КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аналитический метод
|
|
|
|
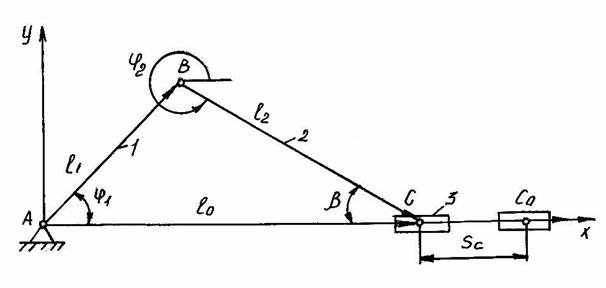
Рис. 2.2. К определению перемещения ползуна кривошипно-ползунного механизма
В тех случаях, когда необходимо получить высокую точность, применяют аналитические методы. Решения задачи аналитическим методом в общем случае сложны, т.к. зачастую приводят к громоздким вычислениям. Наиболее удобный способ для аналитического метода - это составление условия замкнутости всех закрытых контуров механизма, рассматриваемых как векторные многоугольники.
Исходными данными для реализации этого метода служат кинематическая схема, представленная в прямоугольной системе координат, линейные размеры всех звеньев и аналитическая зависимость изменения обобщенной координаты, определяющей положение ведущего звена.
В качестве примера рассмотрим кривошипно-ползунный механизм. Кинематическая схема механизма (рис. 2.2) представляет собой замкнутый векторный треугольник, уравнение замкнутости которого:
 (2.2)
(2.2)
Это условие можно также представить уравнениями проекций векторов на оси системы координат xAy (начало системы координат находится на оси вращения А) в виде:
 } (2.3)
} (2.3)
где j1, j2 - углы, образованные звеньями 1 и 2 с осью Ах (рис. 2.2); l1, l2 - длины звеньев 1 и 2; l1 = хс - отстояние звена 3.
В этих уравнениях знаки при слагаемых определяются знаками тригонометрических функций.
В уравнениях (2.3) l1 и l2 и угол поворота ведущего звена j1 известны, подлежат определению величины j2 и хс.
Используя геометрические соотношения замкнутой цепи АВС и записав значение:
sin j2 = - sin b = -  (2.4)
(2.4)
где  - теорема синусов.
- теорема синусов.
Можно получить положение ведомого звена в зависимости от угла j1 поворота кривошипа в виде хс = l1cosj1 + l2cos[arcsin ( j1)], а обозначив
j1)], а обозначив  , получим:
, получим:
хс = l1cosj1 +l2 (2.5)
(2.5)
|
|
|
|
|
Дата добавления: 2014-10-31; Просмотров: 314; Нарушение авторских прав?; Мы поможем в написании вашей работы!