КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Предикатне керування
|
|
|
|
НМ2
НМ
r
Рис. 5.2. Схема попереднього інверсного навчання
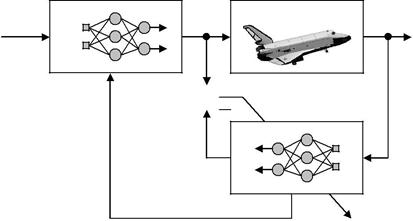
Розглянемо схему на рис. 5.3. Нейроемулятор НМ2 навчається зворотній динаміці ОК, а нейроконтролер НМ1 просто копіює свої параметри з НМ2.
| X НМ1 | u | ОК | y |
 e
e
Параметри
Рис. 5.3. Схема оперативного навчання ШНМ зворотній динаміці
Тут використовується розімкнена схема керування без від’ємного зворотного зв’язку. Перевагами такої схеми є, зазвичай, простота і стійкість. До недоліків можна віднести таке:
– за виконання умови квазістаціонарності ОК дана схема не гарантує, що вихідний сигнал ОК буде відповідати опорному сигналові;
– схема не здатна керувати нестійким об’єктом;
– труднощі виникають, якщо динаміка ОК не має зворотної.
Концепція предикатного керування побудована на керуванні з передбаченням. Рис. 5.4 ілюструє процедуру спеціалізованого навчання ШНМ для послідовної схеми керування.
У цьому разі ШНМ навчається так, щоб отримати найкраще ви-конання рівності y = x.
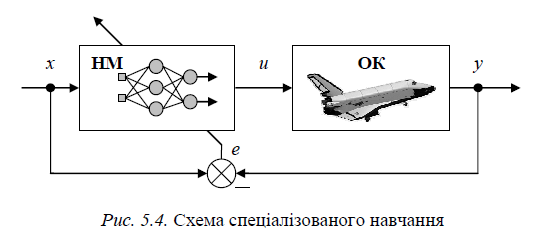
Слід зазначити, що у цьому разі для навчання ШНМ не можна за-стосовувати класичного методу зворотного поширення похибки, оскільки між виходом системи і ШНМ стоїть ОК, якобіан якого в загальному випадку невідомий, і доводиться застосовувати або числову апроксимацію якобіана системи, або інші модернізації методу зворотного поширення, що не потребують інформації про якобіан системи.
Також для цього випадку може застосовуватися навчання ШНМ за допомогою генетичних алгоритмів. Крім цього, система, зображена на рис. 5.4, не може навчатися в оперативному режимі.
Інший підхід полягає у тому, щоб у систему (рис. 5.4) додати ще одну ШНМ (емулятор), який виконує імітаційне моделювання ОК
|
|
|
(рис. 5.5).
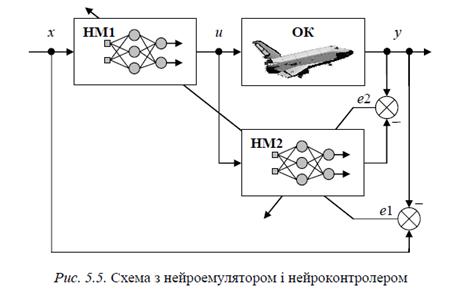
На рис. 5.5 НМ1 виконує функції контролера, а НМ2 – емулятора. При цьому нейроемулятор НМ2 може використовуватись як для визначення якобіана ОК, так і для навчання нейроконтролера НМ1. У цьому випадку ідентифікатор НМ2 настроюється на пряму динаміку об’єкта, а НМ1 настроюється через ідентифікатор НМ2 так, щоб оптимізувати критерій якості керування на визначеному інтервалі часу. Після реалізації керування на даному інтервалі часу процес повторюється. Цей метод також називають «зворотне поширення у часі» або «принцип горизонту, що віддаляється».
Керування з передбаченням, порівняно з інверсійним керуванням, дає кращі результати. Особливо це проявляється у випадку нереалізовності точної зворотної динаміки об’єкта. Разом з тим і обчислювальні витрати для цього методу значно вищі. Розглядувана схема керування, як і попередня, належить до розімкнутих, і за невиконання умови квазістаціонарності об’єкта вона не гарантує, що вихідний сигнал ОК буде відповідати опорному сигналові.
|
|
|
|
|
Дата добавления: 2014-11-16; Просмотров: 420; Нарушение авторских прав?; Мы поможем в написании вашей работы!