КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Випливає, що
|
|
|
|
Динамічний фактор і динамічні характеристики.
Тягова динаміка і паливна економічність автомобіля.
Лекція №4
План:
1 Динамічний фактор і динамічні характеристики.
2.Тяговий розрахунок автомобіля.
3.Паливна економічність автомобіля.
З тягового балансу автомобіля, який для загального  випадку руху описується рівнянням
випадку руху описується рівнянням
Pk = ψGa ± δоб Ga  + Pw (4.1)
+ Pw (4.1)
Pk - Pw = Ga (ψ ± δоб ), (4.2)
де Pk – дотична сила тяги; ψ – зведений коефіцієнт опору дороги; Ga – експлуатаційна сила тяжіння автомобіля; Pw - сила опору повітря; δоб – коефіцієнт обертових мас автомобіля; j, g – прискорення нерівномірного прямолінійного руху та вільного падіння.
У рівнянні (4.2) різниця Pk - Pw відображає силу тяги, необхідну для подолання всіх зовнішніх опорів руху автомобіля, не враховуючи опору повітря. Вказана різниця пропорційна експлуатаційній силі тяжіння Ga автомобіля або сумарній силі тяжіння автопоїзда, якщо автомобіль
На рис. 6.3, б зображена схема сил, що діють на автомобіль у поперечній площині при сталому русі, на заокругленні дороги з уклоном, спрямованим до осі y—y заокруглення. У даному випадку перекидання можливе навколо осі О". Оскільки в момент початку перекидання ліві колеса відриваються від дороги і реакція У' дорівнює нулю, то умова рівноваги автомобіля відносно осі О" прийме вигляд:

Звідси після підставляння значення Рц з (6.9) і з урахуванням (6.12) одержимо формулу для розрахунку критичної швидкості vк руху на повороті:
Якщо поперечний уклон дороги спрямований у бік, протилежний центру заокруглення, то
При аналізі стійкості руху на заокругленнях дороги автомобіля-цистерни необхідно враховувати наступне. Якщо цистерна заповнена рідиною неповністю, то вона змішується у цистерні під дією відцентрових сил так, що центр ваги автомобіля переміщується в бік, протилежний центру заокруглення, і вверх. Це знижує стійкість його руху на заокругленнях дороги.
|
|
|
На заокругленні, що не має уклону:
Небезпека перекидання може виникати також у випадку заклинювання ведучих коліс (рис. 6.4). При цьому ведучі півосі перестають обертатися і починає обертатися остов машини навколо осі Ок коліс, що зупинились.
Остов повертається під дією реактивного моменту, що діє з боку заклинених коліс і дорівнює ведучому моменту. Його граничне значення Мпр
де Rцт — відстань між центрами ваги і повороту.
Розкладемо силу Рц на дві складові, що Діють у поздовжній і поперечній площинах машини. Перша з них (поздовжня) виникає перерозподіл нормальних реакцій, що діють на передні і задні колеса, а друга намагається перекинути машину на бік. Бокова поперечна складова від центрової сили;

де  - кут нахилу результуючої відцентрової сили до поперечної площини;
- кут нахилу результуючої відцентрової сили до поперечної площини;  - середня швидкість руху машини на повороті.
- середня швидкість руху машини на повороті.
Із збільшенням швидкості руху і зменшенням радіусу повороту відцентрова сила різко зростає і може перевищити всі інші бокові сили, що діють на машину. Як випливає з формули (6.9), навіть при помірній швидкості руху автомобіля ( =15 м/с) і не дуже крутому повороті (R=4 м), бокова складова  перевищує 0,5G
перевищує 0,5G
При вході машини в поворот крім відцентрової сили виникають також інерційні, тому що перехід від прямолінійного, руху до сталого криволінійного (з постійним радіусом повороту) супроводжується безперервною зміною положення центра повороту О, зменшенням радіуса повороту R. і відповідним збільшенням кутової швидкості Шц. Для бокової стійкості має значення та обставина, що при вході в поворот відбувається відносне обертання центра ваги машини навколо середини заднього моста 02 з тангенціальним прискоренням  , де
, де  — поздовжня координата центра ваги (радіус відносного обертання), а
— поздовжня координата центра ваги (радіус відносного обертання), а  — кутове прискорення. В результаті цього виникає тангенціальна сила інерції, яка на рис. 6.3 показана штриховою лінією. Різкий поворот, особливо на великій швидкості, може призвести до значного збільшення сумарної бокової сили інерції:
— кутове прискорення. В результаті цього виникає тангенціальна сила інерції, яка на рис. 6.3 показана штриховою лінією. Різкий поворот, особливо на великій швидкості, може призвести до значного збільшення сумарної бокової сили інерції:
|
|
|

і порушення стійкості руху машини.
Під час руху автомобіля по дорогах на його поперечну стійкість істотно впливає поперечний профіль полотна дороги на заокругленнях. Якщо поперечний уклон дороги спрямований у бік, протилежний центру заокруглення, то бокова складова ваги автомобіля і відповідна складова відцентрової сили, що виникає при повороті, діють в одному напрямку, намагаючись перекинути автомобіль.
агрегатуються з причепом. Тому відношення (Pk - Pw)/ Ga, що характеризує запас сили тяги яка припадає на одиницю сили тяжіння автомобіля
/ автопоїзда /, є показником його динамічних властивостей. Дане відношення називається динамічним фактором автомобіля D, який розраховується за формулою
D = Pk - Pw / Ga; (4.3)
Pk = Мд ітр ηтр/ rк;
де Мд – крутний момент двигуна, котрий відповідає швидкісній характеристиці, знятій під час повної подачі палива /повному відкритті дросельної заслінки /; ітр,ηтр – передаточне число і механічний к.к.д. трансмісії автомобіля; rк – динамічний радіус ведучих коліс.
Між динамічним фактором і параметрами, що характеризують опір руху автомобіля, існує наступна залежність
D = ψ ± δоб . (4.4)
Динамічний фактор, як питомий параметр, дозволяє порівнювати динамічні властивості різних автомобілів незалежно від їх вантажопідйомності та сили тяжіння.
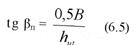
Графік залежності динамічного фактора від швидкості руху називається динамічною характеристикою автомобіля. Нарис. 4.1 зображена динамічна характеристика вантажного автомобіля з чотириступінчастою трансмісією. Згідно з числом передач на характеристику нанесено чотири криві динамічного фактора. Номери передач на кривих римськими цифрами. Чим нижчий номер передачі, тим вище проходить крива динамічного фактора внаслідок збільшення Pk і зменшення Pw. З лівої сторони криві обмежуються мінімальною частотою обертання колінчастого вала, на якій можлива робота двигуна, а з правої сторони – допустимою максимальною частотою обертання. Точки перегину кривих відповідають режиму роботи двигуна з максимальним крутним моментом.
|
|
|
Розглянемо послідовність побудови динамічної характеристики.
Вибравши значення частот обертання колінчастого вала двигуна, визначають швидкості руху автомобіля V(км/год) на кожній передачі за формулою
V = 0377  , (4.5)
, (4.5)
де nд – частота обертання колінчастого вала двигуна, хв.-1;
rк – динамічний радіус ведучих коліс, м.
Визначається дотична сила тяги Pk(Н) та сила опору повітря Pw (Н)
Pk =  , (4.6)
, (4.6)
Pw=  , (4.7)
, (4.7)
де Мд – крутний момент двигуна, Нм; kw – зведений коефіцієнт опору повітря, Нс2/м4; F – площа лобової поверхні автомобіля, м2.
З врахуванням результатів розрахунків за формулами (4.6) і (4.7)
D =  , (4.8)
, (4.8)
Кінетична енергія, нагромаджена в результаті цього обертання, може виявитися достатньою для того, щоб обертання трактора продовжувалося і після того, як колеса вдаряться по дну заглибини або досягнуть вершини виступу, тобто щоб відбулося перекидання.
Кут бічного нахилу трактора, при якому можливе його перекидання внаслідок динамічних явищ, зумовлених рухом по нерівностях, становить 0 4—0,6 граничного статичного кута.
На поперечну стійкість трактора і автомобіля при криволінійному русі істотно впливають інерційні сили, що виникають при цьому.
Розглянемо найпростіший.випадок повороту колісної машини на горизонтальній ділянці при сталій швидкості і постійному радіусі обертання навколо центра повороту.
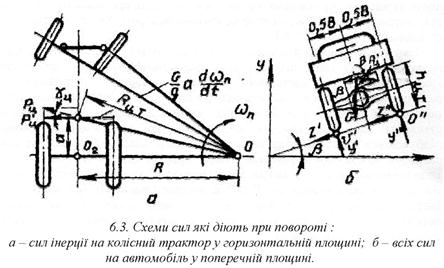
Припустимо що центр повороту О (рис. 6.3) розміщений у точці перетину геометричних осей всіх коліс машини. При повороті виникає результуюча відцентрова сила Рц, Прикладена до центра ваги машини і спрямована по радіусу від центра повороту. її визначають за формулою:
Цей кут залежить не тільки від поздовжньої бази, колії і висоти центра ваги, але й від положення вертикального шарніра. Зі зміною кута складання змінюється положення центра ваги. Тому граничний статичний кут ста пічної стійкості відповідає такому максимальному куту уклону, на якому при будь-якому маневруванні трактора, тобто при будь-яких кутах орієнтації і складання, зберігається контакт всіх коліс з ґрунтом.
|
|
|
Граничний статичний кут поперечної стійкості по перекиданню гусеничного трактора визначається так само, як для колісного. При достатній твердості ґрунту перекидання гусеничного трактора відбувається навколо осі, що проходить по зовнішніх бічних кромках гусениці. Тому:
де b — ширина гусениці.
Граничні статичні кути поперечної стійкості проти сповзання  визначають за формулою:
визначають за формулою:

де  2 — коефіцієнт зчеплення у боковому напрямку.
2 — коефіцієнт зчеплення у боковому напрямку.
Найбільш вірогідні дані про граничні статичні кути стійкості машин проти перекидання дають експериментальні методи, які передбачають застосування стендів у вигляді платформ, на які встановлюють машини, що можуть за допомогою гідросистеми нахилятися до моменту відривання їх коліс від платформи. За допомогою кутомірів фіксують кути статичної стійкості у момент відривання від платформи відповідних коліс.
Під час руху машини сили інерції, що виникають (відцентрова — при повороті, поздовжні — при розгоні і гальмуванні, бічні — при русі по нерівностях шляху тощо), можуть призвести до перекидання на схилі, значно меншому за той, що відповідає граничному статичному куту, і навіть на горизонтальному шляху.
Статистичні дані про причини перекидання тракторів свідчать про те, що 10,5 % випадків приходиться на втрату 1 статичної стійкості, 86,5 — динамічної і 3 % — на дію сторонніх предметів (зіткнення, вітер, каміння, що скочується із схилів тощо).
Переважна кількість (73 %) перекидань приходиться на бокове перекидання, майже половина з них є наслідком несприятливого рельєфу.
Для аналізу динамічної стійкості у таких випадках запропонований енергетичний підхід, суть якого полягає у наступному. При рантовому потраплянні коліс одного боку трактора у западину або наїзді цими колесами на виступ відбувається його обертання навколо прямої лінії, що проходить через центри контактів коліс протилежного боку з опорною поверхнею.
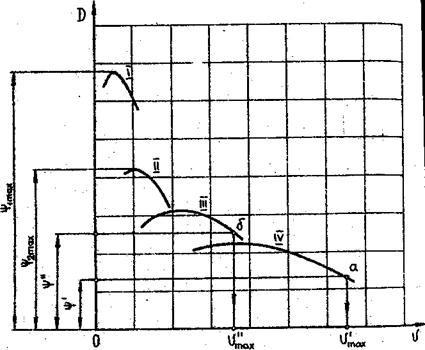
Рис. 4.1. Динамічна характеристика автомобіля
За допомогою динамічної характеристики можна розв’язувати задачі, які виникають під час експлуатації автомобіля.
Наприклад, визначимо, на яких передачах буде працювати автомобіль в дорожніх умовах, характеризованих значенням ψ зведеного коефіцієнта дорожніх опорів, якщо рух рівномірний, і які автомобіль зможе розвивати максимальні швидкості. Під час усталеного руху динамічний фактор дорівнює коефіцієнту ψ. Тому на осі ординат динамічної характеристики відкладаються відрізки, що відображають у масштабі, прийнятого для динамічного фактора, задані значення ψ/ та ψ//. Проводимо через вершини відкладених відрізків прямі, паралельні осі абсцис, до перетину в точках а і б з кривими динамічного фактора. Криві, на яких розміщені точки перетину, визначають номери передач, а проекції даних точок на вісь абсцис відповідають максимальним швидкостям руху V /max та V //max
Визначимо за допомогою динамічної характеристики, які найбільші дорожні опори зможе долати автомобіль, рівномірно рухаючись на першій та другій передачах. Оскільки у даних випадках повинні бути використані максимальні запаси динамічного фактора, рух автомобіля повинен здійснюватись у режимах, що відповідають точкам перегину кривих динамічного фактора. Ординати цих точок визначають максимальні значення ψ1 max та ψ2 max зведених коефіцієнтів дорожніх опорів, які автомобіль зможе подолати на першій і другій передачах. Отримані дані необхідно перевірити за умовою зчеплення з дорогою, оскільки під час побудови динамічної характеристики враховувались тільки тягові властивості автомобіля, зумовлені двигуном.
Назвемо динамічним фактором за зчепленням максимальне значення динамічного фактора, обмежуване зчепленням ведучих коліс з дорогою, і позначимо його Dφ. Вказане значення динамічного фактора отримується під час реалізації максимально можливої в заданих дорожніх умовах дотичної сили Pk φ. Згідно з таким визначенням
Dφ =  . (4.9)
. (4.9)
Для автомобіля із задніми ведучими колесами
Dφ = 
 = φλк -
= φλк -  , (4.10)
, (4.10)
де φ, λк – коефіцієнти зчеплення з дорогою та навантаження ведучих коліс.
Розрахуємо з використанням динамічної характеристики значення кутів підйому. які автомобіль здатний подолати в заданих дорожніх умовах на різних передачах. Для звичайних доріг з їх відносно невеликим нахилом приймають ψ = f ± i, тому для усталеного руху i = D – f. Таким чином, якщо для заданих дорожніх умов відомий коефіцієнт опору коченню f, замірявши динамічний фактор в тій чи іншій точці характеристики, з різниці
D – f знаходимо значення i допустимого підйому.
Підйом, що долається, може бути збільшений внаслідок використання
Для визначення кута уклону, на якому може відбутися відрив заднього колеса від опорної поверхні, розглядається умова рівноваги трактора відносно прямої, що проходить через центр контакту заднього колеса і центра шарніра передньої осі.
При бічному нахилі автомобіля має місце поворот його кузова відносно не підресорених мас, різні нормальні деформації шин по бортах, а також зміщення точок прикладання нормальних реакцій дороги відносно середини площин коліс. Це зумовлює зменшення граничного кута поперечної стійкості автомобіля по перекиданню.
Статична стійкість проти перекидання трактора з шарнірно з'єднаною рамою визначається кутом уклону, па якому трактор втрачає стійкість при деяких значеннях кутів складання і орієнтації на схилі. Для трактора з шарнірно з'єднаною рамою відрив одного з коліс від опорної поверхні не означає повну втрату7 стійкості машини. Після відриву одного з коліс із збільшенням кута уклону відбувається втрата стійкості і перекидання однієї з секцій трактора на обмежувальні упори другої секції. При подальшому збільшенні кута уклону відбувається відрив другого колеса і втрата стійкості всієї машини. Поетапна втрата стійкості є особливістю трактора з шарнірно з'єднаною рамою.
Граничним статичним кутом стійкості трактора з Шарнірно з'єднаною рамою вважається кут уклону, при якому відривається одне з його коліс.
розрахунку граничних статичних кутів  і
і  за формулами (6.1) і (6.2) повинні враховуватися координати центра ваги агрегату а агр.hагр.
за формулами (6.1) і (6.2) повинні враховуватися координати центра ваги агрегату а агр.hагр.
Граничні статичні кути поздовжньої стійкості машини проти сповзання на підйомі ( ) і на спуску (
) і на спуску ( ) визначають з умов рівності складової ваги, паралельної опорній поверхні, яка викликає сповзання, гальмівній силі Рт, яка утримує машину на уклоні (силами Р
) визначають з умов рівності складової ваги, паралельної опорній поверхні, яка викликає сповзання, гальмівній силі Рт, яка утримує машину на уклоні (силами Р  і моментами
і моментами  опору коченню для підвищення надійності нехтують).
опору коченню для підвищення надійності нехтують).
Для колісних тракторів, у яких гальмуються тільки задні колеса:

Для колісних машин, в яких гальмуються всі колеса, і для гусеничних:

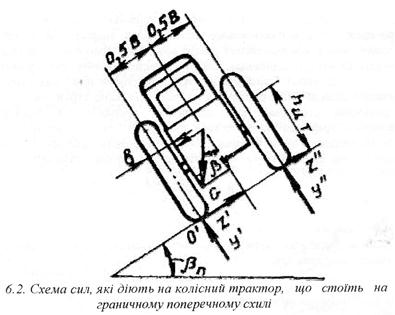
Граничні статичні кути поздовжньої стійкості машин проти перекидання і сповзання визначають аналогічно. На рис. 6.2 показана схема до розрахунку цих кутів для колісного трактора.
Очевидно, що коли центр ваги знаходиться у поздовжній площині симетрії трактора, то граничний статичний кут поперечної стійкості по перекиданню  визначають за формулою:
визначають за формулою:
де В — ширина колії трактора. Додатковий вплив на поперечну стійкість колісних тракторів чинить застосування у них хитної передньої осі. При бічному нахилі трактора остов його спочатку повертається навколо шарніра передньої осі, а після впирання в обмежувачі хитання осі перекидання продовжується за розрахунковою схемою.
інерції автомобіля, оскільки
і = D – f + δобj /q. (4.11)
Саме тому перед подоланням підйому автомобіль розганяють для накопичення кінетичної енергії. Найбільший кут підйому, який може подолати автомобіль з розгону, називається динамічним. Значення його завжди більше від кута підйому, що долається під час усталеного руху.
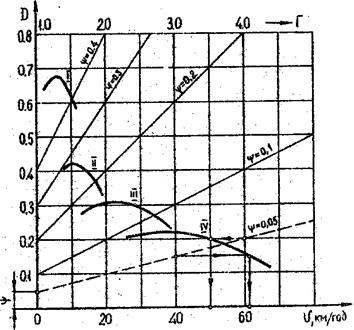
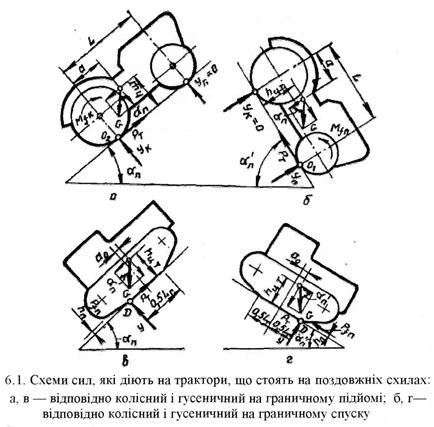
Рис. 4.2. Універсальна динамічна характеристика автомобіля.
В довідкові дані автомобілів, як правило, входять повністю або частково показники, що визначаються з динамічної характеристики: максимальна швидкість з усталеного руху в найбільш типових для даного виду автомобілів дорожніх умовах; динамічний фактор на прямій передачі під час швидкості, що найчастіше використовується (як правило, береться швидкість, яка дорівнює половині максимальної); максимальні значення динамічного фактора на найнижчій і проміжних передачах; максимальне значення динамічного фактора на прямій передачі та відповідне йому значення швидкості.
Динамічна характеристика, зображена на рис.4.1, побудована для автомобіля з заданою експлуатаційною силою тяжіння. Характеристика, яка
дозволяє аналізувати динамічні властивості автомобіля або автопоїзда у процесі зміни вагових навантажень, називається універсальною динамічною характеристикою / рис.4.2/. Перш ніж приступити до її розгляду, введемо поняття коефіцієнта навантаження Г автомобіля, розуміючи під цим відношення даної експлуатаційної сили тяжіння автомобіля / автопоїзда / Ga до його мінімальної експлуатаційної / власної / сили тяжіння Gо. Значення коефіцієнта навантаження Г може бути різним, починаючи від мінімального значення, рівного одиниці.
Універсальна динамічна характеристика поряд з нижньою віссю абсцис з нанесеною на ній поступальною швидкістю автомобіля V, має ще верхню вісь абсцис, на якій на якій відкладаються значення коефіцієнта навантаження автомобіля. З точок, що відповідають значенням коефіцієнта Г, проводяться вертикалі через всю характеристику до зустрічі з нижньою віссю абсцис.
Оскільки динамічний фактор автомобіля за однакових інших параметрів здійснюється обернено пропорційно його силі тяжіння, масштаби динамічного фактора на характеристиці повинні бути для кожного значення коефіцієнта навантаження автомобіля іншими. В зв’язку з цим на універсальній динамічній характеристиці будують осі ординат, що відповідають різним значенням коефіцієнта навантаження Г. На вертикалі проведеній через точку Г =1, відкладаються значення динамічного фактора для порожнього автомобіля з силою тяжіння Gо, а на інших вертикалях - значення динамічного фактора, які відповідають коефіцієнтам навантаження, прийнятим для даних вертикалей / осей ординат /. Якщо, наприклад,вибрати другою віссю ординат вертикаль, що проходить через точку Г = 2, то на ній масштаб динамічного фактора повинен бути вдвічі більшим, ніж на першій осі. З’єднаємо похилими прямими відрізки лівої масштабної шкали з відповідними за значенням відрізками, відкладеними на другій осі ординат. Точки перетину цих прямих з побудованими на характеристиці вертикалями утворюють на кожній вертикалі свою масштабну шкалу динамічного фактора для відповідного варіанту навантаження автомобіля.
Після цього на характеристиці, користуючись масштабною шкалою лівої осі ординат, наносяться криві динамічного фактора на різних передачах для автомобіля з коефіцієнтом навантаження Г =1.
Розглянемо, як визначити за допомогою універсальної динамічної характеристики, на яких передачах і з якими максимальними швидкостями зможе рухатися автомобіль / автопоїзд / в заданих дорожніх умовах, якщо значення коефіцієнта навантаження різні.
Відкладаємо на осях ординат характеристики, дотримуючись масштабів,
Для трактора з півжорсткою підвіскою опорних котків:
tg =  ; tg =
; tg = 
де Іг G sin — довжина опорної поверхні гусениці;  — зміщення центра ваги трактора відносно середини опорної поверхні гусениць.
— зміщення центра ваги трактора відносно середини опорної поверхні гусениць.
Для тракторів з балансирною підвіскою опорних котків граничні статичні кути розраховують за формулами (6.2) після заміни в них Lг на Lk
Якщо на трактор, що знаходиться на схилі, начеплена машина, то при
Під статичною стійкістю розуміють стійкість нерухомої машини. Розрізняють поздовжню і поперечну статичну стійкість машини по перекиданню і сповзанню. Показниками стійкості є відповідні граничні статичні кути, які визначають з умов рівноваги машин, що знаходиться у критичному стані за стійкістю.
На рис. 6.1 показані колісний і гусеничний трактори, що знаходяться на поздовжніх схилах у критичному стані за стійкістю проти перекидання.
Критичні ситуації для колісного трактора характеризуються умовами: на підйомі Уп=0, на спуску Ук=0. У цих ситуаціях лінії дії ваги G проходять через точки перекидання (відповідно О2 і О1).
Умови рівноваги для таких ситуацій виражаються так:
на підйомі:
hцт G sin = aG cos
на спуску:
hцm G sin = (L — a)G cos
Ліві частини цих рівностей — моменти, що перекидають, праві — моменти, що перешкоджають перекиданню.
Граничні статичні кути поздовжньої стійкості колісної машини протії перекидання на підйомі () і на спуску () визначають за формулами:
tg =  ; tg =
; tg =  , (6.1)
, (6.1)
де а і  — координати центра ваги (див. рис. 6.1); L — поздовжня база машини.
— координати центра ваги (див. рис. 6.1); L — поздовжня база машини.
Критична ситуація гусеничної машини за стійкістю проти перекидання на поздовжніх схилах характеризується таким положенням центра тиску: у тракторів з пів жорсткою підвіскою опорних котків — на краях опорної поверхні; у тракторів із балансирною підвіскою котків — зміщеним від середини опорної поверхні на половину відстані Lк між цапфами крайніх балансирів.
прийнятих для кожної осі, значення ψ зведеного коефіцієнта опорів дороги. Вершини відкладених відрізків з’єднуємо пунктирною прямою, як показано на рис.4.2. Через точки перетину даної прямої зрядом вертикалей, що відповідають різним значенням коефіцієнта навантаження автомобіля, проводяться горизонтальні лінії до перетину з кривими динамічного фактора. Номери кривих вказують, на яких передачах зможе працювати автомобіль з різними навантаженнями. Максимальні швидкості руху визначаються як проекції на нижню вісь абсцис точок перетину горизонтальних ліній з кривими динамічного фактора.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1808; Нарушение авторских прав?; Мы поможем в написании вашей работы!