КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Интерфейсы ввода-вывода
|
|
|
|
В процессе функционирования МПС возникает необходимость приема в него данных от различных устройств ввода. Принятые данные подвергаются обработке. Полученные в результате обработки данные выводятся из МПС и передаются в различные устройства вывода. В качестве таких устройств ввода и вывода, называемых периферийными (ПУ), могут использоваться телетайпы, дисплеи, аналого-цифровые и цифроаналоговые преобразователи информации, линии связи и т.п. Очевидно, для обеспечения такого обмена данными требуются определенные средства — система команд, сигналов и соответствующие устройства сопряжения. Эти средства объединяются под наименованием интерфейс ввода-вывода.
Рассмотрим способы обмена данными. Обмен данными между МПС и ПУ может либо быть программно-управляемым, либо осуществляться способом прямого доступа к памяти (ПДП). При программно-управляемом вводе микропроцессор в ходе выполнения соответствующей программы ввода побайтно принимает данные От ПУ через шину данных в аккумулятор. Прежде чем принимать очередной байт информации микропроцессор пересылает содержимое аккумулятора в ОП. Аналогично при выводе данных из ОП в ПУ байты данных принимаются из ОП в аккумулятор микропроцессора, затем из аккумулятора они выдаются на шину данных, откуда принимаются в соответствующее ПУ.
Большая скорость обмена данными между ОП и ПУ может быть обеспечена в режиме прямого доступа к памяти. В этом режиме микропроцессор отключается от шин адреса и данных (переходя в состояние Захват) и не принимает участия в процессе обмена. Обмен между ОП и ПУ осуществляется непосредственно.
Рассмотрим подробнее принципы программно-управляемой передачи данных.
|
|
|
Синхронная передача. Синхронная передача предполагает, что при каждом выполнении встречающихся в программе команд обмена Вв и Выв ПУ готово к выдаче на шину данных запрашиваемого микропроцессором байта или к приему с шины данных байта, выданного на эту шину микропроцессором.
Асинхронная передача. При асинхронной передаче, прежде чем производить обмен данными, микропроцессор выясняет готовность ПУ к такому обмену. Приведенная на рис. схема алгоритма иллюстрирует этот процесс. Микропроцессор получает из ПУ информацию о состоянии; анализируя ее, он выясняет готовность ПУ к обмену; если ПУ не готово к обмену, то микропроцессор повторяет чтение состояния ПУ; если ПУ готово к обмену, то осуществляется передача данных между микропроцессором и ПУ.
Передача данных с прерыванием программы. В рассмотренных случаях обмен данными инициировался микропроцессором. Встречаются задачи, в которых обмен должен осуществляться в произвольных точках программы в моменты, определяемые периферийным устройством. При выполнении такого вида обмена данными по запросу, поступившему из ПУ, производится прерывание выполняемой микропроцессором программы и переход к выполнению специальной программы обмена.
В МПК серии 580 имеются микросхемы, предназначенные для построения интерфейса ПУ; одной из таких микросхем является программируемый параллельный интерфейс КР580ВВ55, описание которого приводится ниже.
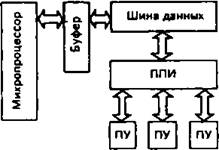
Программируемый параллельный интерфейс. На рис. приведена упрощенная структурная схема программируемого параллельного интерфейса (ППИ).
С помощью ППИ осуществляется обмен Данными (рис.5.24) между микропроцессором (МП) и различными ПУ. Для подключения ППИ к шине данных (ШД) микропроцессорной системы в ППИ предусмотрен 8-разрядный канал данных (КД). Периферийные устройст- ва могут подключаться к 8-разрядным каналам ППИ: КА, KB, КС. Канал КС состоит из двух 4-разрядных подканалов КС1 и КС2. Каналы КА, KB, КС снабжены регистрами. В канале КА предусмотрено два регистра, один из них используется для приема данных, поступающих из ШД МПС, и выдачи их к ПУ, другой — для приема данных, поступающих от ПУ, и выдачи их на шину данных МПС. В каналах KB, КС1 и КС2 имеется по одному регистру, который обеспечивает передачу данных между МП и ПУ в требуемом направлении. Все каналы снабжены буферными устройствами (входными и выходными формирователями с тремя состояниями), через которые осуществляется связь ППИ с внешними шинами.
|
|
|
Таким образом, обмен между МП и ППИ распадается на две фазы обмена: обмен между регистром выбранного канала ППИ (регистром каналов КА, KB, КС) и НТД МПС и обмен между регистрами каналов ППИ и ПУ. Рассмотрим, как организуется каждая из этих фаз обмена.
Обмен между ШД МПС и регистром ППИ организуется под управлением сигналов, подаваемых на входы устройства управления (УУ) ППИ. Аф, Aj — содержимое двух младших разрядов шины адреса (ША) МПС, ВК — сигнал выборки микросхемы. В качестве последнего сигнала в системах с малым числом интерфейсных устройств может быть выбрано содержимое одного из шести старших разрядов шины адреса, в системах с большим числом интерфейсных устройств этот сигнал формируется дешифратором шести старших разрядов адреса. Вв и Выв — сигналы, формируемые в цепях управления МПС (системные управляющие сигналы на выходах микросхемы системного контроллера КР580ВК28). В табл. по Рис. показаны виды обмена данными между ШД и регистрами ППИ и соответствующие им наборы значений сигналов выборки.
 |
По командам микропроцессора IN (ввод данных) и OUT (вывод данных) буферы канала КД обеспечивают обмен данными между ШД МПС и внутренней магистралью данных ППИ. Принятая с ШД МПС на внутреннюю магистраль данных ППИ информация представляет собой либо данные, которые через внутреннюю магистраль принимаются в регистр одного из каналов для дальнейшей их выдачи к ПУ, подключенному к этому каналу, либо так называемое управляющее слово. Управляющее слово (УС) принимается в регистр управляющего слова (РУС) и организует обмен данными между регистрами каналов ППИ и ПУ. С помощью УС производится установка ППИ в один из режимов работы (называемых режимами 0, 1, 2) для выполнения каналами определенных функций и задается направление передачи. На рис. представлен формат управляющего слова.
|
|
|
При поступлении из шины управления МПС сигнала Сброс все канальные регистры сбрасываются в нулевое состояние, а в РУС заносится информация, при которой все каналы устанавливаются на прием в режиме 0 (при этом выходные формирователи каналов оказываются в третьем — выключенном — состоянии).
Опишем функционирование каналов в отдельных режимах работы.
Режим 0. В этом режиме любой из каналов КА, KB, КС1 и КС2 может быть установлен на ввод или вывод информации. При этом, если производится ввод информации, то регистр канала (в канале КА — входной регистр) непрерывно следит за всеми изменениями информации на входе канала; если осуществляется вывод информации, то содержимое регистра канала (в канале КА — выходного регистра) непрерывно передается на выход канала. Сигналы управления (квитирования) в этом режиме не формируются.
Режим 1. В этом режиме передача данных может производиться через каналы КА и KB, а канал КС используется в основном для приема и выдачи сигналов управления.
Если канал KB установлен на ввод информации, периферийное устройство одновременно с подачей данных в канал KB подает в ППИ через разряд 2 канала КС лог.О, сигнализируя о выдаче информации. При этом через разряд 1 канала КС периферийное устройство получает от ППИ сигнал (лог. 1) подтверждения приема выданных периферийным устройством данных.
В случае установки канала КА на ввод информации сигнал о выдаче данных периферийным устройством ППИ осуществляется через разряд 4 канала КС, сигнал подтверждения приема ППИ выдает на ПУ через разряд 5 канала КС.
При выводе информации через канал KB разряд 1 канала КС используется для выдачи на ПУ сигнала (лог.О) вывода данных, через разряд 2 канала КС осуществляется прием от ПУ сигнала (лог.О) подтверждения записи выданных из ППИ данных в ПУ.
|
|
|
При выводе данных через канал КА для передачи указанных сигналов используются соответственно разряды 7 и 6 канала КС.
Режим 2. В режимах 0 и 1 направление передачи между каналами ППИ и подключенными к ним периферийными устройствами задается управляющим словом, предварительно засылаемым из МП в ППИ. Следовательно, в указанных режимах всякое изменение направления передачи между ППИ и ПУ требует предварительной посылки в ППИ соответствующего управляющего слова. Особенность режима 2 состоит в том, что сигналами Вв и Выв, посылаемыми в ППИ, устанавливается направление передачи не только между МП и ППИ, но и между ППИ и подключенным к нему ПУ. Таким образом обеспечивается возможность быстрого переключения направления передачи информации в целом между МП и ПУ без предварительной засылки управляющего слова в ППИ при каждом изменении направления обмена.
В режиме 2 может работать только КА. Для передачи управляющих сигналов в этом режиме используются следующие разряды канала КС разряд 4 для приема в ППИ сигнала (лог. О) выдачи данных из ПУ, разряд 5 для выдачи из ППИ сигнала (лог.1) подтверждения приема данных, разряд 7 для выдачи на ПУ сигнала (лог.О) вывода данных из ППИ, разряд 6 для приема от ПУ сигнала (лог.О) подтверждения записи в ПУ данных, выданных из ППИ.
Применение микропроцессоров в системах управления технологическим оборудованием
Не ослабевающие темпы роста сложности технических объектов и требований к качеству управления ими влекут за собой необходимость использования в системах управления средств вычислительной техники, многофункциональность которых позволяет обеспечить множественность режимов управления, повысить способности системы к адаптации, обеспечить требуемые надежностные характеристики.
К числу задач, ставящихся перед системами управления, традиционно относятся следующие:
- формирование сложных импульсных последовательностей;
- определение длительности временных интервалов;
- аналого-цифровое и цифроаналоговое преобразование;
- "ввод—преобразование—вывод цифровых кодов" и др.
(' 70-х годов разработчики систем управления стали использовать вычислительные системы на базе микропроцессоров (МП), выпуск которых был освоен рядом производителей (Intel, Motorola и др.). Применение этой технологии разработки систем управления позволяло повысить скорость и эффективность проектирования новых систем на базе старых, снизить затраты на обнаружение и устранение неисправностей, а также удешевить производство.
Однако в силу своих архитектурных ограничений микропроцессоры не обладали возможностью непосредственно решать задачи управления, и для дос- шжения поставленных целей разработчики вынуждены были снабжать их набором дополнительных устройств: памятью программ и данных, а также набором периферийных элементов: таймерами, счетчиками, аналого-цифровыми (АЦП) и цифроаналоговыми преобразователями (ЦАП), программируемыми контроллерами ввода-вывода и т. п.
Характерный пример структуры подобной системы показан на рис.
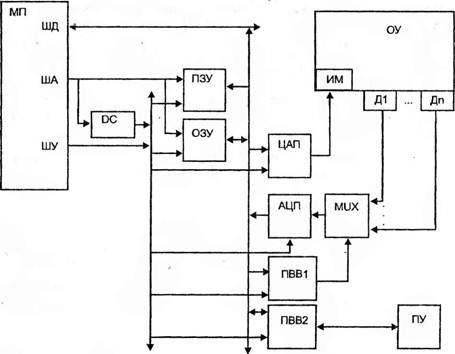
Структура системы управления на базе микропроцессора
Здесь применен микропроцессор МП с шинами данных ШД, адреса ША и управления ШУ. Программа функционирования МП занесена в энергонезависимую память ПЗУ, необходимые переменные и выборки измерений хранятся в оперативной памяти ОЗУ. Объект управления ОУ имеет аналоговый исполнительный механизм ИМ и снабжен системой аналоговых датчиков Д1—Ды- Для возможности изменения оператором режимов работы системы применяется пульт управления ПУ.
Взаимодействие МП с ОУ и ПУ напрямую невозможно, и для их сопряжения применен ряд периферийных устройств.
Дешифратор DC дополняет ШУ сигналами активизации устройств по их адресу. Процессор ввода-вывода ПВВ1 на основе информации с ШД под воздействием сигналов с ШУ управляет мультиплексором MUX для подачи на вход аналого-цифрового преобразователя АЦП аналогового сигнала с одного из датчиков. АЦП преобразует сигнал в цифровую форму и выдает его на ШД под воздействием сигналов с ШУ. Процессор ввода-вывода ПВВ2 передает н систему информацию о воздействиях оператора, взаимодействуя с ПУ. Цифроапалогонын преобразим л гель ЦАЦ по коду с ШД и управляющим сигналам с ШУ выдает на исполнительный механизм ИМ объекта управления ОУ управляющее воздействие.
Описанная структура с непринципиальными изменениями употреблялась в разработках достаточно часто, в связи с чем возникла идея интеграции наиболее часто применяемых элементов систем управления на одном кристалле (подобная идея интеграции применялась и ранее, что дало разработчикам возможность скомпоновать набор транзисторов в виде интегральной микросхемы).
Воплощение идеи произошло в 1976 году с выпуском фирмой Intel устройства под кодовым обозначением 8048, позднее получившего название микроконтроллер (МК) и ставшего основой систем управления, встраиваемых в робототехнические комплексы, бытовую электронику и др.
Под микроконтроллером здесь и далее подразумевается программируемое вычислительное устройство, обладающее набором периферийных устройств и применяемое для решения задач управления в технических системах.
Появившись на рынке, МК наращивали свою популярность, и в настоящее время применяются чрезвычайно широко — объем выпуска микроконтроллеров продолжает увеличиваться и составляет в настоящее время около двух миллиардов штук в год.
По области применения, структурной организации, разрядности, набору периферийных устройств, системе команд и прочим признакам МК сгруппированы в семейства, число которых достаточно велико. К наиболее ярким представителям различных семейств следует отнести 32-разрядные микроконтроллеры фирмы Motorola, 16-разрядные микроконтроллеры MCS-96 Intel, RISC-микроконтроллеры AVR фирмы Atmel, миниатюризированные РК контроллеры фирмы Microchip, микроконтроллеры общего назначения SAB фирмы Siemens.
Структура микроконтроллера
Микроконтроллер представляет собой вычислительную систему, реализованную в виде одной интегральной схемы, и включает следующие основные блоки: ядро, память программ и память данных, периферийные устройства (рис.).
| Память программ | |
| Ядро микроконтроллера | |
| Память данных | |
| Периферийные устройства |
Ядро микроконтроллера реализует процесс управления, задаваемый программой. На базе микроконтроллерного ядра фирмами-производителями интегральных схем разрабатываются изделия, различные по номенклатуре модулей памяти и периферийных устройств, но совместимые между собой по системе команд и циклам обмена данными. Множество совместимых по этому признаку МК носит название семейства микроконтроллеров.
Память программ предназначена для хранения управляющих программ. Необходимые для процесса управления данные располагаются в памяти данных.
Периферийные устройства предназначены для обеспечения сопряжения МК с внешними объектами и аппаратной реализации ряда управляющих функций.
Микроконтроллеры, как и вычислительные машины других классов, реализуются на основе гарвардской или принстонской архитектур (рис.). В микроконтроллерах, выполненных на основе гарвардской архитектуры, программы и данные располагаются в логически независимых блоках памяти с различными методами доступа. В микроконтроллерах, выполненных на основе принстонской архитектуры, программы и данные могут располагаться в общем блоке памяти; для обращения используется единый метод доступа.
К числу типовых, наиболее часто интегрируемых на кристалл МК периферийных устройств, относятся следующие блоки:
- параллельные цифровые порты ввода-вывода, осуществляющие обмен данными, представленными в виде логических сигналов;
- таймеры-счетчики, осуществляющие формирование временных интервалов и выполняющие подсчет логических событий;
- узлы аппаратной обработки событий с привязкой по времени;
- цифроаналоговые и аналого-цифровые преобразователи, осуществляющие вывод и ввод непрерывных сигналов;
- последовательные порты ввода-вывода, осуществляющие обмен данными в распределенных системах;
- блоки обслуживания прерывающих событий;
-средства повышения надежности функционирования.
Каждый периферийный узел МК обладает возможностью настройки посредством записи управляющих кодов в программно-доступные конфигурационные регистры узла, называемые регистрами специальных функций. Настройка позволяет производить выбор режима работы устройства (например, требуемой разрядности таймера, направления передачи данных на разрядах параллельного порта и т. п.).
Состав размещаемых на МК периферийных блоков зависит от целевого назначения устройства и определяется производителем на основе типовых задач, реализуемых на микроконтроллерах данного семейства.
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 3526; Нарушение авторских прав?; Мы поможем в написании вашей работы!