КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Плоскопараллельное движение твёрдого тела
3.1 Определение. Примеры. Уравнения движения
Плоскопараллельным (плоским) называется такое движение твёрдого тела, при котором все его точки перемещаются параллельно некоторой фиксированной плоскости.
Плоские движения совершают многие части механизмов и машин, например:
 |
 1) катящееся колесо на прямолинейном участке пути:
1) катящееся колесо на прямолинейном участке пути:
А 
2) шатун АВ в кривошипно- шатунном механизме О В
3) звено АВ в спарнике  А В
А В
О1 О2
Частным случаем плоскопараллельного движения является вращательное движение твёрдого тела вокруг неподвижной оси.
Рассмотрим сечение S тела плоскостью OXY, параллельной неподвижной плоскости П (рисунок 3.1). При плоскопараллельном движении все точки тела, лежащие на прямой АВ, перпендикулярной сечению S, т.е. плоскости П, движутся тождественно.
 А У
А У
S
О Х
|
В
Рисунок 3.1
Таким образом, для изучения движения всего тела достаточно изучить движение плоской фигуры S, поэтому в дальнейшем вместо плоского движения тела будем рассматривать движение плоской фигуры S в её плоскости, т.е в плоскости ОХУ.
Положение плоской фигуры S в плоскости OXY определяется положением какого-нибудь проведённого на этой фигуре отрезка АВ (рисунок 3.2), а положение этого отрезка можно определить, зная координаты XA и YA точки А и угол j, который отрезок АВ образует с осью Х. Точку А, выбранную для определения положения фигуры S, называют полюсом.
 |
yА
O xА x
Рисунок 3.2
При движении фигуры величины ХА, УА, j будут изменяться. Чтобы знать закон движения фигуры S, т.е. её положение в любой момент времени в плоскости ОХУ, надо знать зависимости:
xА=f1(t); yА=f2(t); j=f3(t). (3.1)
Уравнения (3.1) являются уравнениями движения плоской фигуры в её плоскости или уравнениями плоскопараллельного движения тела.
3.2 Разложение плоского движения твёрдого тела на простые.
Кинематические характеристики
Рассмотрим движение плоской фигуры (рисунок 3.3); например два её положения – I и II, определяемые положениями отрезка АВ.
Перемещение плоской фигуры из I в II можно заменить двумя простыми плоскими перемещениями - поступательным и вращательным, которые можно выполнять по отдельности или одновременно.
 y В2 В1
y В2 В1


1 2
 |
А А1
I II
 0 x
0 x
Рисунок 3.3
Таким образом, плоскопараллельное движение фигуры представляет собой совокупность двух движений, происходящих одновременно: поступательного движения всех точек фигуры вместе с полюсом (например: точка А) и вращательного движения всех точек фигуры вокруг полюса.
Исходя из уравнения (3.1) кинематическими характеристиками плоского движения являются скорость и ускорение поступательного движения, равные скорости и ускорению полюса (
 ), а также угловая скорость w и угловое ускорение x вращательного движения вокруг полюса.
), а также угловая скорость w и угловое ускорение x вращательного движения вокруг полюса.
Если за полюс выбрать любую другую точку фигуры, то кинематические характеристики поступательного движения изменяются, а кинематические характеристики вращательного движения останутся неизменными, т.е. вращательная часть плоского движения от выбора полюса не зависит.
3.3 Векторная формула для вычисления скоростей точек плоской фигуры
В п. 3.2 было показано, что движение плоской фигуры можно рассматривать как слагающееся из поступательного движения, при котором все точки фигуры движутся со скоростью полюса – Va и из вращательного движения всех точек фигуры вокруг этого полюса.
Покажем, что скорость любой точки В плоской фигуры складывается геометрически из скоростей, которые точка приобретает в каждом из этих движений.
Рассмотрим плоскую фигуру, свяжем радиусами-векторами точки А и В этой фигуры с осями ОХУ:


 y
y 
 В
В 
VA

|
rA
Рисунок 3.4
 – радиус-вектор полюса А;
– радиус-вектор полюса А;
 – радиус-вектор произвольной точки В.
– радиус-вектор произвольной точки В.
 – вектор, определяющий положение точки В относительно осей AX1Y1, перемещающихся вместе с полюсом А поступательно.
– вектор, определяющий положение точки В относительно осей AX1Y1, перемещающихся вместе с полюсом А поступательно.  , т.к. фигура твёрдая, тогда
, т.к. фигура твёрдая, тогда  , продифференцировав по времени, получим
, продифференцировав по времени, получим
 или
или  , (3.2)
, (3.2)
где  – это скорость, которую приобретает точка В при вращении фигуры вокруг полюса А, поэтому
– это скорость, которую приобретает точка В при вращении фигуры вокруг полюса А, поэтому
VВА=wAB, (3.2 / )
 , где w – угловая скорость фигуры.
, где w – угловая скорость фигуры.
Таким образом, скорость произвольной точки В плоской фигуры геометрически складывается из скорости какой-либо другой точки А, принятой за полюс, и скорости, которую точка В получает при вращении фигуры вокруг этого полюса; т.е.
 . (3.3)
. (3.3)
В выражении (3.2) присутствуют кинематические характеристики как поступательного, так и вращательного движений, что ещё раз подчеркивает, что плоское движение – это сложное движение, являющееся совокупностью поступательного и вращательного движений.
Модуль и направление  определяются построением соответствующего параллелограмма (рисунок 3.5).
определяются построением соответствующего параллелограмма (рисунок 3.5).
Рассмотрим, например, колесо, катящееся по прямолинейному отрезку пути без скольжения; центр колеса точка С имеет скорость  . Выберем две произвольные точки В и D на ободе колеса и, используя выражение (3.3), запишем их скорости:
. Выберем две произвольные точки В и D на ободе колеса и, используя выражение (3.3), запишем их скорости:
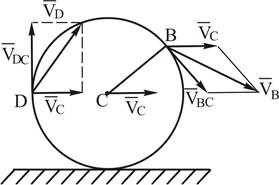
Рисунок 3.5
 ;
;  ;
;
 . (3.4)
. (3.4)
Чтобы вычислить численные значения скоростей точек В и D, используют теорему косинусов, для чего необходимо знать углы между векторами  и
и  ;
;  и
и  .
.
3.4 Векторная формула для вычисления ускорения точек плоской фигуры
Покажем, что ускорение любой точки В плоской фигуры (так же как и скорость) складывается из ускорений, которые точка получает при поступательном и вращательном движениях этой фигуры.
Рассмотрим плоскую фигуру с полюсом в точке А.
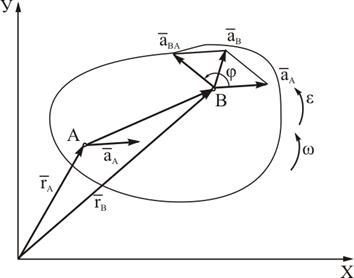
Рисунок 3.6
Продифференцируем дважды по времени (3.2) и получим:
 или
или 
 (3.5)
(3.5)
или  ,
,
где  ;
;  ; (3.6)
; (3.6)
или  (3.5 /)
(3.5 /)
Таким образом, ускорение произвольной точки плоской фигуры В геометрически складывается из ускорения полюса  и ускорения, которое точка В получает при вращении фигуры вокруг этого полюса.
и ускорения, которое точка В получает при вращении фигуры вокруг этого полюса.
Модуль и ускорение  находятся построением соответствующего параллелограмма (рисунок 3.6).
находятся построением соответствующего параллелограмма (рисунок 3.6).
Однако вычисление с помощью параллелограмма изображённого на рисунке 3.6, осложняется нахождением угла φ между векторами  и
и  , поэтому
, поэтому  удобнее заменять его касательной (
удобнее заменять его касательной ( ) и нормальной (
) и нормальной ( ) составляющими, (3.6).
) составляющими, (3.6).
Следует отметить, что совпадает по направлению с x и 
 , а и направлен от точки В к точке А, величины их вычисляются по формулам:
, а и направлен от точки В к точке А, величины их вычисляются по формулам:
=АВx; =АВw2. См. рисунок 3.7.
Если полюс А движется не прямолинейно, то его ускорение можно тоже представить как сумму касательной и нормальной составляющей, тогда можно записать:
 (3.7)
(3.7)
Формулы 3.5–3.7 обычно используют при решении задач.
|
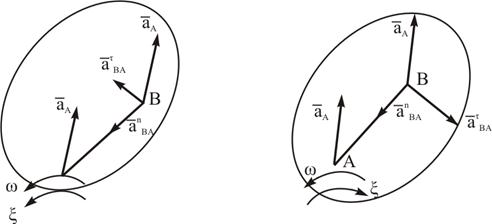
Рисунок 3.7
3.5 Определение скоростей точек плоской фигуры с помощью мгновенного
центра скоростей (М.Ц.С)
Другой более простой и наглядный метод определения скоростей точек тела при плоском движении основан на понятии о мгновенном центре скоростей.
М.ц.с- это такая точка в плоскости плоской фигуры, скорость которой в данный момент времени равна нулю. Обозначают её Р. В данный момент времени это единственная точка, скорость, которой равна нулю.
Способы определения м.ц.с:
1) если плоскопараллельное движение осуществляется путём качения без скольжения цилиндрического тела по какой-либо неподвижной поверхности, то точка соприкосновения катящегося тела с поверхностью имеет скорость, равную нулю, следовательно, является м.ц.с. Примером служит качение колеса по рельсу.
 w
w
с 
 |
|
|
Дата добавления: 2014-11-08; Просмотров: 937; Нарушение авторских прав?; Мы поможем в написании вашей работы!