КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теоретическая часть. И Исследование структурной модели асинхронной машины
|
|
|
|
И Исследование структурной модели асинхронной машины
Лабораторная работа № 5. СОЗДАНИЕ
ЦЕЛЬ РАБОТЫ: ознакомиться с методом построения структурных моделей на примере асинхронной машины (АМ).
В качестве примера структурного моделирования рассмотрим динамическую модель обобщенной асинхронной машины, которая может быть представлена двумя схемами замещения по поперечной и продольной осям (рис. 5.1).
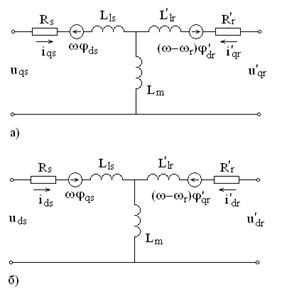
Рис. 5.1. Схемы замещения обобщенной асинхронной машины по поперечной (a) и продольной (б) осям
Динамика асинхронной машины описывается системой уравнений
 (5.1)
(5.1)
где индекс s относится к статору, индекс r – к ротору; индекс d соответствует продольной оси, индекс q – поперечной; u – напряжение; R – активное сопротивление; ψ – потокосцепление обмотки; ωс – синхронная частота вращения; ωr – частота вращения ротора в электрических радианах в секунду; ω – частота вращения ротора в реальных радианах в секунду; ΣМ – суммарный момент на валу ротора; штрихованные величины соответствуют приведенным величинам ротора.
Следует учесть, что для двухфазной обобщенной машины справедливы следующие соотношения:
 (5.2)
(5.2)
где Ls, L’r – индуктивности обмоток статора и ротора; L1s, L’1r – индуктивности рассеяния обмоток статора и ротора; Lm – индуктивность ветви намагничивания; Mэм – электромагнитный момент; Mн – момент нагрузки на валу машины.
С учетом (5.2) система уравнений (5.1) принимает вид
 (5.3)
(5.3)
В матричной форме (5.3) принимает вид
 , (5.4)
, (5.4)
или
 , (5.5)
, (5.5)
где  – квадратная матрица коэффициентов;
– квадратная матрица коэффициентов;  – вектор неизвестных величин;
– вектор неизвестных величин;  – вектор правых частей.
– вектор правых частей.
Структурная схема решения системы уравнений (5.5) в среде Simulink представлена на рис. 5.2.
|
|
|
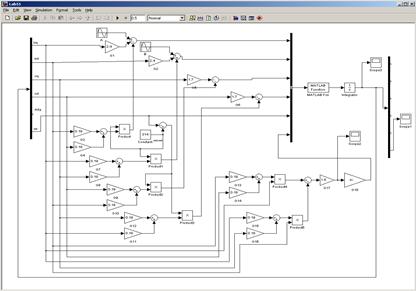
Рис. 5.2. Структурная схема решения системы уравнений АМ
Здесь особый интерес представляет блок Matlab Function, в котором осуществляется обращение к подпрограмме, написанной на языке m-файлов MatLab, которая осуществляет формирование матрицы коэффициентов, обращает ее и умножает на вектор правых частей . При этом на выходе формируется вектор производных  . Программный код выглядит следующим образом:
. Программный код выглядит следующим образом:
function dXdt = GetMatrix(X)
L1 = 0.01;
L2 = 0.01;
Lm = 0.18;
Ls = L1 + Lm;
Lr = L2 + Lm;
G = [...
[ Ls, 0, Lm, 0, 0, 0];...
[ 0, Ls, 0, Lm, 0, 0];...
[ Lm, 0, Lr, 0, 0, 0];...
[ 0, Lm, 0, Lr, 0, 0];...
[ 0, 0, 0, 0, 1, 0];...
[ 0, 0, 0, 0, 0, 1]...
];
dXdt = G^-1*X;
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 354; Нарушение авторских прав?; Мы поможем в написании вашей работы!