КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теорема про рух центра мас системи. Закон збереження руху центра мас
План
План
План
1.Кількість руху матеріальної точки. Імпульс сили.
2.Теорема про зміну кількості руху точки.
3.Кількість руху системи.
4.Теорема про зміну кількості руху системи. Закон збереження кількості руху системи.
5.Теорема про зміну моменту кількості руху точки (теорема моментів).
6.Головний момент кількості руху системи.
7.Теорема про зміну головного моменту кількості руху системи (теорема моментів).
Для розв’язання багатьох задач динаміки (особливо в динаміці системи) замість безпосереднього інтегрування диференціальних рівнянь руху здається ефективнішим користуватись загальними теоремами, які є висновками основного закону динаміки.
Їх значення полягає у тому, що вони встановлюють наочні залежності між відповідними динамічними характеристиками тіл. Крім того, застосування теорем позбавляє необхідності інтегрувати і цим самим спрощує процес розв’язання задачі.
Перейдемо до розгляду загальних теорем динаміки.
1. Кількість руху матеріальної точки. Імпульс сили
Кількість руху – одна із основних динамічних характеристик руху точки.
Кількістю руху матеріальної точки називається векторна величина  , яка дорівнює добутку маси точки на її швидкість. Цей вектор напрямлений так само, як і швидкість точки, тобто по дотичній до її траєкторії. Одиниця вимірювання в системі СІ – 1 кг ּ м/с =1 Н ּ с.
, яка дорівнює добутку маси точки на її швидкість. Цей вектор напрямлений так само, як і швидкість точки, тобто по дотичній до її траєкторії. Одиниця вимірювання в системі СІ – 1 кг ּ м/с =1 Н ּ с.
Для характеристики дії сили на тіло за деякий проміжок часу вводиться поняття імпульсу сили.
Елементарним імпульсом сили називається векторна величина  , яка дорівнює добутку сили
, яка дорівнює добутку сили  на елементарний проміжок часу dt:
на елементарний проміжок часу dt:

Напрямлений елементарний імпульс вздовж лінії дії сили.
Імпульс  будь-якої сили за кінцевий проміжок часу
будь-якої сили за кінцевий проміжок часу  дорівнює:
дорівнює:

 .
.
Отже, імпульс сили за деякий кінцевий проміжок часу дорівнює визначеному інтегралу від елементарного імпульсу, взятому від нуля до .
Зокрема, якщо – величина стала (=const), то:

У загальному випадку модуль імпульсу може бути обчислений за його проекціями на координатні осі:



Одиницею вимірювання імпульсу в системі СІ є 1 кг ּ м/с = 1 Н ּ с, тобто така, як і кількості руху.
2. Теорема про зміну кількості руху точки
Оскільки  , то основний закон динаміки можна записати у вигляді:
, то основний закон динаміки можна записати у вигляді:
Це рівняння виражає одночасно теорему про зміну кількості руху в диференціальній формі: похідна від кількості руху точки за часом дорівнює геометричній сумі всіх сил, що діють на точку.
Нехай точка має в момент часу t=0 швидкість  , а в момент – швидкість
, а в момент – швидкість  . Помножимо обидві частини рівності на dt і візьмемо інтеграл:
. Помножимо обидві частини рівності на dt і візьмемо інтеграл:
Праворуч інтеграли є імпульсами сил. Тому остаточно:

Це рівняння виражає теорему про зміну кількості руху точки в кінцевому вигляді: зміна кількості руху точки за деякий проміжок часу дорівнює сумі імпульсів всіх сил, що діють на точку, за той же проміжок часу.
При розв'язанні задач замість векторного рівняння часто користуються рівняннями в проекціях:
3. Кількість руху системи
Кількістю руху системи будемо називати векторну величину  , яка дорівнює геометричній сумі (головному вектору) кількості руху всіх точок системи (рис.1):
, яка дорівнює геометричній сумі (головному вектору) кількості руху всіх точок системи (рис.1):

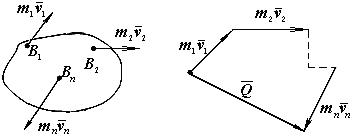
Рис.1
Із рівності  (див. лекц.№29) виходить, що:
(див. лекц.№29) виходить, що:
Беручи із обох частин похідну за часом, дістанемо:
 або
або 
звідси:

Тобто, кількість руху системи дорівнює добутку маси всієї системи на швидкість її центра мас.
Із формули бачимо, що якщо тіло (або система) рухається так, що центр мас її залишається нерухомим, то кількість руху тіла дорівнює нулю. Наприклад, тіло, яке обертається навколо нерухомої осі, що проходить через його центр мас. Якщо ж рух тіла є складним, то величина не залежить від обертального руху навколо центра мас.
4. Теорема про зміну кількості руху системи. Закон збереження кількості руху системи
Нехай система складається із n матеріальних точок. Тоді дістанемо:

Остання сума за властивостями внутрішніх сил дорівнює нулю. Крім цього:
Остаточно маємо:

Це рівняння виражає теорему про зміну кількості руху системи в диференціальній формі: похідна за часом від кількості руху системи дорівнює геометричній сумі всіх зовнішніх сил, що діють на систему.
У проекціях на координатні осі маємо:



Нехай у момент часу t=0 кількість руху системи дорівнювала  , а в момент
, а в момент  . Тоді після інтегрування дістанемо:
. Тоді після інтегрування дістанемо:
або

Це рівняння виражає теорему про зміну кількості руху системи в інтегральній формі: зміна кількості руху системи за деякий проміжок часу дорівнює сумі імпульсів всіх зовнішніх сил, що діють на систему, за той же проміжок часу.
У проекціях на координатні осі будемо мати:

Із теореми про зміну кількості руху системи можна зробити висновки:
1. Якщо сума всіх зовнішніх сил, що діють на систему, дорівнює нулю:

тоді =const. Отже, якщо сума всіх зовнішніх сил, які діють на систему, дорівнює нулю, то вектор кількості руху системи буде сталим за модулем і напрямком.
2. Якщо зовнішні сили, що діють на систему, такі, що сума їх проекцій на яку-небудь вісь (наприклад Oх) дорівнює нулю:

тоді Qx=const. Таким чином, якщо сума проекцій всіх зовнішніх сил, які діють на систему, на яку-небудь вісь дорівнює нулю, то проекція кількості руху системи на цю вісь є величиною сталою.
Ці результати і виражають закон збереження кількості руху системи.
5. Теорема про зміну моменту кількості руху точки (теорема моментів)
У деяких задачах замість кількості руху розглядають її момент відносно деякого центра або осі.
Ці моменти визначаються так само, як і моменти сили.
Таким чином, моментом кількості руху точки відносно деякого центра О називається векторна величина  , яка визначається рівністю:
, яка визначається рівністю:

де  – радіус-вектор точки, проведений із центра О.
– радіус-вектор точки, проведений із центра О.
Момент напрямлений перпендикулярно площині, яка проходить через і центр О, а  (рис.2).
(рис.2).
 Момент кількості руху точки відносно якої-небудь осі Oz, яка проходить через центр О, буде дорівнювати проекції вектора на цю вісь:
Момент кількості руху точки відносно якої-небудь осі Oz, яка проходить через центр О, буде дорівнювати проекції вектора на цю вісь:

де γ – кут між вектором і віссю Oz.
Теорема моментів встановлює, як змінюється з часом . Щоб її довести, продиференціюємо за часом вираз  дістанемо:
дістанемо:

Але  , як векторний добуток двох паралельних векторів, а
, як векторний добуток двох паралельних векторів, а  , або при дії декількох сил
, або при дії декількох сил  , тоді:
, тоді:
 або
або 
Отже, ми довели теорему моментів відносно центра: похідна за часом від моменту кількості руху точки, взятого відносно якого-небудь нерухомого центра, дорівнює моменту сили, що діє на точку, відносно того ж центра.
Якщо спроектувати обидві частини останнього рівняння на яку-небудь вісь Oz, яка проходить через центр О, то дістанемо:
Це рівняння виражає теорему моментів відносно осі.
Якщо  , то
, то  , тобто якщо момент сили відносно деякого центра дорівнює нулю, то момент кількості руху точки відносно цього центра є величиною сталою.
, тобто якщо момент сили відносно деякого центра дорівнює нулю, то момент кількості руху точки відносно цього центра є величиною сталою.
6. Головний момент кількості руху системи
Головним моментом кількості руху (або кінетичним моментом) системи відносно даного центра О називається величина  , яка дорівнює геометричній сумі моментів кількості руху всіх точок системи відносно цього центра:
, яка дорівнює геометричній сумі моментів кількості руху всіх точок системи відносно цього центра:
Аналогічно визначаються моменти кількості руху системи відносно координатних осей:

При цьому Kx, Ky i Kz ‑ проекції вектора на координатні осі.
Головний момент кількості руху (кінетичний момент) системи може розглядатися як характеристика її обертального руху.
Якщо тіло обертається навколо осі з кутовою швидкістю ω, то швидкість точки, розміщеної на відстані hk від осі обертання, дорівнює  , тоді для неї
, тоді для неї  або
або

Величина в дужках є не що інше, як момент інерції тіла відносно осі z. Остаточно:

Таким чином, кінетичний момент тіла, яке обертається, відносно осі обертання дорівнює добутку моменту інерції тіла відносно цієї осі на кутову швидкість тіла.
Ця формула справедлива і для повороту тіла навколо миттьової осі обертання  з кутовою швидкістю ω, отже:
з кутовою швидкістю ω, отже:

7. Теорема про зміну головного моменту кількості руху системи(теорема моментів)
Теорема моментів, доведена для однієї матеріальної точки, справедлива для кожної точки системи.
Якщо розглянути точку системи масою mk, яка має швидкість  , то будемо мати:
, то будемо мати:

де  і
і  – рівнодійні всіх зовнішніх i внутрішніх сил.
– рівнодійні всіх зовнішніх i внутрішніх сил.
Для всіх точок системи:

Остання сума за властивостями внутрішніх сил дорівнює нулю. Тоді:
Ця рівність виражає теорему моментів системи: похідна за часом від головного моменту кількості руху системи відносно деякого нерухомого центра дорівнює сумі моментів всіх зовнішніх сил системи відносно цього ж центра.
Проектуючи обидві частини рівності на нерухомі осі Oxyz, дістанемо:

Розглянуті вище теореми мають важливе значення. У кінематиці було показано, що рух твердого тіла в загальному випадку складається із поступального руху разом з полюсом і обертального навколо нього. Якщо за полюс взяти центр мас, то поступальна частина руху тіла може бути вивчена за допомогою теореми про зміну кількості руху (про рух центра мас), а обертальна – за допомогою теореми моментів.
Питання для самоконтролю
1. Що називається кількістю руху матеріальної точки? Одиниці її вимірювання.
2. Дати означення елементарному імпульсу сили.
3. Чому дорівнює імпульс сили за кінцевий проміжок часу? У випадку = const?
4. Сформулювати та довести теорему про зміну кількості руху матеріальної точки.
5. Що називається кількістю руху системи?
6. Вивести формулу визначення кількості руху системи.
7. Сформулювати і довести теорему про зміну кількості руху системи.
8. Викласти закон збереження кількості руху системи.
9. Дати означення моменту кількості руху точки відносно центра та осі.
10. Сформулювати і довести теорему про зміну моменту кількості руху точки відносно центра та осі.
11. Як визначається кінетичний момент системи відносно центра та осі?
12. Сформулювати та довести теорему про зміну кінетичного моменту системи.
Лекція № 31
Тема: “Теореми про зміну кінетичної енергії матеріальної точки і системи”
1.Робота сили. Потужність.
2.Теорема про зміну кінетичної енергії матеріальної точки.
3.Кінетична енергія системи.
4.Теорема про зміну кінетичної енергії системи.
1. Робота сили. Потужність
Для характеристики дії сили на тіло на деякому його переміщенні вводиться поняття роботи сили. Спочатку скажемо про елементарну роботу.
Елементарною роботою сили , прикладеної в точці М (рис.1), називається скалярна величина, що дорівнює:

де Fτ – проекції сили на дотичну Mτ до траєкторії точки М, напрямлену в бік переміщення цієї точки (або проекція на напрямок швидкості  точки М); ds – модуль елементарного переміщення точки М
точки М); ds – модуль елементарного переміщення точки М 
Якщо розкласти силу на складові  і
і  , то змінювати модуль швидкості буде , оскільки
, то змінювати модуль швидкості буде , оскільки  (складова змінює напрямок вектора швидкості ).
(складова змінює напрямок вектора швидкості ).
 Із рис.1 бачимо, що
Із рис.1 бачимо, що  , де α – кут між і Mτ. Тоді дістанемо, що
, де α – кут між і Mτ. Тоді дістанемо, що

Якщо кут α гострий, то робота додатна, якщо α=0, то  .
.
Якщо кут α тупий, то робота від'ємна. При α=1800  .
.
Якщо α=900, тобто якщо сила напрямлена перпендикулярно переміщенню, то елементарна робота сили дорівнює нулю.
Знак роботи містить у собі такий зміст: робота додатна, коли складова напрямлена в бік руху (сила прискорює руху); робота від'ємна, коли складова напрямлена в бік, протилежний руху (сила сповільнює рух).
Якщо врахувати, що  , де
, де  – вектор елементарного переміщення точки, то:
– вектор елементарного переміщення точки, то:
 .
.
Отже, елементарна робота сили дорівнює скалярному добутку сили на вектор елементарного переміщення точки її прикладання.
Виразимо скалярний добуток через проекції на координатні осі:

де x, y, z – координати точки прикладання сили .
Робота сили на будь-якому кінцевому переміщенні M0M1 (рис.1) обчислюється як границя інтегральної суми відповідних елементарних робіт:
або

Отже, робота сили на будь-якому переміщенні M0M1 дорівнює взятому вздовж цього переміщення інтегралу від елементарної роботи.
Якщо сила стала ( = const), то, позначаючи M0M1 через s1, дістанемо:

Зокрема, якщо сила стала за модулем і напрямком ( =const), а точка, до якої прикладена сила, рухається прямолінійно (рис.2), то в цьому випадку:  , а
, а 
Одиницею вимірювання роботи в системі СІ є 1Джоуль (1Дж = 1Н ּ м= 1кг ּ м2/с2).
Потужність. Потужністю називається величина, яка визначає роботу, що здійснює сила за одиницю часу. Якщо робота виконується рівномірно, то

де t1 – час, за який виконана робота A.
У загальному випадку:
Отже, потужність дорівнює добутку дотичної складової сили на швидкість.
Одиницею вимірювання потужності в системі СІ є 1Ват (1Вт = 1Дж/с). У техніці за одиницю потужності часто вживають кінську силу (1к.с.), яка дорівнює 736Вт.
Роботу, виконану машиною, можна вимірювати добутком її потужності на час роботи. Звідси 1кіловат-година (1кВт ּ г = 3,6 ּ 106Дж).
Із рівності N=Fτv видно, що у двигуна, який має певну потужність, сила тяги Fτ буде тим більшою, чим менша швидкість v.
2. Теорема про зміну кінетичної енергії матеріальної точки
Другою основною динамічною характеристикою руху точки є кінетична енергія.
Кінетичною енергією матеріальної точки називається скалярна величина  , яка дорівнює половині добутку маси точки на квадрат її швидкості.
, яка дорівнює половині добутку маси точки на квадрат її швидкості.
Одиниця вимірювання її та ж, що й роботи, тобто в системі СІ – 1Дж. Визначимо залежність між цими величинами.
Нехай матеріальна точка масою m переміщається із положення М0, де вона мала швидкість v0, в положення M1, де її швидкість v1.
Запишемо залежність, яка виражає основний закон динаміки:

Проектуючи її на дотичну Mτ до траєкторії точки M, напрямлену в бік руху, дістанемо:

Дотичне прискорення подамо у вигляді:
У результаті:
Помножимо обидві частини рівняння на ds і занесемо m під знак диференціалу. Тоді Fkτds=dAk, де dAk – елементарна робота сили  . У результаті дістанемо вираз для теореми про зміну кінетичної енергії точки в диференціальній формі:
. У результаті дістанемо вираз для теореми про зміну кінетичної енергії точки в диференціальній формі:
Проінтегрувавши обидві частини цієї рівності в межах, які відповідають значенням змінних М0 і M1, остаточно знайдемо:
Це рівняння виражає теорему про зміну кінетичної енергії точки в кінцевому вигляді: зміна кінетичної енергії точки на деякому її переміщенні дорівнює алгебраїчній сумі робіт всіх сил, що діють на точку, на тому ж переміщенні.
Теорема дає можливість, знаючи як в процесі руху точки змінюється її швидкість, визначити роботу сил (перша задача) або, знаючи роботу сил, що діють на точку, визначити, як змінюється у процесі руху швидкість точки (друга задача динаміки).
3. Кінетична енергія системи
Кінетичною енергією системи називається величина Т, яка дорівнює сумі кінетичних енергій всіх точок системи:

Кінетична енергія є характеристикою і поступального, і обертального руху системи.
Кінетична енергія Т – величина скалярна на відміну від кількості руху і кінетичного моменту відносно центра . Відмінною рисою Т є і те, що на її зміну впливає дія внутрішніх і зовнішніх сил.
Розглянемо, як визначається кінетична енергія тіла в різних випадках руху.
1. Поступальний рух. У цьому випадку всі точки рухаються з однаковими швидкостями, які дорівнюють швидкості центра мас. Отже, vk=vc, тоді:
або

Таким чином, кінетична енергія тіла у поступальному русі дорівнює половині добутку маси тіла на квадрат швидкості його центра мас.
2. Обертальний рух. Якщо тіло обертається навколо осі Oz, то швидкість будь-якої його точки vk=ωhk, де hk – відстань точки від осі обертання, а ω – кутова швидкість тіла. Підставляючи значення в формулу і виносячи спільні множники за дужки, дістанемо:

Величина в дужках є моментом інерції тіла відносно осі z. Таким чином,

Кінетична енергія тіла у обертальному русі дорівнює половині добутку моменту інерції тіла відносно осі обертання на квадрат його кутової швидкості.
3. Плоскопаралельний рух. Плоскопаралельний рух тіла можна подати як обертальний рух навколо миттьового центра швидкостей Р (рис.3). Тоді,
 де
де  – момент інерції тіла відносно осі, яка проходить через миттьовий центр швидкостей; ω – кутова швидкість обертання тіла.
– момент інерції тіла відносно осі, яка проходить через миттьовий центр швидкостей; ω – кутова швидкість обертання тіла.
Величина – змінна, оскільки положення центра Р у процесі руху весь час змінюється. Визначимо цей момент інерції як:
 де d=PC.
де d=PC.
Оскільки Р – миттьовий центр швидкостей, то ωd=ω PC=vc, де vc – швидкість центра мас С (рис.3), остаточно:
Отже, у плоскопаралельному русі кінетична енергія тіла дорівнює енергії поступального руху зі швидкістю центра мас та енергії обертального руху навколо центра мас.
4. Теорема про зміну кінетичної енергії системи
Теорема про зміну кінетичної енергії матеріальної точки справедлива для будь-якої точки системи. Отже, якщо розглянути довільну точку системи масою mk, яка має швидкість vk, то:
де  і
і  – елементарні роботи зовнішніх і внутрішніх сил, що діють на точку. Або для всіх точок системи:
– елементарні роботи зовнішніх і внутрішніх сил, що діють на точку. Або для всіх точок системи:
або

Ця рівність виражає теорему про зміну кінетичної енергії системи в диференціальній формі.
Проінтегрувавши обидві частини рівності в границях, які відповідають переміщенню системи із початкового положення, де кінетична енергія дорівнювала T0, у положення, де значення кінетичної енергії дорівнює T1, дістанемо:

Ця рівність виражає теорему про зміну кінетичної енергії системи в інтегральній формі: зміна кінетичної енергії системи на деякому її переміщенні дорівнює сумі робіт на цьому переміщенні всіх зовнішніх і внутрішніх сил, прикладених до системи.
Внутрішні сили тут залишаються. Так, нехай  і
і  – сили взаємодії між точками В1 і В2, тоді
– сили взаємодії між точками В1 і В2, тоді  (рис. 4). Але при цьому точка В1 може переміщатись у напрямку до В2, а В2 – у напрямку до В1. Тоді робота кожної сили буде додатна, і сума їх робіт не дорівнюватиме нулю.
(рис. 4). Але при цьому точка В1 може переміщатись у напрямку до В2, а В2 – у напрямку до В1. Тоді робота кожної сили буде додатна, і сума їх робіт не дорівнюватиме нулю.
 Тільки у випадку незмінної системи будемо мати, що сума робіт всіх внутрішніх сил дорівнює нулю, тоді:
Тільки у випадку незмінної системи будемо мати, що сума робіт всіх внутрішніх сил дорівнює нулю, тоді:
 або
або 
Незмінними системами називають такі, у яких відстань між кожними двома її точками за весь час руху залишається сталою.
Питання для самоконтролю
1.Дати означення елементарній роботі. Формула визначення та її аналіз.
2.Як визначається робота на кінцевому переміщенні точки?
3. Що таке потужність? За якою формулою вона визначається? Одиниці її вимірювання.
4.Що називається кінетичною енергією точки? Одиниці її вимірювання.
5.Сформулювати і довести теорему про зміну кінетичної енергії точки.
6.Як визначається кінетична енергія поступального, обертального і плоскопаралельного рухів тіла?
7.Сформулювати і довести теорему про зміну кінетичної енергії системи.
Лекція №32
Тема: “Теорема про рух центра мас. Застосування загальних теорем динаміки до руху твердого тіла”
1.Диференціальні рівняння руху системи.
3.Диференціальні рівняння обертального руху твердого тіла навколо нерухомої осі.
4.Диференціальні рівняння плоскопаралельного руху твердого тіла.
1. Диференціальні рівняння руху системи
Для k -ої матеріальної точки системи масою mk, яка має прискорення  , маємо:
, маємо:
Аналогічний результат будемо мати для будь-якої точки системи, отже:

де і  – рівнодійні всіх зовнішніх і внутрішніх сил, які діють на точку.
– рівнодійні всіх зовнішніх і внутрішніх сил, які діють на точку.
Ці рівняння є диференціальними рівняннями руху системи у векторній формі ( ). Сили в загальному випадку можуть залежати від часу, координат точок системи і їх швидкостей.
). Сили в загальному випадку можуть залежати від часу, координат точок системи і їх швидкостей.
Якщо спроектувати ці рівності на які-небудь координатні осі, дістанемо диференціальні рівняння руху системи в проекціях на координатні осі.
Повний розв'язок другої задачі динаміки для системи полягає в тому, щоб, знаючи задані сили і накладені в'язі, проінтегрувати відповідні диференціальні рівняння і визначити в результаті закон руху кожної із точок системи та реакції в'язі. Але досить часто не виникає необхідності в знаходженні закону руху кожної точки, а достатньо знайти характеристики, які визначають рух системи в цілому. У цьому випадку частіше застосовуються загальні теореми динаміки.
|
|
Дата добавления: 2014-10-23; Просмотров: 1284; Нарушение авторских прав?; Мы поможем в написании вашей работы!