КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
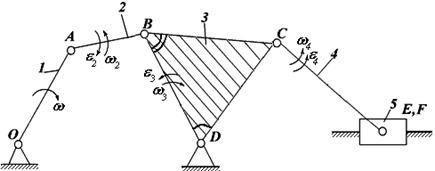
План швидкостей
|
|
|
|
Розпочинається кінематичний аналіз із ведучої групи. Оскільки кутова швидкість обертання ведучої ланки відома, то:
vA=ω  , м/с.
, м/с.
Вектор  напрямлений перпендикулярно кривошипу в бік його обертання.
напрямлений перпендикулярно кривошипу в бік його обертання.
Розглянемо групу Ассура ABD. Відомі швидкості точок A та D: щойно визначили, а  , тоді:
, тоді:

або
 .
.
Розв’яжемо цю рівність графічно, тобто побудовою плану швидкостей. Для цього обираємо за полюс точку р (рис.2,б), з якої відкладаємо відрізок pa довільної довжини, що зображає вектор швидкості . Масштаб побудови обчислюємо за формулою:
 ,
, .
.
а)
б) в)
Рис.2
Через точку а та з полюса (точку d) проводимо прямі, перпендикулярні ланці АВ та стороні BD ланки 3 до їх перетину. Точка перетину b визначить кінець вектора абсолютної швидкості точки В.
Користуючись методом подібних фігур, визначаємо швидкість  точки С.
точки С.
Розглянемо наступну групу Ассура CEF. Швидкість точки С щойно визначили, а швидкість точки F, як такої, що належить стояку, дорівнює 0. Тоді:

Розв’язуючи цю систему рівнянь, маємо:

Розв’яжемо останнє рівняння графічно. З цією метою з точки с плану швидкостей проведемо пряму, перпендикулярну ланці СЕ (напрямок швидкості  ), а із полюса (точки f) – горизонтальну пряму (напрямок швидкості
), а із полюса (точки f) – горизонтальну пряму (напрямок швидкості  ) до їх перетину. Точка перетину е і визначає кінець вектора абсолютної швидкості
) до їх перетину. Точка перетину е і визначає кінець вектора абсолютної швидкості  .
.
Дійсні значення швидкостей:
 ;
;  ;
; 
Визначимо кутові швидкості обертання ланок 2, 3 та 4:
 ;
;  ;
;  .
.
Покажемо їх напрямки на кінематичній схемі механізму.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 531; Нарушение авторских прав?; Мы поможем в написании вашей работы!