КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Расчет на маневренном планшете маневра расхождения с несколькими целями одновременно
|
|
|
|
Маневр по расхождению с несколькими встречными судами одновременно является наиболее сложным, но необходимость в нем возникает все чаще, особенно в районах оживленного судоходства. Предлагавшиеся до сих пор способы расчета этого маневра основаны на применении специальных палеток, скрывают от оператора физический смысл маневра и поэтому не прививаются на флоте.
Наиболее рациональным является расчет с построением секторов опасных относительных курсов (COOK), предложенный О. Г. Моревым. Расчет маневра предлагаемым способом производится следующим образом (рис. 18.2):
— с обнаружением на экране встречных судов (цели № 1, 2, 3) ведут за каждое из них относительную прокладку на маневренном планшете;
— проведя ЛОДи ЛОД2 и ЛОД3, выявив опасность чрезмерного сближения с одной или несколькими целями, определяют их ЭДЦ (VМ1, VМ2_ и VМ3);
— по цели с максимальной относительной скоростью (сближение с которой на Dкр произойдет раньше) назначают момент ее прихода в упрежденную позицию и наносят на этот момент упрежденные позиции каждой цели 1Mц, 2МЦ, ЗМЦ;
— из упрежденной позиции каждой цели проводят касательные к окружности Dоз, определяя опасный сектор (ОС) каждой цели;
— в конце каждого вектора истинной скорости цели Vм1, Vм2, Vм3 строят сектор опасных относительных курсов;
— для безопасного расхождения со всеми целями одновременно изменяют свой курс или скорость так, чтобы конец своего вектора скорости VK располагался вне пределов COOK.
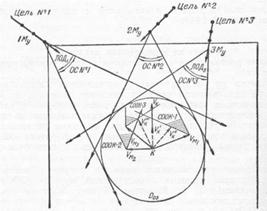
Рис. 18.2. Расчет маневра расхождения с несколькими целями одновременно на маневренном планшете
На рис. 18.2 видно, что уменьшение скорости до величины V'k позволяет разойтись со всеми целями на Dkp больше Doз. Если конец своего вектора скорости Vv будет лежать на границе СООК-1, то расхождение с целью № 1 произойдет на дистанции Doз, а с другими — на большей дистанции. Если конец своего вектора скорости V''к будет находиться в точке пересечения сторон СООК-2 и СООК-3, то расхождение на Doз произойдет с этими двумя целями, а с целью № 1 — на большей дистанции. Рассчитанные варианты расхождения докладываются командиру корабля для выбора и утверждения одного из них. Окончанием маневра расхождения со всеми целями можно считать момент прихода последней из них на относительный траверз.
|
|
|
* В режиме автосопровождения точность определения пеленга и дистанции РЛС «Океан» на расстояниях до 16 миль составляет 0,5—0,7° и 30—40 м соответственно.
|
|
|
|
|
Дата добавления: 2014-11-16; Просмотров: 2293; Нарушение авторских прав?; Мы поможем в написании вашей работы!