КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип действия элементов системы холостого хода
|
|
|
|
3.1 Cервопривод регулятора оборотов холостого хода (ISC)
(а) Устройство
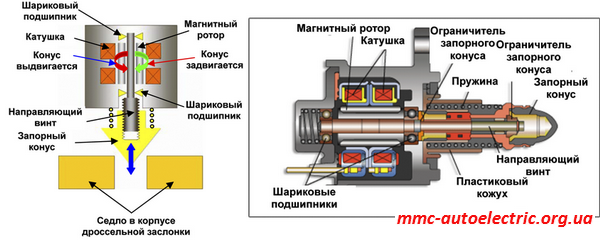
Регулятор холостого хода представляет собой узел, монтируемый на корпусе дроссельной заслонки. Он состоит их шагового электродвигателя и запорного конуса с винтовой подачей. Управляющие импульсы с электронного блока приводят во вращение ротор шагового электродвигателя, в результате чего запорный конус линейно перемещается и изменяет расход воздуха через байпасный канал.
3.2 Количество воздуха, проходящего через байпасный канал и количество импульсов (шагов) шагового электродвигателя
Шаговый электродвигатель сконструирован таким образом, что при подаче на него одного импульса управления он перемещается на один шаг, который составляет 15°. Ротор шагового двигателя может вращаться в прямом и обратном направлении (электродвигатель реверсивного типа) на угол соответствующий числу подаваемых на электродвигатель импульсов (или на определенное количество шагов).
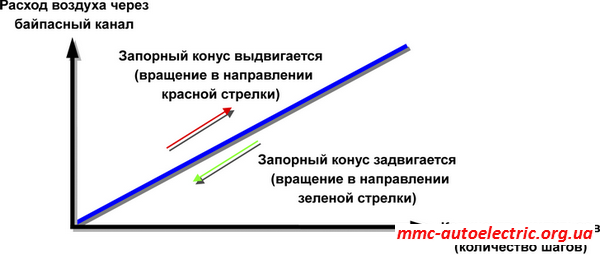
Запирающий конус вместе с направляющим винтом и валом магнитного ротора составляют одно целое. Когда вал шагового электродвигателя вращается по часовой стрелке (в направлении зелёной стрелки - рис. 4.25), направляющий винт вместе с запорным конусом убирается внутрь корпуса электродвигателя, увеличивая зазор между запирающим конусом и седлом клапана и, следовательно, расход воздуха через байпасный канал. При вращении против часовой стрелки (в направлении красной стрелки), направляющий винт вместе с запирающим конусом выдвигаются из корпуса электродвигателя, уменьшая зазор между запирающим конусом и седлом клапана и, следовательно, расход воздуха через байпасный канал.
Другими словами, расход воздуха через байпасный канал увеличивается или уменьшается пропорционально количеству импульсов (числу шагов).
|
|
|
3.3 Принцип действия шагового электродвигателя (STM)

Шаговый электродвигатель состоит из двух статоров и составного ротора. На наружных поверхностях ротора и внутренних поверхностях статоров имеются зубья. На роторе расположены постоянные магниты.
На рис. 4.26 показана схема шагового электродвигателя с углом шага 15°. Статор имеет 12 зубьев и три фазовые обмотки (А, В и С). Ротор имеет 8 зубьев.
В положении, которое показано на рис.4.26 ток подаётся на обмотки фазы А. Намагниченные катушки фазы А притягивают соответствующие зубья ротора, удерживая его в неподвижном положении. Если переключить подачу питания с обмоток фазы А на обмотки фазы В, то положение оси магнитного поля создаваемого статором изменится (оно повернётся на 30º против часовой стрелки с NA–SA на NB–SB). Возникшая электромагнитная сила притяжения между намагниченным катушками фазы В и ближайшими зубьями ротора приведет к его повороту на угол 15° по часовой стрелке.
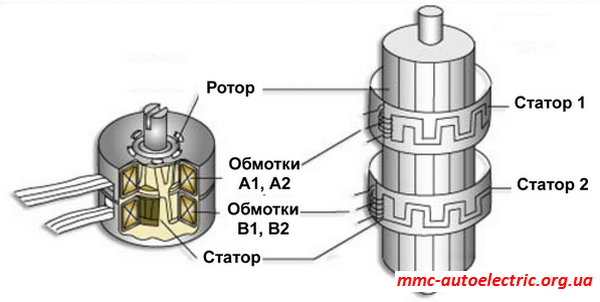
Устройство реальной конструкции шагового электродвигателя показано на рис.4.27. Он состоит из двух статоров, каждый из которых содержит по две обмотки (А1, А2, В1, В2). Обмотки выполнены таким образом, что если ток протекает через обмотки А1(В1), то верхние части статоров становятся магнитными полюсами N, а их нижние части полюсами S. При протекании тока через обмотки А2(В2) полюса меняются местами.

ШАГ 0 При протекании тока через обмотки А1 и В1 верхние части статоров становятся магнитными полюсами N, а их нижние части полюсами S и соответственно притягивают полюса S и N магнитного ротора и удерживают его неподвижно.
ШАГ 1 При отключении обмотки А1 и подключении обмотки А2 нижняя часть статора 1 становится полюсом N. Этот полюс перемещается по статору вправо от исходного положения. В результате S-полюс ротора притягивается, и ротор поворачивается вправо на шаг.
ШАГ 2 При отключении обмотки В1 и подключении обмотки В2 нижняя часть статора 2 становится полюсом N. Этот полюс перемещается по статору вправо от исходного положения. Как и в предыдущем случае S-полюс ротора притягивается, и ротор поворачивается вправо на шаг.
|
|
|
|
|
|
|
|
Дата добавления: 2014-11-16; Просмотров: 530; Нарушение авторских прав?; Мы поможем в написании вашей работы!