне прискорення точки дорівнює одному тільки дотичному прискоренню:
 .
.
Оскільки в цьому випадку швидкість змінюється тільки чисельно, то звідси робимо висновок, що дотичне прискорення характеризує зміну числового значення швидкості.
2. Рівномірний криволінійний рух. Рівномірним називається такий криволінійний рух точки, в якому числове значення швидкості весь час залишається сталим (v=const). Тоді  ,і повне прискорення дорівнює одному тільки нормальному прискоренню:
,і повне прискорення дорівнює одному тільки нормальному прискоренню:

Вектор прискорення напрямлений при цьому весь час по нормалі до траєкторії точки.
Оскільки в цьому випадку прискорення з'являється тільки за рахунок зміни напрямку швидкості, то звідси робимо висновок, що нормальне прискорення характеризує зміну швидкості за напрямком.
Знайдемо закон рівномірного криволінійного руху. Із формули  маємо: ds=vdt. Нехай у початковий момент часу (t0=0) точка знаходиться від початку відліку на відстані s0. Тоді:
маємо: ds=vdt. Нехай у початковий момент часу (t0=0) точка знаходиться від початку відліку на відстані s0. Тоді:

Або враховуючи, що v=const, дістанемо:
s-s0=vt,
звідси маємо:
s=s0+vt.
Якщо s0=0, то s дасть шлях, пройдений точкою за час t. Отже, при рівномірному русі шлях, пройдений точкою, зростає пропорційно часу, а швидкість точки дорівнює відношенню шляху до часу:
 .
.
3. Рівномірний прямолінійний рух. У цьому випадку an=aτ=0, а отже, a=0. Це єдиний рух, в якому прискорення точки весь час дорівнює нулю.
4. Рівнозмінний криволінійний рух. Рівнозмінним називається такий криволінійний рух точки, в якому дотичне прискорення залишається весь час сталим: aτ= const. Знайдемо закон цього руху, якщо відомо, що в початковий момент часу t0=0: s=s0, а v=v0 (s0 та v0 – початкові відстань та швидкість).
Оскільки dv=aτdt, а aτ=const, то беручи інтеграли з обох частин у відповідних границях, маємо:
v=v0+aτt
або
 ,
,
звідки:
ds=v0dt+ aτtdt.
Якщо ще раз проінтегруємо останню рівність, знайдемо закон рівнозмінного криволінійного руху точки:
Ці формули виражають також закон рівнозмінного прямолінійного руху точки, якщо вважати s=x. При цьому в рівняннях aτ=а, де а – числове значення прискорення даної точки.
5. Гармонійні коливання. Гармонійні коливання точки відбуваються за законом
x=Acos kt,
де А, k – сталі величини.
Величина А, яка дорівнює найбільшому відхиленню точки від центра коливань, називається амплітудою коливань.
Проміжок часу Т=2π/k, за який точка здійснює одно повне коливання, називається періодом коливань.
Беручи похідні від х за часом, знайдемо швидкість і прискорення точки:
v= – Aksin kt; a= – Ak2cos kt.
Питання для самоконтролю
1.Як визначається величина та напрямок швидкості точки при координатному способі задання її руху?
2.Як визначається прискорення точки при координатному способі задання її руху?
3.Як визначається швидкість при натуральному способі задання руху точки?
4.Як визначається прискорення точки при натуральному способі задання її руху?
5.Якими формулами описуються прямолінійний, рівномірний криволінійний, рівномірний прямолінійний та рівнозмінний криволінійний рухи?
Лекція № 12
Тема: “Поступальний і обертальний рухи твердого тіла”
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 2911; Нарушение авторских прав?; Мы поможем в написании вашей работы!