КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Интеллектуальные средства управления на основе современных информационных технологий
|
|
|
|
ЛЕКЦИЯ 16
Процесс плазменного напыления отличается низкой стабильностью. Разброс свойств покрытий на отечественном оборудовании может достигать 200%. Качество покрытия характеризуется многими свойствами: прочностью сцепления покрытия с основой, когезионной прочностью напыленного слоя, минимальной или регулируемой пористостью, равномерной толщиной покрытия, а также регулируемым уровнем остаточных напряжений. На эти свойства влияет более 60 различных факторов. Управление качеством покрытий включает в себя выбор технологических параметров процесса, влияющих на показатели качества покрытий, и регулирование ими (стабилизации или изменения по заданной программе).
Управляющие воздействия можно разделить на режимные (величина тока дуги, напряжение, расход и состав плазмообразующего газа, расход порошка и транспортирующего газа) и кинематические (дистанция, угол напыления, скорость перемещения и подача плазматрона, скорость вращения заготовки) [1].
Наиболее важные задачи при управлении этим технологическим процессом является обеспечение необходимой толщины и пористости покрытия.
Плазменная установка является объектом, где сложность и многообразие протекающих физико-химических превращений сочетается со слабой информативностью процесса и в некоторых случаях значительную роль играют скорее не количественные показатели, а качественные оценки. Хотя покрытия и наносятся по регламенту, решения по коррекции технологических параметров принимаются оператором на основе личного опыта и носят, по сути, интуитивный характер. Как следствие этого, процесс управления плохо поддается автоматизации в рамках четкой математической логики. Применение же аппарата нечеткой логики позволит моделировать механизм принятия решения и улучшить качество управления установкой.
|
|
|
В отличие от традиционной математики, требующей на каждом шаге моделирования точных и однозначных формулировок закономерностей, нечеткая логика предлагает совершенно иной уровень мышления: процесс моделирования происходит на наивысшем уровне абстракций, при котором постулируется лишь минимальный набор закономерностей [2]. Решающую роль в оптимизации показателей эффективности играют эксперты, которые формулируют правила, определяют количество входных и выходных переменных, число термов для каждой переменной, виды функции принадлежности, так как изменение этих параметров приводит к улучшению или ухудшению процесса управления установкой.
Установка (Рис.1), обеспечивающая стабилизацию режимов напыления, должна включать в себя нечеткий регулятор, в который вводят заданную толщину и пористость покрытия. В процессе напыления производится опрос датчиков толщины и пористости.
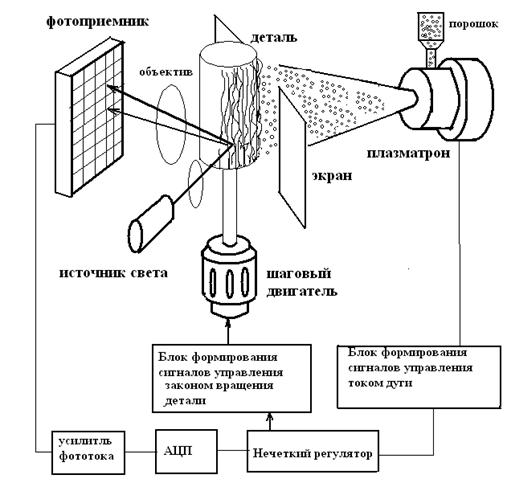
Рис.1 Схема процесса плазменного напыления
В случае отклонения указанных параметров на регулятор тока подается сигнал, увеличивающий (уменьшающий) ток дуги, а также уменьшение или увеличение частоты импульсов, поступающих на двигатель вращения напыляемой детали. Для нанесения покрытий с переменными свойствами изделие разбивают на элементарные участки, на каждом из которых свойства принимаются постоянными. На границе участков по сигналу с устройства, фиксирующего положение плазматрона относительно изделия, режим напыления и перемещения изменяется. В пределах каждого участка работает алгоритм стабилизации.
Известно, что физические свойства материалов можно рассматривать как выражение количественной меры их структурной реакции на внешнее воздействие заданной природы. Используемая система контроля обладает расчетно-аналитическими возможностями, превращающими его в систему фотометрической диагностики состояния плазменных покрытий и в средство измерения локальных реальных физических характеристик поверхности покрытия. Физической основой системы является совместный анализ изображения поверхности покрытия и спектра яркости белого света, отраженного от поверхности напыляемой детали и принимаемых фотоприемником. При этом на анализируемом изображении выделены отдельные пиксели, дающие вклад в отражение в выделенном пользователем диапазоне интенсивностей. Первым шагом анализа является проверка степени структурной однородности исследуемого образца в исходном состоянии. При этом под структурной однородностью материала понимается степень однородности распределения на его исходной поверхности микронеровностей задаваемых технологической наследственностью (в результате технологической обработки материала). Именно шероховатость и ее распределение по поверхности образца определяет локальные условия отражения от нее источника света.
|
|
|
Изображение поверхности всех фрагментов детали вводятся в регулятор и с них снимаются спектры отражения белого света. Каждый спектр отражения представляет собой разложение отраженного от поверхности образца белого света по степеням яркости (по интенсивности отражения). Обычно используется диапазон из 256 градаций. Каждый из диапазонов яркости несет в себе информацию о состоянии шероховатости поверхности, которая проявляется в характере ее отражающей способности. Если рельеф глубокий, то на этих участках отмечается повышенное поглощение падающего света (коэффициент экстинкции). При качественном напылении отражение от точек поверхности носит регулярный характер и имеет сравнительно однородное распределение. При отклонении в режимах напыления отражение от точек отличается нерегулярным характером и случайным распределением [3]. Задача состоит в том, чтобы проследить процесс формирования плазменных покрытий и воздействуя на входные параметры управлять им. Измерительная цепь позволяет осуществлять измерение, как нагретых тел, так и холодных за счет подсветки контролируемого участка.
|
|
|
Для измерения толщины покрытия используется принцип оптической триангуляции. Источник света посылает через линзу луч, который отражается от объекта и фокусируется на матрице из фотодиодов (ПЗС), которая преобразует световые сигналы в электрические. Всякое изменение расстояния до поверхности вызывает изменение угла отражения луча и, следовательно, позицию, которую отраженный луч занимает на матрице. Сигналы изображений от матрицы через усилители и АЦП поступают в регулятор, который осуществляет обработку сигналов изображений. Таким образом, производится одновременный анализ пространственных и спектральных свойств объекта. В устройстве реализуется синхронное получение информации датчиком с поверхности, траектория которой совпадает с траекторией напыления. При завершении полного оборота в блоке памяти фиксируются данные о параметрах напыленной поверхности по всему контуру детали. На основе этой информации нечеткий регулятор формирует необходимые управляющие воздействия - скорости вращения шагового двигателя и тока дуги, которые реализуются в последующем цикле.
Как известно, рассматриваемый процесс сопровождается свечением плазменной струи над напыляемой поверхностью. В результате возникает значительная погрешность от оптической помехи, вызванной этим эффектом. Для устранения этого влияния используем разностный сигнал от поверхности Ai при отсутствии Q0(x,t) и наличия света от осветителя Q(x,t).
 , (1)
, (1)
где b(t) – интегральная чувствительность датчика.
Основой устройства управления для плазменного напыления является нечеткий регулятор [4], который использует базы нечетких знаний и реализует композиционные правила логического вывода на основе входной информации, поступающей от фотоэлектрического датчика (Рис.2).
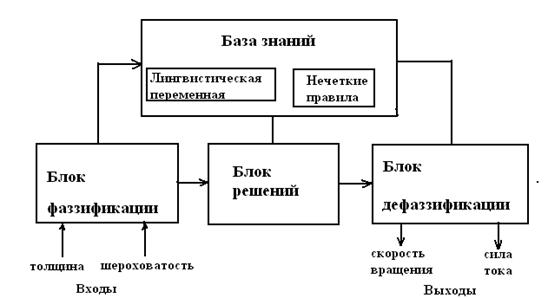
Рис.2 Структурная схема нечеткого регулятора
Теория нечетких множеств и приближенных рассуждений опирается на понятия лингвистической переменной, систему операций над нечеткими множествами и методы построения функции принадлежности.
|
|
|
Состояние покрытия описывается лингвистическими переменными «толщина» и «шероховатость», значения которых задаются с помощью с помощью средств естественного языка и используются для выражения необходимых качественных оценок. Лингвистическая переменная «толщина» может принимать значения из следующего набора характеристик (термов): «малая», «нормальная» и «большая». Соответственно лингвистическая переменная «шероховатость» - «низкая», «средняя», «высокая». Возможные управляющие решения по «скорости вращения» и «току дуги» ограничены в зависимости от конкретной ситуации тремя управляющими воздействиями: «Увеличить УВ», «Не изменять НИ», «Уменьшить УМ». В блоке фаззификации каждому значению лингвистической переменной ставится в соответствие некоторое нечеткое множество со своей функцией принадлежности. Функция принадлежности выражает субъективную возможность наличия определенных свойств. В блоке решений производятся логические операции над нечеткими множествами. В блоке дефаззификации производится процесс нахождения обычного (не нечеткого) значения выходных лингвистических переменных методом центра тяжести. Значение выходной переменной равно абсциссе центра тяжести площади, ограниченной графиком кривой функции принадлежности выходной переменной.
Рассмотрим процедуру поиска управляющего решения на основе алгоритмов нечеткого вывода.
1. Для каждого управляющего решения - по скорости вращения и току дуги, определим матрицы МУМ (Уменьшить), МНИ (Не изменять), МУВ (Увеличить), описывающие силу воздействия соответствующих управляющих решений.
2. Идентифицируем текущее состояние напыленного покрытия S0.
3.Моделируем выбранное управляющее решение. Для этого выполняем композицию нечетких значений признаков напыленного покрытия S0 и нечетких отношений, задающих силу воздействия выбранного управления. В результате получим состояние покрытия S1.
4.Находим величину требуемого управляющего воздействия. Сначала определяем нечеткое отношение, композиция которого с S0 приводит к получению S1. Для этого вычисляем декартово произведение S0´S1 и строим матрицу нечетких управляющих решений М.
5. Раскладываем полученное управляющее решение в базисе («УМ», «НИ», «УВ») и находим управляющее воздействие в нечетком виде R.
6. Определяем количественное значение управляющего решения. Для этого строим объединение конъюнкций нечетких множеств, задающих термы «УМ», «НИ», «УВ», со степенями принадлежности этих термов нечеткому множеству R и находим центр площади полученной фигуры.
Заключение.
1.В статье предложена схема установки для плазменного напыления с использованием нечеткого контроллера.
2.Рассмотрена процедура поиска управляющего решения на основе алгоритмов нечеткого вывода.
Не имея методики оценки топографических свойств поверхности и ее геометрических характеристик, адекватно отражающей реальные процессы формирования поверхностного рельефа, невозможно с удовлетворительной достоверностью предсказать поведение этой поверхности в процессе эксплуатации детали или изделия. Особая заинтересованность в такой оценки проявляется в прогнозировании эксплуатационных характеристик таких сложных технических систем, как изделия медицинского назначения с повышенными требованиями к надежности и безопасности функционирования[1]. Все это ставит задачу разработки новых подходов в оценки шероховатости поверхности. Одним из возможных направлений поиска таких подходов является использование теории фракталов, а в качестве оценочного количественного параметра – фрактальной (дробной) размерности D и фрактальных сигнатур[2]. Теория фракталов служит базой для количественного описания диссипативных структур, формирующихся в условиях, далеких от равновесных состояний, как это происходит при плазменном напылении [3].
Анализ полученных с помощью электронного микроскопа фотографий агрегатов частиц (рис.1), напыленных при разных режимах, показывает различие и в их фрактальных размерностях - D. Программная реализация методов вычисления фрактальных характеристик плазмонапыленных покрытий [4,5] позволяет непосредственно на экране компьютера отображать экспериментальные распределения локальных фрактальных размерностей (рис.2).
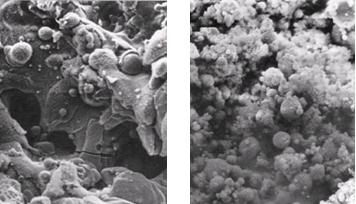
D=1,83 D=1,37
Рис.1 Микроструктура плазмонапыленного биопокрытия из гидроксиапатита при разных параметрах напыления.
Цвет каждой траектории изображения на образце прямо пропорционален значениям Di. Все изображения получаются в большой палитре псевдоцветов. При этом на двумерном изображении поверхности образца псевдоцветом выделяются все кластеры заданной величиной D фрактальной размерности.
Важной задачей является установить соотношение между параметрами напыления и фрактальной размерностью. В данной работе показано использование нейронных сетей и генетического алгоритма оптимизации для ее обучения. Биологический нейрон имеет тело (сому), дерево входов – дендритов, и выход – аксон (рис.3.a). На соме и дендритах располагаются окончания других нервных клеток. Каждое такое окончание называется синапсом. Проходя через синапс, электрический сигнал меняет свою амплитуду: увеличивает или уменьшает. Это можно интерпретировать как умножение амплитуды сигнала на весовой (синаптический) коэффициент, который может меняться в процессе функционирования синапса. Входные сигналы суммируются в соме, и затем на аксоном выходе генерируется выходной импульс, поступающий на дендриты других нейронов. Искусственный нейрон работает подобным образом. Нейронной сетью называется динамическая система, состоящая из совокупности связанных между собой узлов называемых формальными нейронами, и способная генерировать выходную информацию в ответ на входное воздействие.
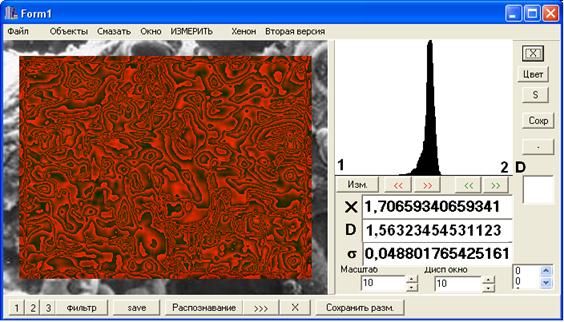
Рис.2 Поле и экспериментальное распределение локальных фрактальных размерностей
Математическую модель искусственного нейрона можно представить уравнением
 (1)
(1)
где y – выходной сигнал нейрона; f(R) – функция выходного блока нейрона; wi – постоянный коэффициент – вес i – го входа; xi – i-й входной сигнал; i=1,2,3,…,n – номер входа нейрона. Выражению (1) может быть поставлена в соответствие структурная схема искусственного нейрона, представленная на рис.3(b). Как видно из рисунка схема включает n входных блоков умножения на коэффициенты wi, один сумматор и выходной блок функционального преобразования. Функция, которую реализует выходной блок, получила название функции активации. Коэффициенты wi получили название синаптических коэффициентов или коэффициентов межнейронной связи. Эти коэффициенты являются аналогами синапсов биологических нейронов.
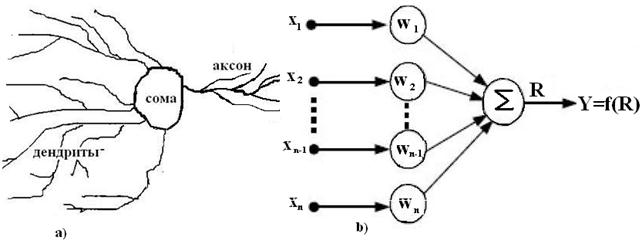
Рис.3 Биологический (a) и искусственный нейрон (b)
Перед началом работы на блок сумматора подают сигнал начального состояния. На каждый вход нейрона поступают сигналы xi либо от других нейронов, либо с устройства ввода. Каждый входной сигнал xi умножается на коэффициент межнейронной связи wi. В блоке сумматора взвешиваются входные сигналы и алгебраически складываются. Результат суммирования R подается на блок функционального преобразования f(R). Вид функции активации во многом определяет возможности нейронных сетей и метод обучения этой сети. В нашей работе применялась функция активации на базе гиперболического тангенса f[R(t)]=th[R(t)].
Искусственная нейронная сеть (рис.4) не производит вычислений, она трансформирует входной сигнал (входной образ – ток дуги, дисперсность порошка, дистанция напыления) в выходной (фрактальность нанесенного покрытия) в соответствии со своей топологией и значениями коэффициентов межнейронной связи. При функционировании нейронной сети выделяют два главных режима работы – обучение и рабочий. Суть режима обучения заключается в настройке коэффициентов межнейронных связей на совокупность входных образов конкретной задачи.
Установка коэффициентов осуществляется на примерах, сгруппированных в обучающие множества. Такое множество состоит из обучающих пар (не менее 100), в которых каждому эталонному значению входного образа соответствует желаемое (эталонное) значение выходного образа (Табл.1).

Рис.4 Искусственная нейронная сеть для моделирования процесса напыления
Таблица 1
Пример обучающих пар для расчета коэффициентов межнейронных связей
| Режим напыления (входной образ) | Фрактальность покрытия D (выходной образ) | ||
| Ток дуги, А | Дисперсность порошка, мкм | Дистанция напыления, мм | |
| 50-60 | 2,36 | ||
| 70-80 | 2,48 | ||
| 40-50 | 2,57 |
При первой подаче очередного эталонного входного образа (ток дуги, дисперсность порошка, дистанция напыления) выходной сигнал (фрактальность) отличается от эталонного. Блок обучения оценивает величину ошибки и корректирует коэффициенты межнейронных связей с целью ее уменьшения. При каждой последующей подаче этого же эталонного входного образа ошибка уменьшается. Процесс продолжается до тех пор, пока ошибка не достигнет требуемого значения. Подсчет отклонения производится суммированием и делением разности между полученным выходным значением и количеством «пар». Мерой успешности данного решения служит отклонение, являющееся разницей между исходными выходными данными и данными, полученными при подстановке в сеть всех тренировочных входных данных, т.е.
 ,
,  , (2)
, (2)
где  - значение, полученное при пропускании входных параметров i-го тренировочного комплекта через текущее решение данной сети;
- значение, полученное при пропускании входных параметров i-го тренировочного комплекта через текущее решение данной сети;
 - действительное значение выходного параметра;
- действительное значение выходного параметра;
 - отклонение сети для i-го тренировочного комплекта;
- отклонение сети для i-го тренировочного комплекта;
 - общее количество тренировочных комплектов;
- общее количество тренировочных комплектов;
 - среднее отклонение сети по всем тренировочным комплектам, является мерой успешности обучения.
- среднее отклонение сети по всем тренировочным комплектам, является мерой успешности обучения.
Процесс обучения представляет собой решение задачи оптимизации, целью которой является минимизация функции ошибки на данном множестве примеров путем выборки коэффициентов межнейронных связей. Для того чтобы каждая компонента входного вектора данных лежала на отрезке [0,1] или [-1,1] проводят нормирование и центрирование. При известном диапазоне изменения входной переменной, например [xmin,xmax] целесообразно использовать вид преобразования выполняемый по формуле
 , (3)
, (3)
где [a,b] –диапазон приемлемых входных сигналов; [xmin, xmax] – диапазон изменения значений входной переменной (например: ток дуги); p – преобразованный входной сигнал, подаваемый на вход нейронной сети.
В качестве алгоритма обучения сетей используется генетический алгоритм, как наиболее прогрессивный на данный момент. Генетический алгоритм - это стратегия выхода из локальных оптимумов, ради достижения глобального минимума. Она заключается в параллельной обработке множества альтернативных решений, концентрируя поиск на наиболее перспективных из них.
Основой эволюционных процессов служит популяция, в данном случае это многообразие сетей, свойства каждой из сетей (особей) представлены в виде набора коэффициентов, образующих матрицы преобразования (A..Z) и смещения (a..z) каждого слоя, содержащегося в сети. Т.е. решение ищется в виде
 (4)
(4)
где  - вектор входных значений.
- вектор входных значений.
Нами введены новые понятия: эра - промежуток времени, состоящий из N эпох, реальность - направление развития популяции за период эры. Эти понятия служат для описания усовершенствований в традиционном генетическом алгоритме. В каждый момент времени существуют K реальностей, каждой из которых поставлена в соответствие совокупность нейронных сетей. В момент начала новой эры происходит определение наилучшей совокупности сетей и параметрами остальных нейронных сетей становятся параметры наилучшей. Таким образом, на графике отклонений в момент перехода в новую эру мы имеем характерную точку, совпадающую с отклонением наилучшей совокупности сетей. Последующее обучение начинается, в отличие от начального момента, с определенных значений достигнутой наилучшей совокупности. Критериями остановки обучения служат прохождение определенного количества эр, либо достижение максимально требуемого отклонения. Следует отметить, что разделение на эры позволяет не только найти наиболее оптимальное решение, но и распределить решение задачи для сети из нескольких компьютеров.
Рассмотрим работу генетического алгоритма функционирования, приведенного на рис.5,6.
Происходит задание начальных параметров обучения и тренировочных комплектов.
Устанавливается количество эр.
Количество реальностей можно сделать изменяемым с течение эр.
Сохраняются все матрицы весовых коэффициентов и смещений лучшей сети из реальности.
Сравниваются отклонения лучших сетей всех реальностей и находится наименьшее отклонение, что позволяет всем совокупностям сетей новой эры присвоить свойства лучшей реальности предыдущей эры.
Происходит создание новой совокупности сетей и определение начальных весов всех сетей (если это первая эра, то эти значения произвольны).
Количество эпох соответствует количеству итераций подбора коэффициентов данной совокупности.
При достижении максимально требуемого отклонения цикл прерывается.
В зависимости от выбранных параметров отбора происходит разделение особей на подходящие для дальнейшего размножения и на недееспособные, подлежащие уничтожению.
10) Кроссинговер - оператор, который выбирает две родительские особи (сети) и путем передачи некоторых весов от одной к другой образуется необходимое количество новых особей. Мутации - добавляют небольшие изменения к передающим весам. Путём мутаций возможно появление особей с новыми свойствами, лучшими чем у родителей. Коэффициент мутации в данной программе вычисляется по формуле:
 , (5)
, (5)
где  - отклонение между решениями каждой из сетей;
- отклонение между решениями каждой из сетей;
 - подбирается для каждой задачи индивидуально и находится в диапазоне от 0,0001 до 0,01;
- подбирается для каждой задачи индивидуально и находится в диапазоне от 0,0001 до 0,01;
 - произвольное число 0..4 применяется для большего разнообразия мутаций.
- произвольное число 0..4 применяется для большего разнообразия мутаций. 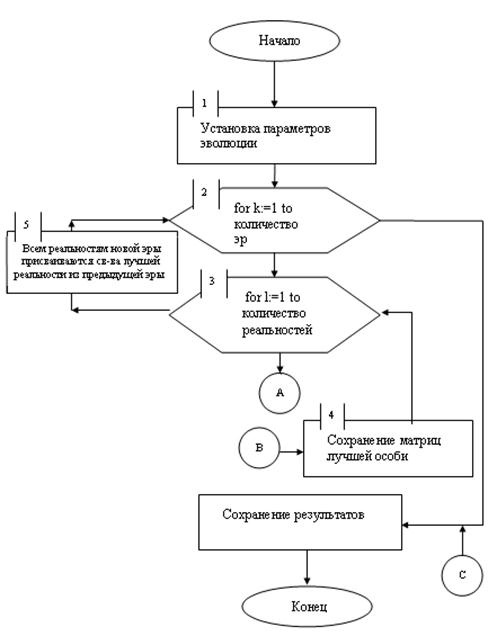
Рис.5 Блок-схема генетического алгоритма
11) После преобразований старая популяция заменяется на новую и происходит полное преобразование совокупности особей.
12) Происходит сравнение между тренировочными и выходными параметрами, а также рассчитываются отклонения полученного результата от истинного значения.
На этом заканчивается одна итерация.
С математической точки зрения задача обучения нейронных сетей сводится к продолжению функции, заданной в конечном числе точек на всю область определения. При таком подходе входные данные сети считаются аргументами функции, а ответ сети – значением функции.
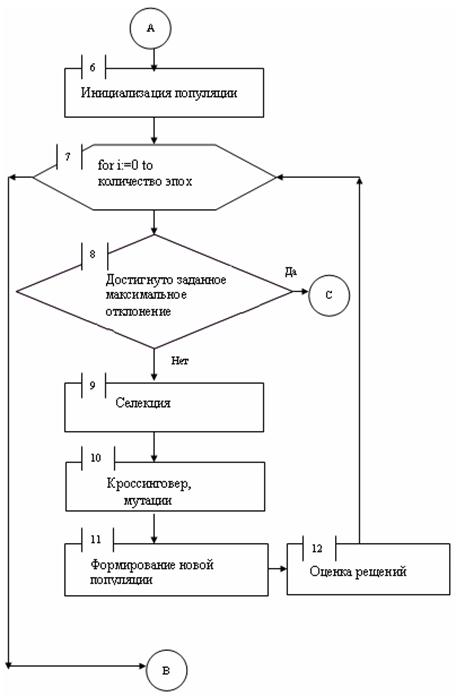
Рис.6 Продолжение генетического алгоритма
На этом заканчивается одна итерация.
Описанный алгоритм обладает тем свойством, что если долго пропускать через нейронную сеть все пары входных и выходных векторов, то придем к такому распределению весов, при котором для каждого входного вектора обеспечивается выработка правильного выходного вектора.
Нейронная сеть и генетический алгоритм реализованы в среде программирования Delphi. В диалоговом окне (рис.7) устанавливается конфигурация нейронной сети, количество тренировочных пар, количество эпох, количество слоев, адрес регистра откуда считываются параметры плазменного напыления и адрес регистра куда записывается фрактальная размерность. В левой стороне окна показан процесс обучения нейронной сети с каждой итерацией, количество которых задаются в окне «количество эпох». Это отклонение подсчитывается по формуле (2) и как видно из рисунка с каждой итерацией приближается к нулю. Достоинство данной программы состоит в том, что для обучения и настройки сети можно задавать произвольное количество входных параметров плазменного напыления, а на выходе получать один – фрактальную размерность.

Рис.6 Диалоговое окно для настройки нейронных сетей для плазменного напыления
Заключение
1. В данной статье впервые приведена методика определения фрактальной размерности плазмонапыленных покрытий при известных параметрах напыления с использованием нейронных сетей.
2. Обучение нейронных сетей производилось с помощью генетического алгоритма оптимизации как наиболее прогрессивного на данный момент.
3.Нейронная сеть и генетический алгоритм обучения реализованы в среде программирования Delphi.
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 1672; Нарушение авторских прав?; Мы поможем в написании вашей работы!