КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Следящие системы управления
Основные классификационные признаки
Классификация систем управления.
Общая задача и общее представление схемы системы управления
Схематическое изображение систем
Схематическое изображение элементов или звеньев системы изображают в виде любых геометрических фигур (чаще прямоугольников), связи между данными звеньями изображаются линиями со стрелками, причем стрелка направлена в сторону направления движения сигнала. Система в общем случае условно разделяется на две части:
1. ОУ – объект управления
2. УУ – управляющее устройство
Взаимодействие указанных частей системы представлено на рисунке 4.
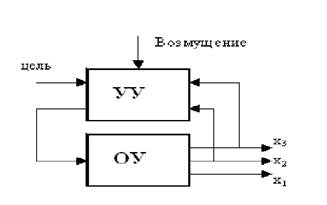
Рис. 4. Схема взаимодействия частей системы.
Х1 – прямые неконтролируемые выходные параметры ОУ
Х2 – прямые контролируемые выходные параметры ОУ
Х3 – косвенные контролируемые выходные параметры ОУ
Выходные параметры системы могут подразделяться на исследуемые и неисследуемые, в свою очередь исследуемые параметры подразделяются на:
- контролируемые параметры,
- неконтролируемые параметры, контроль за которыми может быть затруднен в процессе производства, либо такие выходные параметры имеют значения, которыми в процессе управления системой можно пренебречь.
Нами будут изучаться контролируемые выходные параметры, подразделяющиеся на прямые и косвенные, так как именно от этих параметров зависит устойчивость и качество работы системы.
Прямые выходные параметры описывают непосредственное состояние системы в определенный промежуток времени, косвенные выходные параметры после их измерения могут способствовать более точному регулированию и настройке системы.
Входящие (заданные) параметры, поступающие в управляющее устройство, изменяются с течением времени под действием внешнего возмущения. Задачей автоматического управления является достижение поставленной цели, несмотря на внешнее возмущение, несмотря на меняющиеся параметры состояния системы, возникающие из-за взаимодействия системы с окружающей средой.
Объектами управления могут являться части машин и механизмов, собственно машины и механизмы, производственные линии, технологические процессы, предприятия.
Любой технологический процесс подразумевает под собой совокупность действий, выполняемых по определенным правилам и ограниченный различными критериями.
Процессом управления называется такой процесс действий, который по заданным заранее параметрам приводит к достижению цели.
Целью управления может являться поддержание какого-либо параметра в заданном режиме, т.е. когда контролируемый параметр Xвых = const. Также целью управления может являться изменение выходного параметра системы по заданной программе. В настоящее время программируемые комплексы производят сборку автомобилей, различные технологические операции в агрессивных средах, где непосредственное участие человека небезопасно.
Различают два основных принципа управления: принцип разомкнутого управления и принцип замкнутого управления. Синтез двух указанных принципов дает в результате комбинированное управление.
Принципиальные схемы систем управления могут быть электрическими, пневматическими, гидравлическими, механическими, кинематическими и т.д.
При рассмотрении любого звена системы мы сталкиваемся с рядом физических величин, которые воздействуют на данное звено и называются входными параметрами.
В простом случае звено имеет один входной параметр Xвх. и один выходной параметр Xвых., как изображено на рисунке 5а. В более сложных случаях звено может иметь несколько входных и несколько выходных параметров, причем их число не обязательно должно быть равно друг другу. На рисунке 5б входные параметры изображены, как Xвх1, Xвх2, Xвхm. На выходе данного звена, на рисунке 5б мы имеем выходные параметры Xвых1, Xвых2, Xвыхm, которые характеризуют процессы, протекающие в этом звене.
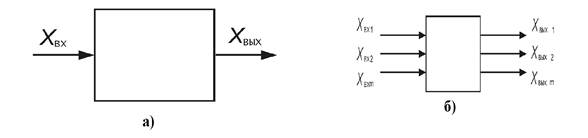
Рис. 5 Параметры звена системы.
а) звено с одним входным и одним выходным параметром
б) звено с множеством входных и выходных параметров
В обычном случае движение сигнала в звене происходит в одном направлении, т.е. входной параметр Xвх. влияет на выходной параметр Xвых., только в системах с обратной
связью выходной параметр Xвых. воздействует на входной параметр Xвх. Структурная схема системы с обратной связью представлена на рисунке 6. Под цифрой 1 на данном рисунке изображено звено, которое может являться сумматором при сложении сигналов, или сравнивающим устройством при вычитании сигналов.
В случае, показанном на рисунке 6, на объект управления (ОУ) поступает управляющий сигнал Xвх., который после прохождения через объект управления принимает значение Xвых. Через обратную связь (ОС) сигнал Xос = Xвх – Xвых поступает на сумматор или сравнивающий элемент, после чего преображается в управляющий сигнал Xвх1, которым задается требуемый параметр управления.
Например, в рассматриваемых в настоящей книге ранее регуляторах Ползунова-Уатта, обратной связью являются рычаги, жестко связанные с заслонками подачи ресурса, которые при увеличении подачи ресурса (воды, пара) регулируют устойчивую работу системы (управляют системой).
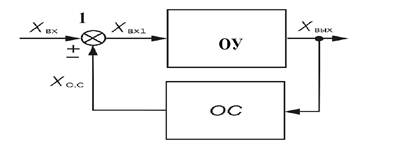
Рис. 6. Схема системы с обратной связью.
ОУ – объект управления, ОС – обратная связь, 1 – сумматор или сравнивающий
элемент, Хвх, Хвх1, Хвых, Хос – входные и выходные параметры
Сумматор или сравнивающий элемент в указанных случаях отсутствуют, т.к. имеет место наличие жесткой обратной связи, а применение вышеуказанных элементов целесообразно при наличии электрических сигналов в управлении системой.
При применении разомкнутого принципа управления на управляющее устройство (УУ) подается входной сигнал X, представляющий собой задание для выполнения поставленной задачи.
Управляющее устройство преобразует входной сигнал X в выходной сигнал U, который в свою очередь подается на объект управления (ОУ). В результате воздействия на объект управления внешнего возмущения Z на выходе объекта управления образуется сигнал Y, который и будет являться решением поставленной задачи. Этот принцип управления является простым для технической реализации, в условиях, когда известны численные характеристики внешнего возмущения, но трудноприменимым, при меняющемся характере возмущения или при стохастическом изменении параметров возмущения.
Структурная схема системы с разомкнутым принципом управления показана на рисунке 7.
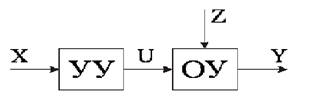
Рис. 7. Структурная схема системы с разомкнутым принципом управления
Принцип компенсации (принцип управления по возмущению) используется в случаях, когда необходимо учитывать характер возмущения при управлении объектом. Структурная схема системы с принципом управления по возмущению изображена на рисунке 8.
При применении принципа компенсации на управляющее устройство (УУ) подается входной сигнал Х, представляющий собой задание для выполнения поставленной задачи. Управляющее устройство преобразует входной сигнал Х в сигнал X1, который подается на корректор (К). Для учета величины параметров внешнего возмущения в структурную схему системы автоматического управления включено устройство, условно называемое - измеритель возмущения (И). Необходимым условием качественного функционирования рассматриваемой системы автоматического управления по принципу разомкнутого управления является наличие заранее известных физических характеристик внешнего возмущения.
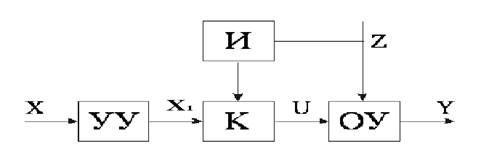
Рис. 8. Схема системы с принципом управления по возмущению.
И – измеритель возмущения, К – корректор,
УУ – управляющее устройство, ОУ – объект управления
В процессе выполнения задачи управления производится замер параметров внешнего возмущения измерителем возмущения (И), сигнал с которого в тот же момент времени поступает на корректор, в результате чего корректором вырабатывается управляющий сигнал U, учитывающий внешнее возмущение. Далее сигнал U подается на вход объекта управления (ОУ). В результате данных операций на выходе объекта управления образуется сигнал Y, который и будет являться решением поставленной задачи. Для того, чтобы принцип компенсации был более эффективен, чем принцип разомкнутого управления необходимо иметь возможность измерения параметров внешнего возмущения, определения характера возмущения.
На основании вышесказанного можно подвести итог, что наиболее удобным в практическом применении является принцип обратной связи, называемый также принципом замкнутого управления, позволяющий учитывать любой характер воздействия внешнего возмущения при решении задачи управления.
Более полная структурная схема системы с принципом замкнутого управления изображена на рисунке 9.
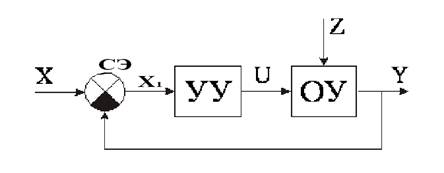
Рис. 9. Схема системы с принципом замкнутого управления.
СЭ – сравнивающий элемент, УУ – управляющее устройство, ОУ – объект
управления
При применении принципа замкнутого управления входной сигнал Х, представляющий собой задание для выполнения поставленной задачи подается на один из входов сравнивающего элемента (СЭ). На другой вход сравнивающего элемента подается по обратной связи значение выходного параметра объекта управления Y. На выходе сравнивающего элемента мы имеем сигнал Х1, представляющий собою разность между сигналами Х и Y, называемый также ошибкой или отклонением между заданным и фактически полученным значением параметров. Управляющий сигнал U вырабатывается управляющим устройством на основании величины и знака отклонения Х1, после чего подается на вход объекта управления с учетом не только задания, но и состояния объекта управления, и величины параметров внешнего возмущения. Исходя из этого, принцип замкнутого управления является наиболее универсальным, несмотря на неопределенность объекта, характера внешнего возмущения и величины параметров возмущения. Примером такого принципа управления является автопилот, который удерживает курс самолета, высоту, скорость, горизонт, в зависимости от заданных параметров (пункта назначения, эшелона), независимо от влажности воздуха, плотности облаков, температуры, скорости и направления ветра и других факторов.
Весь процесс управления может быть условно разбит на 5 этапов, каждый из этапов имеет значение для решения практической задачи управления:
- Выбор цели управления (выбор элемента (звена) системы, к которому будут приложены усилия по управлению всей системой или ее частью)
- Составление задачи управления системой (составление алгоритма управления)
- Расчет задания для задающего устройства (входных параметров)
- Определение ошибки управления (разницы между заданными и фактическими параметрами, зависящими от величины и характера внешнего возмущения)
- Непосредственное решение задачи управления, состоящее в практической реализации функциональных особенностей объекта управления
Согласно указанным этапам процесса управления представим условную общую схему реализации системы управления, изображенную на рисунке 10.
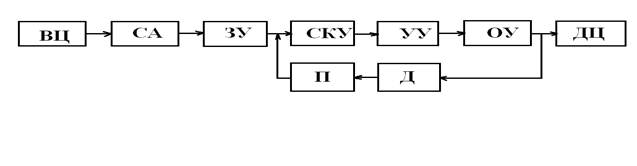 Рис. 10. Условная общая схема реализации системы управления.
Рис. 10. Условная общая схема реализации системы управления.
ВЦ – выбор цели (задачи), СА – составление алгоритма, ЗУ – задающее
устройство, СКУ – сравнивающее корректирующее устройство, УУ –
управляющее устройство, ОУ – объект управления, ДЦ – достижение цели, Д –
датчик, П – преобразователь
В представленной схеме, после выбора цели (ВЦ) и составления алгоритма управления (СА) с задающего устройства (ЗУ) подается сигнал на вход сравнивающего корректирующего устройства (СКУ), на другой вход которого с датчика (Д) через преобразователь (П) подается ошибка отклонения заданного параметра сигнала от фактического. Преобразователь преобразовывает значения величин, поступивших с датчика, в электрические единицы измерения, для сравнения или суммирования их в СКУ.
С выхода СКУ величина входного сигнала, скорректированная с учетом отклонения, подается на управляющее устройство (УУ), которое, в свою очередь преобразовывает сигнал в вид, понятный для объекта управления. В результате на выходе объекта управления, система, реализуя свои возможности, достигает цели (ДЦ), т.е. выполняет поставленную задачу.
Схематическое изображение изменения входных и выходных параметров сигнала в сравнивающем корректирующем устройстве (СКУ) представлено на рисунке 11.
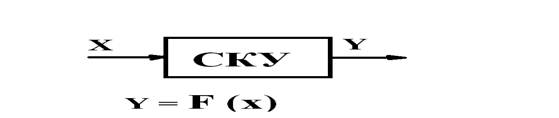
Рис. 11. Схема процесса в СКУ Х – входной сигнал, Y – выходной сигнал
Сравнивающее корректирующее устройство (СКУ) рассчитывает, корректирует и формирует управляющий сигнал в зависимости от функции управления, которой определена зависимость величины выходного сигнала от величины входного сигнала. Данная функция управления обеспечивает работу системы управления в пределах устойчивости.
Современные системы автоматического управления функционируют на основе трех типовых законов управления (регулирования):
- пропорциональный
- интегральный
- дифференцирующий
На базе комбинаций данных законов в современных системах реализованы более сложные алгоритмы, называемые регуляторами, которые описываются уравнениями, представленными ниже, где e(t) – отклонение заданного параметра в зависимости от времени, kп, kд, kи - постоянные коэффициенты, Ти = 1 / kи — постоянная времени интегрирования; Тд = 1 / kд — постоянная времени дифференцирования.
П - регулятор (пропорциональный (статический):
y(t) = kпe(t) (1.1.)
К достоинствам П – регулятора относятся:
а) управляющее воздействие появляется на выходе регулятора в момент появления сигнала ошибки (быстродействие)
б) простота
К недостатку П – регулятора относится:
а) ограниченная точность (особенно при управлении объектами с большой инерционностью и запаздыванием)И – регулятор (интегральный (астатический):
y(t) = kи  e(t) dt (1.2.)
e(t) dt (1.2.)
К достоинству И – регулятора относится:
а) лучшая точность, по сравнению с П – регулятором
К недостаткам И – регулятора относятся:
а) управляющее воздействие появляется с задержкой по времени
б) ухудшается устойчивость системы
ПИ – регулятор (пропорционально-интегральный (изодромный):
y(t) = kпe(t) + (kи/Ти) e(t) dt (1.3.)
К достоинству ПИ – регулятора относится:
а) компенсация недостатков предыдущих регуляторов
К недостатку ПИ – регулятора относится:
а) уменьшенная устойчивость системы
ПД – регулятор (пропорционально-дифференциальный):
y(t) = kпe(t) + kдТи de(t)/dt (1.4.)
К достоинству ПД – регулятора относится:
а) эффект упреждения при регулировании
К недостатку ПД – регулятора относится:
а) невысокая точность при регулировании
ПИД – регулятор (пропорционально-интегрально-дифференциальный):
u(t) = kпe(t) + kдТд de(t)/dt + (kи/Ти) e(t) dt (1.5.)
К достоинству ПИД – регулятора относится:
а) полная компенсация запаздывания
б) сочетание преимуществ предыдущих регуляторов
Системы автоматического управления и системы автоматического регулирования могут классифицироваться по различным признакам. Схема классификации систем приведена на рисунке 12. Различают несколько основных подгрупп классификации:
- по методу управления
- по характеру использования информации
- по результатам работы в установившемся состоянии
- по виду используемой энергии
- по характеру воздействия во времени
- по виду дифференциального управления
Подгруппа систем, различающихся по методу управления, подразделяется на классы неприспосабливающихся (неадаптивных) и приспосабливающихся (адаптивных) систем, в которых класс неприспосабливающихся систем подразделяется на подклассы стабилизирующих, программных и следящих систем, а класс приспосабливающихся систем подразделяется на классы экстремальных и оптимальных систем.
Системы подразделяются на автоматические и автоматизированные.
Автоматические системы работают без участия человека в процессе управления.
Автоматизированные системы работают при частичном участии человека в процессе управления. Данное участие может заключаться в выборе одного решения из множества вариантов.
Неприсбосабливающиеся системы являются одними из самых простых систем автоматического управления, в которых управляющие параметры задаются на основе уже имеющихся данных и обеспечивают устойчивое управление системой с учетом типовых или объективно предполагаемых условий работы.
Стабилизирующие системы – системы, поддерживающие постоянное значение заданного выходного параметра.
Программные системы – системы, обеспечивающие изменение выходного параметра по определенной программе.
Следящие системы – системы, изменяющие выходной параметр в зависимости от внешнего воздействия с заданной на входе точностью, причем значение воздействия изменяется произвольно.
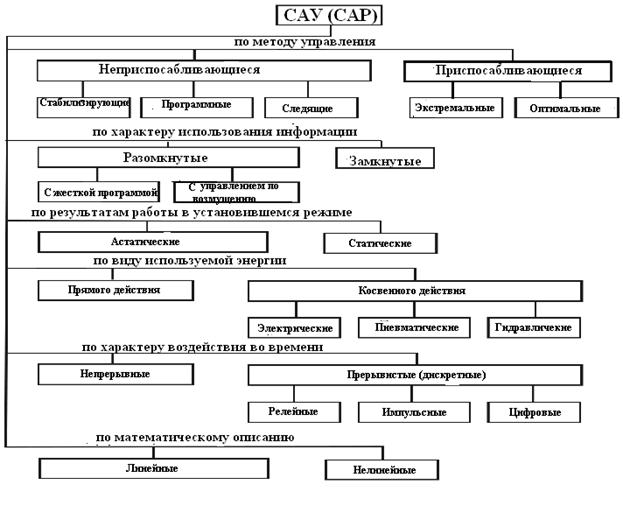
Рис. 12. Классификация САУ и САР
В большинстве систем автоматического управления используется принцип обратной связи, т.е. данные системы являются замкнутыми и управляющие параметры задаются с учетом результата управления.
Положительнаяобратная связь увеличивает значение выходного параметра, отрицательная обратная связь уменьшает значение выходного параметра, по сравнению со значением выходного параметра системы управления без обратной связи. При положительной обратной связи величина параметра обратной связи Хос суммируется с входной величиной Хвх, а при отрицательной обратной связи Хос вычитается из входной величины Хвх. Значит, для входного параметра объекта управления системы с обратной связью, верно равенство:
 Исходя из вышесказанного, величиной входного параметра объекта управления будет являться отклонение регулируемого параметра от его заданной величины U, а выходным параметром Y – управляющий параметр.
Исходя из вышесказанного, величиной входного параметра объекта управления будет являться отклонение регулируемого параметра от его заданной величины U, а выходным параметром Y – управляющий параметр.
В простой замкнутой системе автоматического управления (рисунок 9) на вход сравнивающего корректирующего устройства (СКУ) поступает заданная задающим устройством величина параметра Хвх и измеренное датчиком и преобразованное преобразователем в сигнал значение ошибки (отклонения) управления Хос. Учитывая знак ошибки, (СКУ) корректирует и выдает на выходе (СКУ) параметр U. Величина U поступает на вход объекта управления (ОУ), на выходе которого преобразуется в управляющий параметр Y, с целью придания системе нужного состояния (преодоления отклонения, вызванного внешним возмущением), а значит, в процессе работы системы параметр Y пытается приблизиться к значению Хвх – параметру заданному оператором. Процесс работы такой системы сводится к преодолению отклонения системы от заданного состояния, поэтому такие системы автоматического управления называются системами с регулированием по отклонению. Участие человека заключается в установлении величины параметра задающего устройства, а само решение задачи управления, заключающееся в устранении отклонения фактического значения выходного параметра системы от заданного, выполняется автоматически.
Разомкнутые системы управления применяются в тех случаях, когда известны параметры внешнего возмущения, реакция объекта управления на данное возмущение, имеются типовые схемы и алгоритмы применения разомкнутых систем в нужных
условиях, т.к. применение разомкнутой системы дешевле, чем замкнутой, и они применяются, когда это не влияет на качество выполнения поставленной задачи.
Исполнительные органы систем разомкнутого типа обычно имеют жесткие электромеханические характеристики, встречающиеся, например, у синхронных машин, шаговых двигателей. Кроме замкнутых и разомкнутых систем применяются также комбинированные системы.
Достоинства разомкнутых систем:
- простота
- низкая стоимость
Недостатки разомкнутых систем:
- отсутствует корректировка входного параметра
- не учитывается влияние воздействия случайного внешнего возмущения
- не учитывается состояние системы в процессе работы
По количеству регулируемых параметров системы автоматического управления подразделяются на одномерные и многомерные.
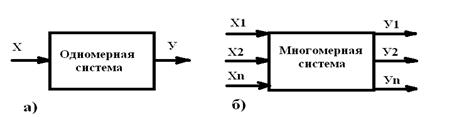
Рис. 13. Структурные схемы: а) одномерной системы, б) многомерной системы
Структурные схемы данных систем представлены на рисунке 13, где Х (Х1, Х2, …, Хn) – величины заданных параметров, У (У1, У2, …, Уn) – величины управляющих параметров.
К одномерным системам можно отнести регуляторы Ползунова, Уатта, т.к. в них регулируется только один параметр, в регуляторе Ползунова – уровень, в регуляторе Уатта – скорость вращения вала.
В настоящее время большинство систем автоматического управления являются многомерными, потому что управляют несколькими параметрами. В многомерных системах могут быть задействованы несколько каналов управления. Каждый параметр характеризуется своим управляющим воздействием, действующим через определенный канал и имеющим свой управляющий элемент, причем каналы и управляющие элементы не взаимодействуют друг с другом и косвенное влияние случайных возмущений, создаваемых каналами, крайне мало, поэтому, обычно не учитывается. Такую многомерную систему можно представить, как множество одномерных систем со своими управляющими элементами.
Однако, многомерные системы также характеризуются наличием связей между управляемыми параметрами. Связи могут быть внутренними и внешними.
Внутренние связи зависят от физических характеристик системы, тогда как внешние – от зависимостей между отдельными управляемыми параметрами.
Системы могут различаться по принципу представления информации на аналоговые (непрерывные) и дискретные. В непрерывных системах входные и управляющие
параметры зависят от времени (непрерывно изменяются с течением времени), т.е. непрерывно с изменением величины входного параметра изменяется и величина управляющего воздействия. В дискретных системах автоматического управления входные и управляющие параметры изменяются с учетом дискретизации, т.е. прерывисто или пошагово, в определенные временные промежутки.
Непрерывные системы подразделяются на линейные и нелинейные, но если в системе из множества звеньев, имеется одно нелинейное звено, то вся система считается нелинейной.
Линейные системы – системы, процессы в которых описываются линейными дифференциальными уравнениями. Из-за сложности описания процессов, происходящих в системах, линейными дифференциальными уравнениями, их линеаризуют, т.е. приводят к линейному виду с помощью определенных ограничений и допусков
Нелинейные системы – системы, процессы в которых описываются нелинейными дифференциальными уравнениями.
Дискретные системы подразделяются на:
- релейные
- импульсные
- цифровые
Релейные системы характеризуются наличием звена (звеньев) с релейной характеристикой, т.е. когда величина выходного параметра данного звена изменяется скачкообразно при определенной величине входного параметра.
Импульсные системы характеризуются наличием звена (звеньев) с импульсной характеристикой, т.е. когда при непрерывном изменении величины входного параметра, величина выходного параметра изменяется только в определенные промежутки времени.
Цифровые системы характеризуются наличием цифровых устройств, в которых сигналы (входные и выходные параметры) являются дискретизированными по уровню и по времени.
Различают системы с сосредоточенными и системы с распределенными параметрами.
Системами с сосредоточенными параметрами называются системы, характеризующиеся величиной управляемого параметра в одной точке пространства, в которых величина управляемого параметра является только временной функцией.
Системами с распределенными параметрами называются системы, характеризующиеся величиной управляемого параметра в нескольких точках пространства.
Следящие системы изменяют выходной параметр в зависимости от внешнего возмущения с заданной на входе точностью, причем возмущение изменяется произвольно.
Структурная схема следящей системы представлена на рисунке 14.

Рис. 14. Структурная схема следящей системы.
ЗУ – задающее устройство, ДЗУ – датчик задающего устройства,
УУ – управляющее устройство, ОУ – объект управления,
ДОУ – датчик объекта управления
С задающего устройства (ЗУ) сигнал поступает на датчик (ДЗУ), который вырабатывает параметры желаемого состояния объекта управления (ОУ). На основании данных о состоянии объекта управления, поступающих на управляющее устройство (УУ) с датчика объекта управления (ДОУ) и сравнения их с данными, поступающими с датчика (ДЗУ) управляющее устройство корректирует управляемые параметры объекта управления и приводит их в желаемое состояние.
|
|
Дата добавления: 2014-11-16; Просмотров: 6269; Нарушение авторских прав?; Мы поможем в написании вашей работы!