КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамический анализ механизмов и машин
|
|
|
|
Кинематический анализ механизмов
Задачи и методы кинематического анализа.
Кинематический анализ рычажных механизмов:
- аналитический метод преобразования координат;
- аналитический метод замкнутого векторного контура;
- графоаналитический метод с построением планов скоростей и ускорений;
- графический метод с применением графического дифференцирования (интегрирования).
Кинематический анализ зубчатых механизмов:
- аналитический метод;
- графический метод - путем построения планов линейных и угловых скоростей.
Основные задачи динамического исследования механизмов.
Силы, действующие на звенья механизма.
Силовой анализ плоских рычажных механизмов.
- основные задачи силового анализа;
- статическая определимость структурных групп;
- порядок и методика силового анализа механизмов: разложение на структурные группы, применение принципа Даламбера, применение метода планов сил;
- определение уравновешивающей силы методом Н.Е. Жуковского.
Анализ движения плоских рычажных механизмов:
- задачи анализа движения механизмов;
- метод приведения сил (моментов сил), масс (моментов инерции);
- формы записи уравнений движения механизмов (дифференциальная форма записи, уравнения в форме кинетической энергии, уравнения Лагранжа 2 - го рода);
- режимы движения механизмов. Основные характеристики установившегося движения. Неравномерность движения машины;
- определение закона движения звена приведения и коэффициента неравномерности движения аналитическими методами (по п.3.4.3.) и графоаналитическим методом Виттенбауэра;
- определение потребного момента инерции маховика;
- силы трения в механизмах. Влияние сил трения на работу механизма.
|
|
|
Основы «Сопротивления материалов»
Основные понятия и определения. Задачи проектного и проверочного расчетов. Прочность, жесткость, устойчивость. Классификация внешних силовых факторов. Напряжения. Деформация и ее виды. Механические характеристики конструкционных материалов.
Диаграммы деформирования. Закон Гука при растяжении и при сдвиге. Коэффициент запаса прочности и допускаемые напряжения. Понятие о напряженном и деформированном состояниях. Потенциальная энергия деформации (Формоизменения). Растяжение и сжатие прямого стержня. Одноосное (линейное) напряженное состояние. Продольные и поперечные деформации. Коэффициент Пуассона (поперечной деформации). Модуль упругости. Кручение стержня круглого поперечного сечения. Закон парности касательных напряжений. Модуль сдвига. Изгиб. Напряжения при чистом изгибе. Геометрические характеристики плоских сечений. Напряженное состояние в точке. Главные площадки и главные напряжения. Сложное сопротивление. Предельное состояние и его критерии. Теории (гипотезы) прочности (пластичности). Устойчивость. Критическая сила. Формула Эйлера. Сопротивление материалов при переменных во времени нагрузках. Явление механической усталости. Эффект концентрации напряжений. Кривые Велера и предел выносливости.
Основы «Детали машин»
Основные критерии работоспособности и расчетов деталей машин. Этапы проектирования и создания машин.
Механические передачи. Общие сведения. Классификация. Понятие о механическом приводе. Передачи типа «винт-гайка». Область применения. КПД. Расчет передач типа «винт- гайка». Передачи вращательного движения. Передаточное отношение. Редукторы и мультипликаторы. Зубчатые передачи. Классификация. Прямозубые и косозубые цилиндрические, конические зубчатые передачи. Основные геометрические соотношения. Условия в зацеплении. КПД. Расчет на прочность. Тепловой расчет. Передачи гибкой связью.
|
|
|
Устройства, обеспечивающие работу передач. Валы и оси. Общие сведения, типы конструктивного исполнения. Построение расчетных схем. Расчет осей. Расчет валов передач на выносливость. Опоры. Подшипники и направляющие. Подшипники скольжения. Область применения, материалы, смазывание, виды разрушения и критерии работоспособности. Расчет на износо- и теплостойкость. КПД. Подшипники качения. Классификация, условные обозначения и основные типы. Подбор подшипников и определение их ресурса. Смазывание. Муфты. Классификация, область применения, конструктивные особенности различных типов муфт.
Соединения. Общие сведения. Классификация. Неразъемные соединения. Сварные соединения. Расчет основных типов сварных швов. Соединения типа «вал-ступица». Шпоночные и шлицевые соединения. Типы стандартных шпонок. Расчет соединений сегментными и призматическими шпонками. Классификация и проверочный расчет шлицевых соединений. Разъемные соединения. Резьбовые соединения. Классификация и геометрические параметры резьб. Способы стопорения резьбовых соединений. Силовые соотношения в винтовых парах. Самоторможение резьбы. Коэффициент полезного действия (КПД) винтовой пары. Расчет резьбовых соединений на прочность.
Содержание заданий, выбор вариантов.
В контрольную работу входит четыре задачи:
Задача №1 – на тему кинематический анализ плоского рычажного механизма,
Задача №2 – кручение;
Задача №3 – плоский изгиб;
Задача №4 - расчетно-графическая работа - разработка привода технологической машины
Во всех задачах студент выбирает номер рисунка по последней цифре учебного шифра, номер условия в таблице – по предпоследней цифре шифра.
Задача №1
Кривошип АВ плоского рычажного механизма, изображенного на рис.1.0 - 1.9, вращается с постоянной угловой скоростью nAB (об/мин.). Выполнить:
структурный анализ механизма;
построить план положений и определить траекторию движения точки Е;
для заданного значения угла поворота кривошипа - j0, построить план скоростей и ускорений звена ВС, а так же определить скорость точки F и угловую скорость звена CD.
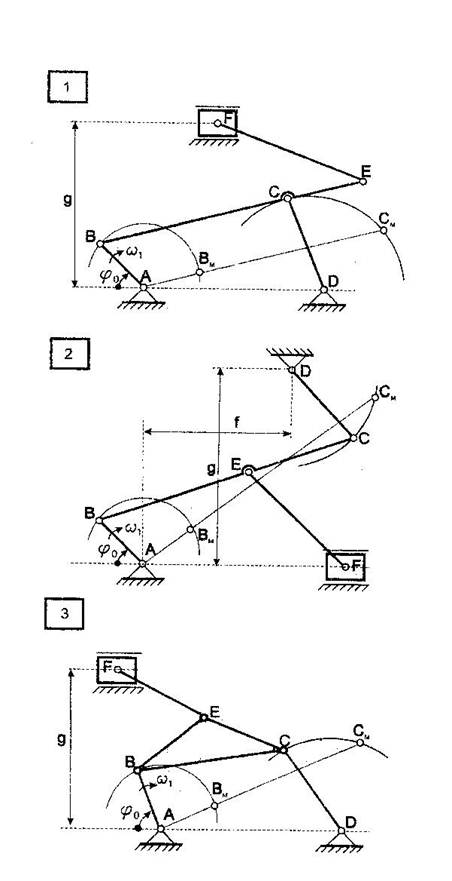
Рис. 1.1-1.3
|
|
|

Рис. 1.4-1.6
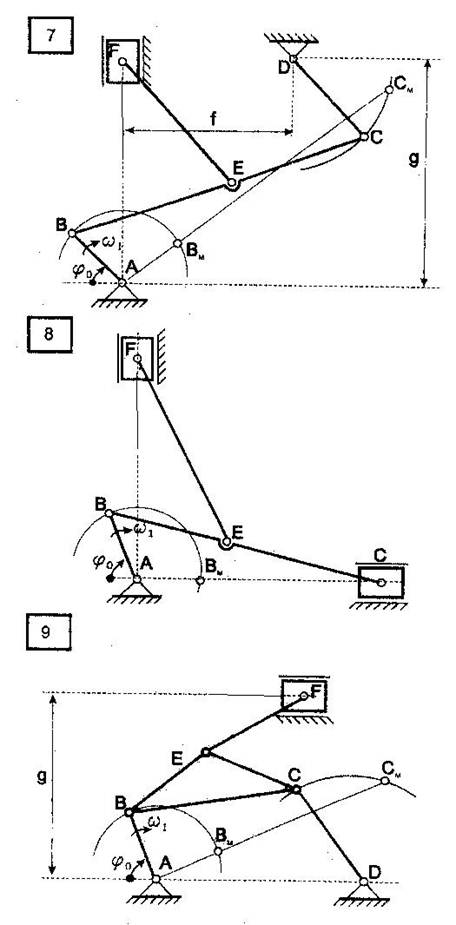
Рис. 1.7-1.9
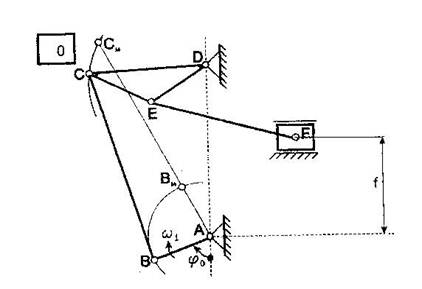
Рис. 1.0
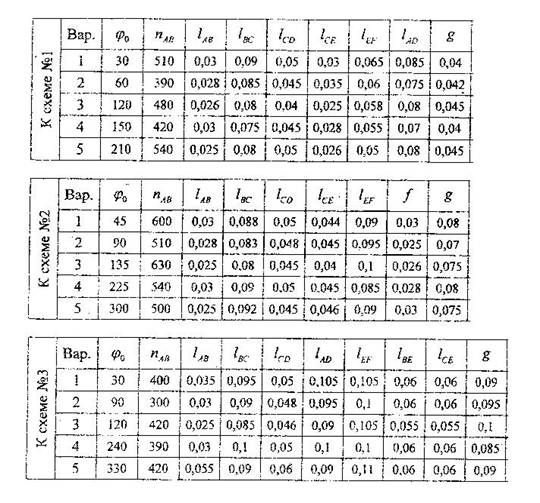
Табл. 1.1-1.3

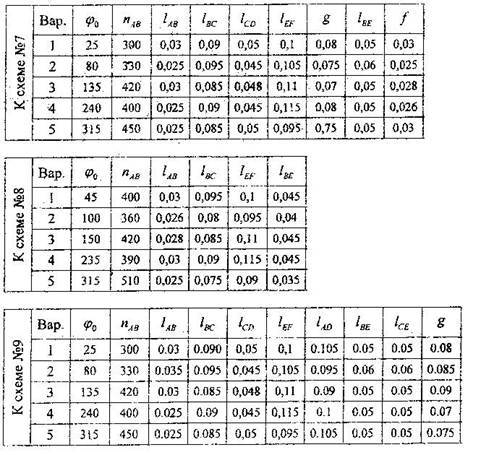
Табл. 1.4-1.9
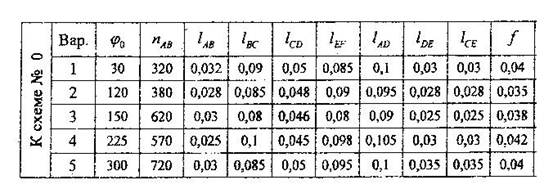
Табл. 1.0
Методические рекомендации к выполнению задачи №1
Структурный анализ механизмов
При структурном анализе определяют тип структурной схемы, число звеньев, число и класс кинематических пар, число степеней свободы механизма, структурные группы, их класс и порядок.
Рекомендуемый порядок определения структурных характеристик
Установить тип структурной схемы рычажного механизма.
Определить число звеньев механизма, число и класс кинематических пар.
Определить число степеней свободы рычажного механизма.
Выделить структурные группы, установить их класс и порядок.
Кинематический анализ рычажного механизма
При кинематическом исследовании механизма определяют положение, скорость, ускорение его звеньев и их характерных точек. При выполнении РГР рекомендуется использовать графоаналитический и графический методы исследования.
Рекомендуемый порядок кинематического анализа рычажного механизма.
1. Построить 6 планов положения механизма (при общем изображении стойки) при равно отстоящих положениях входного звена. За начальное принять положение входного звена, соответствующее началу рабочего хода машины. При рабочем ходе точка Е выходного звена №3 движется из левого крайнего положения в правое крайнее положение.
На плане положений механизма построить траекторию точки Е.
2. Для одного положения механизма, соответствующего рабочему ходу, построить план скоростей. Номер положения механизма принять самостоятельно. На плане показать векторы скоростей всех точек, обозначенных на плане механизма буквами. Определить значения скоростей точек.
3. Построить план ускорений механизма при том же положении механизма. Показать векторы ускорений точек, указанных в п.3.2. Определить значения ускорений точек.
4. По планам скоростей и ускорений определить направления и значения угловых скоростей и угловых ускорений звеньев механизма.
5. Построить диаграмму перемещений точки Е звена 3 в функции угла поворота входного звена 1.
|
|
|
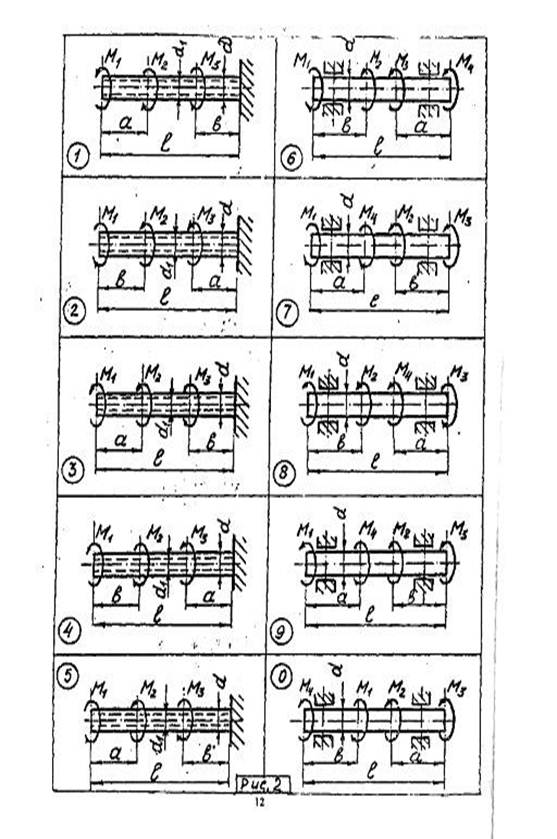
Задача №2
Для заданной схемы нагружения круглого вала (рис. 2)
- построить эпюры крутящих моментов,
- найти опасное сечение,
- определить диаметры вала, внутренний и наружный по
заданному их соотношению, τ=(0,6...0,7)[σ];
- определить углы закручивания на участках вала;
- определить диаметры вала на условия жесткости [θ] =1 град/м;
- определить диаметр вала, считая его сечение сплошным;
- определить экономию материала, сравнив веса вала сплошного
и кольцевого сечений.
Данные для решения задачи приведены в таблице 2. [σ] даны в таблице 1.
Таблица 2
| № п/п | Вари-ант схемы | l, m | a, m | b,m | M1,kHм | M2,kHм | M3,kHм | с=d/D |
| 0,8 | 0,6 | 2,0 | 4,0 | 3,0 | 0,7 | |||
| 3,0 | 6,0 | 4,0 | 0,75 | |||||
| 4,0 | 5,0 | 6,0 | 0,8 | |||||
| 1,6 | 5,0 | 7,0 | 8,0 | 0,6 | ||||
| 6,0 | 8,0 | 10,0 | 0,5 | |||||
| 2,4 | 0,8 | 7,0 | 9,0 | 10,0 | 0,75 | |||
| 2,8 | 1,0 | 0,8 | 7,2 | 10,0 | 9,0 | 0,8 | ||
| 4,2 | 1,2 | 2,5 | 8,0 | 4,0 | 6,0 | 0,6 | ||
| 3,6 | 1,2 | 4,0 | 6,0 | 10,0 | 0,5 | |||
| 4,8 | 1,2 | 5,0 | 7,0 | 12,0 | 0,8 |
Примечание: в схемах 6…0 М4=åМi = M1+M2+M3
|
|
|
|
|
Дата добавления: 2014-12-08; Просмотров: 2287; Нарушение авторских прав?; Мы поможем в написании вашей работы!