КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Математическое моделирование электрических линейных регуляторов
Современные регуляторы, как правило, выполняются в виде отдельных частей, а именно датчика, регулирующего блока, исполнительного устройства и т.д. Основную функцию по формированию закона регулирования выполняют регулирующий блок. Однако часто для этого дополнительно используют исполнительный механизм, блок дифференцирования и др.
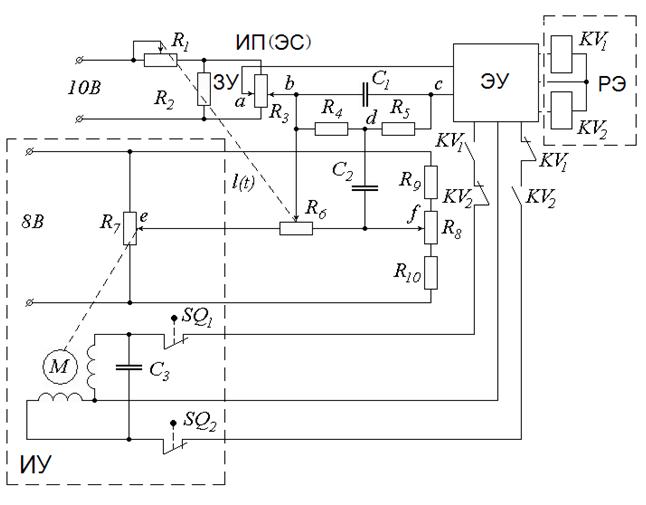
Рассмотрим электрическое регулирующее устройство (РУ4-16А), предназначенное для управления технологическими процессами (рис. 1).
Оно работает в комплекте с измерительными приборами со встроенными реостатными задатчиками, исполнительными механизмами с реохордом обратной связи, пультом управления, обеспечивающим ручное и оперативное управление. В него входит электронный усилитель (ЭУ), выходные реле КV1 и КV2, образующих релейный элемент (РЭ), элемента суммирования (ЭС) и устройства отрицательной обратной связи (УОС). Заданное значение регулируемой величины устанавливается перемещением движка реостата R3.
Обозначим передаточные функции: ЭУ – WЭУ(s), РЭ – WРЭ(s), УОС – WОС(s), исполнительного устройства (ИУ) – WИУ(s).
Тогда структурная схема такого устройства будет выглядеть следующим образом:
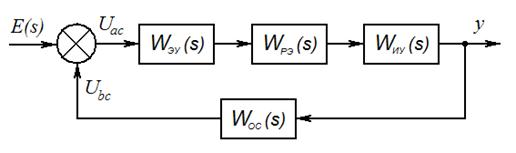
Исходя из структурной схемы регулятора находим передаточную функцию закона управления в общем виде:
 (1)
(1)
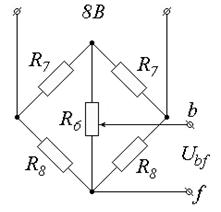
ЭУ в динамическом отношении является безинерционным усилительным звеном, а поэтому WЭУ(s) = kЭУ. Т.к. реле срабатывает практически мгновенно, то оно не имеет инерционного запаздывания и будет представлено также усилительным звеном WРЭ(s) = kРЭ. В структуре ИУ присутствует двигатель, электромеханическая постоянная которого мала и поэтому с допущениями можно считать, что WИУ(s) = 1/(TИУs). Обратная связь регулятора образована тремя элементами: реостатом R7; электрическим мостом в плечах которого расположены сопротивления R7 и R8, а в его диагонали переменный резистор R6; электрической схемой состоящей из сопротивлений R1 и R5 и емкостей С1 и С2. Таким образом, ее структурная схема состоит из трех последовательно соединенных динамических звеньев, а следовательно WОС(s) = W1(s) + W2(s) + W3(s). Входной величиной первого звена является угол поворота α(s), а выходного вала ИУ, а выходной величиной движка e реостата обратной связи R7. Т.к. вал ИУ кинематически жестко связан с реохордом, то звено является усилительным, т.е. W1(s) = k1. Входной величиной второго звена является перемещение движка реохорда R7, которое образует два плеча электрического моста в ОС, а выходной величиной напряжение в его диагонали Ubf, снимаемое с сопротивления R6. Электрический мост в динамическом отношении является усилительным звеном и его передаточная функция W2(s) = k2.
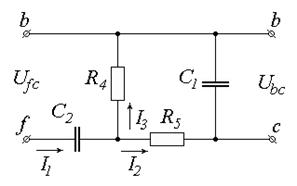
Входной величиной третьего звена является напряжение снимаемое с электрического моста, а выходной напряжение Ubс, которое является выходным параметром ОС. Для данной электрической цепи можно записать систему уравнений:
 (2)
(2)
Решая систему относительно входной и выходной величин, получим:
 . (3)
. (3)
Откуда передаточная функция:
 . (4)
. (4)
Тогда передаточная функция ОС примет вид:
 , (5)
, (5)
где kОС = k1 ∙ k2 – коэффициент передачи обратной связи, который можно задавать изменением сопротивления R6.
Подставляя выражения отдельных звеньев структурной схемы регулятора получим:
 , (6)
, (6)
где  – коэффициент усиления регулятора;
– коэффициент усиления регулятора;
 – время изодрома;
– время изодрома;
 – время предварения;
– время предварения;
 – передаточная функция балластного звена;
– передаточная функция балластного звена;

– постоянные времени балластного звена.
Таким образом получаем реальный ПИД-закон регулирования с некоторой погрешностью, вызванной передаточной функцией балластного звена (инерционного второго порядка). Для уменьшения его влияния необходимо уменьшать TИУ и увеличивать kОС, kЭУ, kРЭ.
Алгоритм управления.
Настроечными параметрами регулятора являются: k, Tиз и Tпр.
При отсоединении емкости С1 от цепи обратной связи (т.е. при С1=0), выражения для параметров регулятора приобретут следующий вид:
 ;
;
 ;
;
 ;
;


 .
.
И тогда регулятор реализует ПИ-закон управления с передаточной функцией
 .
.
Если закоротить емкость С2 (т.е. при С2→∞), то выражения для параметров регулятора приобретут следующий вид:
 ;
;
 ;
;
 ;
;
 |
.
И тогда регулятор реализует ПД-закон управления с передаточной функцией
 .
.
Если отсоединить емкость С1 и закоротить емкость С2 (т.е. при С1=0 и С2→∞), то выражения для параметров регулятора приобретут следующий вид:
 ;
;
;
;

.
И тогда регулятор реализует П-закон управления с передаточной функцией
 .
.
Если закоротить сопротивления R4 и R5 и отсоединить емкость С1 (т.е. при R4=R5=0 и С1=0), то полностью отключается ОС и WОС(s) = 0. Тогда передаточная функция примет вид:
 , где
, где  ;
;
Настроечные параметры можно изменять следующим образом:
k (настраивается с помощью kЭУ и kОС,);.
Tиз (настраивается с помощью R4);
Tпр (настраивается с помощью R5).
Однако, как видно из формул между параметрами настройки имеются тесные взаимосвязи, т.е. воздействуя на один из них, мы меняем и величины других, что является существенным недостатком регулятора.
|
|
Дата добавления: 2014-12-16; Просмотров: 466; Нарушение авторских прав?; Мы поможем в написании вашей работы!