КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Електродвигуни
Електромеханічні старанні механізми
Електродвигун перетворить енергію електромагнітного поля в механічну енергію обертання ротора.
У АСУ ТП використовують електродвигуни, вихідні характери-стики яких визначаються величиной сигналу, що управляє. Вони дістали назву старанних, або керованих, элек-тродвигателей і можуть бути постійного струму, змінного струму і крокового.
Особливістю старанних двигунів на відміну від сило-вых є те, що вони практично ніколи не працюють в но-минальном режимі. Для їх роботи характерні часті пуски, ос-тановки, реверси.
Електродвигуни постійного струму легше управляються, але двигуни змінного струму надійніші, простіші і дешевші. Крокові електродвигуни забезпечують покрокове переміщення ре-гулирующих органів.
Основні вимоги, що пред'являються до старанних элект-родвигателям:
- широкий діапазон регулювання швидкості обертання;
- великий пусковий момент;
- простота регулювання;
- відсутність «самохода», тобто здатність двигуна останавли-ваться відразу ж після зняття сигналу управління;
- можливість реверсування;
- висока швидкодія;
- велика потужність при малих габаритних розмірах.
Першими з'явилися двигуни постійного струму. У 30-х рр. XIX ст. російський учений Б.С.Якоби побудував діючий электродви-гатель, основні елементи якого збереглися до теперішнього часу. Він став основним старанним двигуном приво-дов, що вимагають плавного регулювання швидкості обертання в широкому діапазоні. У кінці XIX ст. М. О. Доливо-Добровольский запропонував конструкцію трифазного асинхронного электродви-гателя змінного струму з короткозамкнутим ротором, що став основою асинхронних старанних приводів.
Електродвигуни постійного струму. Електродвигун посто-янного струму (мал. 6.1, а) складається із статора з полюсами, на кото-рых розміщена обмотка збудження, якорі з обмоткою і кілок-лектора з щітками.
В якості старанних електродвигунів малої мощнос-ти широке застосування знайшли магнітоелектричні двигате-ли, магнітне поле яких створюється за рахунок постійних магни-тов(мал. 6.1, б).
Обмотки полюсів двигуна служать для створення постійного магнітного поля, в якому обертається якір. Якщо до обмотки якоря прикласти напругу U, то в ній потече струм Iя (мал. 6.2, а).


Взаємодія струму і магнітного поля створить электромагнит-ную силу, яка змусить якір рухатися. Як тільки він почне обертатися (перетинати магнітне поле), в його обмотках наведеться ЭДС ея, що створює струм, спрямований назустріч струму від прило-женного напруги. В результаті струм в якорі визначатиметься різницею між напругою живлення і наведеною ЭДС:
 (6.1)
(6.1)
де Д, — опір обмотки якоря.
Колектор в електродвигунах постійного струму служить для перетворення постійної напруги, що підводиться до щет-кам, в змінну напругу в обмотці якоря, що дозволяє зберегти незмінним його напрям обертання (мал. 6.2, б).
У момент пуску, коли ея = 0, струм якоря може досягати значи-тельной величини (див. формулу (6.1)), що вимагає застосування в схемі пускового реостата (ПР), що включається послідовно з якірною обмоткою Я1-Я2 (мал. 6.2, в). У міру розгону двигуна опір пускового реостата зменшується до нуля (мал. 6.3, а). Струм Ib в обмотці збудження III1 — Ш2 залишається незмінним;
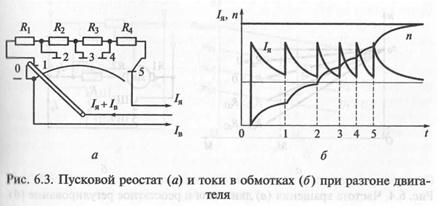
при цьому струм якоря /я і частота обертання п досягають установив-шихся значень (мал. 6.3, б).
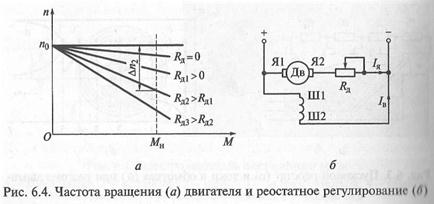
Двигун постійного струму має «жорстку» механічну характеристику (залежністю частоти обертання від моменту навантаження), тобто при збільшенні навантаження частота обертання умень-шается трохи (мал. 6.4, о, пряма Rд = 0).
Регулювання частоти обертання двигуна постійного струму можливо за рахунок:
- зміни опору Rд в ланцюзі якоря — реостатне ре-гулирование (мал. 6.4, б). При цьому частота обертання двигуна без навантаження п0 залишається незмінною, а з появою моменту нагруз-ки Мн на валу змінюється в широкому діапазоні (див. мал. 6.4, а);
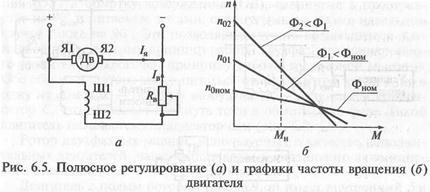
- зміни струму в обмотках збудження — полюсне регулиро-вание (мал. 6.5, а) шляхом зміни опору Rв, в ланцюзі воз-буждения. При цьому змінюється частота обертання як без нагруз-ки, так і з навантаженням (мал. 6.5, б). Полюсне регулювання яв-ляется економічним, оскільки управління магнітним потоком збудження здійснюється за рахунок зміни струму збудження Iв, величина якого невелика;
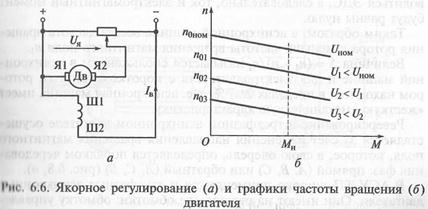
- зміни напруги живлення Uя якірної обмотки — якор-ное регулювання (мал. 6.6, а). При цьому потік збудження дол-жен залишатися незмінним. Це мають бути двигуни з неза-висимым, паралельним збудженням або магнітоелектричні двигуни. Частота обертання двигуна практично лінійно за-висит від напруги живлення якірної обмотки Uя (мал. 6.6, б).
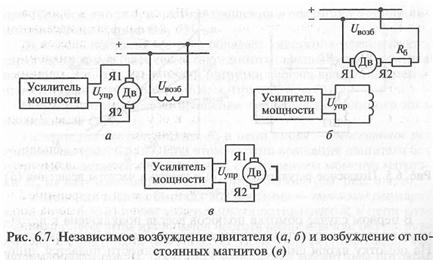
Широке застосування в якості старанних знайшли дви-гатели постійного струму з незалежним збудженням і возбуж-дением від постійних магнітів.
При незалежному збудженні в якості обмотки управління використовується або обмотка якоря — якірне регулювання (мал. 6.7, а), або обмотка полюсів — полюсне регулювання (мал. 6.7, б).
У першому випадку обмотка полюсів завжди підключена до источ-нику постійної напруги і є обмоткою збудження. На обмотку якоря сигнал з підсилювача потужності подається лише тоді, коли потрібне обертання якоря. У другому випадку до ис-точнику постійної напруги завжди підключена обмотка якоря, яка виконує роль обмотки збудження. Управляю-щей обмоткою є обмотка полюсів. Для обмеження пус-ковых струмів в якірній обмотці під час перехідних режимів послідовно з нею включається баластний опір Rб.
У двигунах зі збудженням від постійних магнітів управля-ющей обмоткою завжди є обмотка якоря, т. е. такі двига-тели завжди працюють з якірним регулюванням (мал. 6.7, в).
Основними перевагами старанних двигунів по-стоянного струму є можливість плавного регулювання їх частоти обертання від нуля до максимального значення, високий пусковий момент і висока швидкодія.
Основними недоліками двигунів постійного струму явля-ются невисока надійність і недовговічність із-за наявності кілок-
лектора і щіток, які можуть стиратися, забиватися пилом і продуктами зносу, а також іскрити.
Електродвигуни змінного струму. Електродвигуни перемен-ного струму можуть бути асинхронними і синхронними.
Асинхронні двигуни в порівнянні з машинами постоянно-го струму надійніші і довговічніші, простіші конструктивно і в обслуговуванні, мають ширший діапазон потужностей.
Принцип дії трифазного асинхронного двигуна осно-ван на взаємодії магнітного поля, що обертається, із струм-мі, що наводяться в обмотках ротора цим полем. Поміщений в магнітне поле, що обертається, ротор з обмоткою починає вра-щаться у напрямі магнітного поля.
Проте наздогнати поле ротор не може, оскільки інакше потік перестане перетинати обмотку і в ній не буде на-водиться ЭДС, а отже, струм і електромагнітний момент дорівнюватимуть нулю.
Таким чином, в асинхронній машині завжди частота враще-ния ротора п менше частоти обертання магнітного поля щ.
Величина S= (n1 - n)/n1 називається ковзанням в асинхром ний машині і для електродвигуна з короткозамкнутим рию ром знаходиться в межах 2...7 %, тобто асинхронна машина маючи «жорстку» механічну характеристику.
Реверсування в трифазному асинхронному двигуні осуще ствляется за рахунок зміни напряму обертання магнітить п моля, яке, у свою чергу, визначається порядком звичаєм ними фаз: прямий (А, В, С) або зворотний(мал. 6.8, а).
У АСУ ТПI широко застосовуються і двофазні асинхронні двигуни.Вони мають на статорі дві обмотки: обмотку управління (ОУ) і обмотку збудження (ОВ), зрушені в простран-стве на 90° і живлені струмами, зрушеними по фазі в ідеальному випадку також на 90°. Це дозволяє отримати маг-нитное поле, що обертається, тому принцип роботи двофазного асинхронно-го двигуна аналогічний принципу роботи трифазної машини. Обидві обмотки статора можуть живитися від однієї і тієї ж мережі, але в одну з обмоток — обмотку збудження — включається конден-сатор З, що дозволяє зрушити струми в обмотках по фазі. Такий двигун називається конденсаторним (мал. 6.8, б).
Ротор двофазних машин, використовуваних в якості исполни-тельных двигунів, частіше виконується у вигляді порожнистої алюминие-вого скляночки.
Двигун з порожнистим ротором (мал. 6.9, а) має внутрішній 5 і зовнішній 2 статори з набірного заліза, розташовані на кор-пусе На зовнішньому статорі розміщуються дві обмотки 3, сдвину-тые в просторі на 90°. Внутрішній статор служить для умень-шения опору магнітному потоку. Між статорами на осі 4 обертається алюмінієва тонкостінна скляночка — ротор 6 (товщина стінок — 0,1... 1,0 мм.)
Робота двигуна з порожнистим ротором заснована на взаємодії магнітного поля, що обертається, створюється обмотками стато-ра, з вихровими струмами, що наводяться цим полем в алюминие-вом скляночці. Момент інерції порожнистого ротора малий, тому бы-стродействие двигуна велике.
Великий активний опір тонкостінної скляночки і «м'яка» механічна характеристика n = f(Мн) двигуна з по-лым ротором дозволяють зменшувати частоту обертання ротора за рахунок зміни напруги, що підводиться, від максимальної (синхронною) майже до нуля. Таке управління називається ампли-тудным (мал. 6.9, б).
Якщо напругу живлення обмоток залишити незмінним, а змінювати кут зрушення фаз між струмами в обмотках з допомогою

фазозсувного ланцюжка, то частота обертання ротора теж бу-дет змінюватися; таке управління називається фазовим.
Можна змінювати і амплітуду напруги, що управляє, і фазу — це амплітудно-фазове управління.
Двофазний двигун з одним з розглянутих способів управління частотою обертання може використовуватися в якості старанного, тоді як трифазні асинхронні двига-тели застосовують в якості силових.
На мал. 6.9, би приведена також схема пуску асинхронного дви-гателя. Після спрацьовування вимикача В натискається кнопка «Пуск» і по обмотці контактора До тече струм. Контактор срабаты-вает і замикає контакти ланцюга живлення обмоток статора, а також контакти, блокуючі кнопку «Пуск». Для зупинки двигуна необхідно натиснути кнопку «Стоп», яка розриває ланцюг пита-ния обмотки контактора, і той розриває ланцюг обмоток статора і розблоковує контакти, включені паралельно кнопці «Пуск».
На мал. 6.10, а представлений двигун з короткозамкнутим ро-тором, а на мал. 6.10, би — двигун з порожнистим ротором.
Оскільки частота обертання асинхронного двигуна определяет-ся частотою мережі і зазвичай складає близько 3 ТОВ про/мін, в кон-струкцию старанного механізму зазвичай вводиться редуктор. Це дозволяє отримати прийнятні швидкості переміщення ра бочих органів.
Асинхронний двигун з короткозамкнутим ротором і редук тором, званий також мотор-редуктором, представлений на рис 6.11.
Синхронні двигуни — це електричні машини, частота обертання ротора п яких дорівнює частоті обертання магнітного поля п{, створюваного обмоткою статора.
У основі роботи синхронного двигуна лежить взаємодія магнітного поля статора, що обертається, з постійним магнит-ным полем ротора.
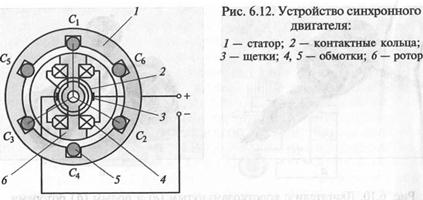
Статор / синхронного двигуна (мал. 6.12) нічим не отличает-ся від статора асинхронного і має обмотки 5, службовці для створення магнітного поля, що обертається. Ротор синхронної ма-шины 6 має обмотку 4, виконану ізольованим прово-дом і живлену постійним струмом через контактні кільця 2 і щітки 3. Основне призначення обмоток ротора — створення посто-янного магнітного поля.
В процесі роботи відбувається взаємодія зовнішнього і внутрішнього магнітних полів: зовнішнє поле, що обертається, за рахунок «зчеплення» магнітних полів захоплює за собою ротор, причому кутові швидкості обертання внутрішнього і зовнішнього полів ока-зываются однаковими.

Живлення обмотки ротора постійним струмом має два недо-статка: потрібне джерело постійної напруги; контакт-ное пристрій (кільця з щітками) знижує надійність.
Цих недоліків позбавлені електродвигуни, в яких замість електромагніту в роторі використовується постійний магніт з вы-сокой коэрцитивной силою. Такі двигуни називаються гістерезисними. У їх роторах магніти заливаються алюмінієм, утворюючи суцільний циліндр (мал. 6.13, а). Алюміній грає роль пускової обмотки, в якій під дією магнітного поля, що обертається, наводяться вихрові струми. Під дією цих струмів ротор прихо-дит в обертання аналогічно порожнистому ротору асинхронного двига-теля. Потужність таких машин невелика — до 300 Вт.
Широко застосовуються в якості машин малої потужності так-же реактивні електродвигуни. У них джерело постійного маг-нитного поля на роторі відсутнє. Його обертання забезпечується особливою формою ротора (мал. 6.13, би, в) і «пружністю» магнітних силових ліній, яка примушує ротор за відсутності нагруз ки розташовуватися по осі полюсів статора і обертатися синхронно з полем статора. За наявності навантаження ротор відстає від осі по-
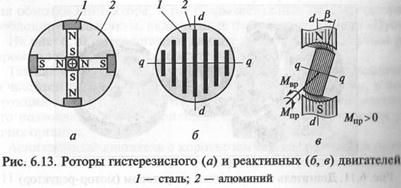
люсов на кут р, але продовжує обертатися з синхронною скоро-стью (т. е. з тією ж швидкістю, що і магнітне поле).
У роторі, представленому на мал. 6.13, би, сталеві смуги 1 залиті алюмінієм 2, а на мал. 6.13, в ротор виконаний у вигляді ско-шенного з боків циліндра з феромагнітного матеріалу. У обох випадках намагніченість по осі а"-а" забезпечується значитель-но легше, ніж по осі д-д.
Схеми включення обмоток статора синхронного і асинхрон-ного двигунів аналогічні, оскільки в обох випадках статор служить для створення магнітного поля, що обертається.
Основне застосування синхронні двигуни знайшли в устрой-ствах, в яких необхідно підтримувати незмінною швидкість обертання основних вузлів: в стрічкопосувних механізмах, самопи-шущих і реєструючих приладах, електромагнітних муфтах.
Крокові електродвигуни. Цифрова форма представлення сигналів управління в ЕОМ привела до створення нового типу дви-гателей — крокових, які безпосередньо перетворять уп-равляющий сигнал у вигляді послідовності імпульсів у фик-сированный кут повороту валу або лінійне переміщення.
У основі роботи крокових двигунів лежить прагнення маг-нитного потоку замикатися по шляху найменшого опору. У них статор і ротор, виконані з феромагнітного матери-ала, мають спрямовані один до одного прямокутні виступи (полюсы), розташовані рівномірно (мал. 6.14, а). Число полю-сов на статорі і роторі однаково і досить велике — від де-сятков до 200 і більше. Статор складається з трьох секцій, располо-женных впритул один до одного, на яких розміщені окремі обмотки. Полюсы усіх секцій статора поєднані. Обмотки сек-ций включаються в систему управління незалежно один від одного. Ротор також складається з трьох секцій, розташованих на одному валу, але полюсы другої секції зміщені відносно полю-
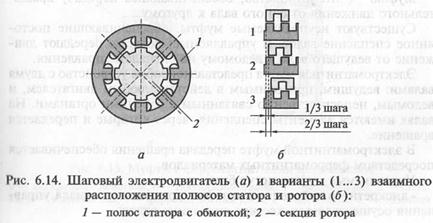
сов першої секції на 1/3 кроки полюсів, а третьої секції — на 2/3 кроки.
Якщо виступ ротора знаходиться під виступом статора (мал. 6.14, би, положення 1), то магнітний опір ланцюга статор-ро-тор найменше. При подачі напруги в обмотку статора цієї секції ротор залишається нерухомим. Якщо ж напругу подати в обмотку статора сусідньої секції, то ротор обертається на 1/3 кроки полюсів (див. мал. 6.14, би, положення 2), тобто до тих пір, поки полюс ротора не виявиться під полюсом статора. Якщо подати напругу в обмотку наступної секції, то станеться пово-рот ще на 1/3 кроки (див. мал. 6.14, би, положення 3) і так далі
Таким чином, кут повороту ротора визначатиметься ко-личеством імпульсів, що послідовно подаються в обмотки, а швидкість повороту — частотою цих імпульсів. Точність кутового переміщення в крокових двигунах досягає 0,5°, а частота — більше 1 ТОВ кроків в секунду. Реверс забезпечується за рахунок зміни послідовності подачі імпульсів в секції статора.
Широке застосування крокові двигуни знайшли в якості ис-полнительных для переміщення робочих органів в металлорежу-щих верстатах, причому їх потужність може знаходитися в діапазоні від одиниць до сотень ватів. Якщо ж потужність недостатня, то застосовується агрегат з крокового двигуна з гидроусилителем.
Основними достоїнствами крокових двигунів є ра-бота безпосередньо від дискретних сигналів ЕОМ без їх преоб-разования, висока точність позиціонування, надійність, простота і довговічність; основними недоліками — невысо-кие ККД і потужність.
|
|
Дата добавления: 2014-11-26; Просмотров: 2455; Нарушение авторских прав?; Мы поможем в написании вашей работы!