КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механічні регулятори частоти обертання
|
|
|
|
Гідравлічні системи регулювання
Пневматичні системи регулювання
Електричні системи регулювання
Автоматизація теплових процесів на сучасних теплових електричних станціях здійснюється на базі автоматичних регуляторів, які складаються з:
· електронних регулюючих пристроїв;
· електричних сервоприводів.
Електронна регулююча апаратура використовується в різних схемах автоматичного регулювання технологічних процесах та теплових електричних станціях. Вона забезпечує збір і компенсацію електричних сигналів, які поступають від первинних приладів і перетворювачів сигналів до вимірюючого блок. Потім іде підсилення цих сигналів до величин, необхідних для управління пусковим пристроєм електричного виконуючого механізму в електричному блоці.
При цьому регулюючі прилади в поєднанні з виконавчим механізмом дозволяє здійснювати наступні закони регулювання:
· пропорційний – П;
· пропорційно-інтегральний – ПІ;
· пропорційно-інтегрально-дифференційний – ПІД, який формується тільки при подачі додаткового сигналу по швидкості зміни регулюючої величини на вході електронного блоку.
В пневматичних регуляторах в якості зовнішнього джерела енергії при передачі сигналів і переміщення регулюючого органу використовується стиснене повітря.
В автоматиці теплових процесів існує універсальна система елементів промислової пневмоавтоматики (УСЕППА) в основу якої покладений елементно-вузловий принцип побудови. Сутність його полягає в тому, що операції перетворення вхідних сигналів регуляторів (підсумовування, диференціювання або інтегрування та інші) здійснюються в окремих конструктивних вузлах, або модулях. Набір таких модулів і складає УСЕППА.
|
|
|
В гідравлічних автоматичних регуляторах в якості зовнішнього джерела енергії для передачі сигналів і переміщення регулюючого органу використовується тиск рідини (води або масла).
Гідравлічні системи регулювання, як і пневматичні, можуть діяти в режимі неперервного регулювання і не мають електричних ліній зв’язку і контактних пристроїв.
На ТЕС гідравлічні регулятори використовують для регулювання числа обертів і тиску пара парових турбін.
При роботі мобільних енергетичних засобів (МЕЗ) або машинно-тракторних агрегатів (МТА) навантаження на дизель постійно змінюється залежно від стану і властивостей дороги чи ґрунту, рельєфу місцевості тощо. Значні коливання частоти обертання колінчатого вала призводять до зниження продуктивності МТА чи МЕЗ.
Щоб зберегти заданий швидкісний режим роботи двигуна при змінному навантаженні, необхідно відповідно до навантаження змінювати положення рейки паливного насосу або дросельної заслінки карбюратора, збільшуючи чи зменшуючи подачу палива відповідно до рівня навантаження. Це забезпечується регулятором частоти обертання колінчатого вала двигуна. На автотракторних, комбайнових та інших двигунах використовуються всережимні регулятори.
Регулятори називають відцентровими, якщо для зміни положення рейки ПНВТ або дросельної заслінки карбюратора використовується відцентрова сила тягарців.
На рис. 19 показана кінематична схема механічного відцентрового регулятора частоти обертання паливного насосу високого тиску НД-22. Відцентрова (підтримуюча) сила РЦ регулятора через муфту діє на вильчастий важіль 4 і через систему важелів на дозатори 3 подачі палива до форсунок двигуна. Важелем управління 10 передається дія оператора через блок пружин на важіль коректора 14, від положення якого залежить відновлююча дія Е механічного регулятора і величина подачі палива. Гвинтом 13 регулюється номінальна величина подачі палива.
|
|
|
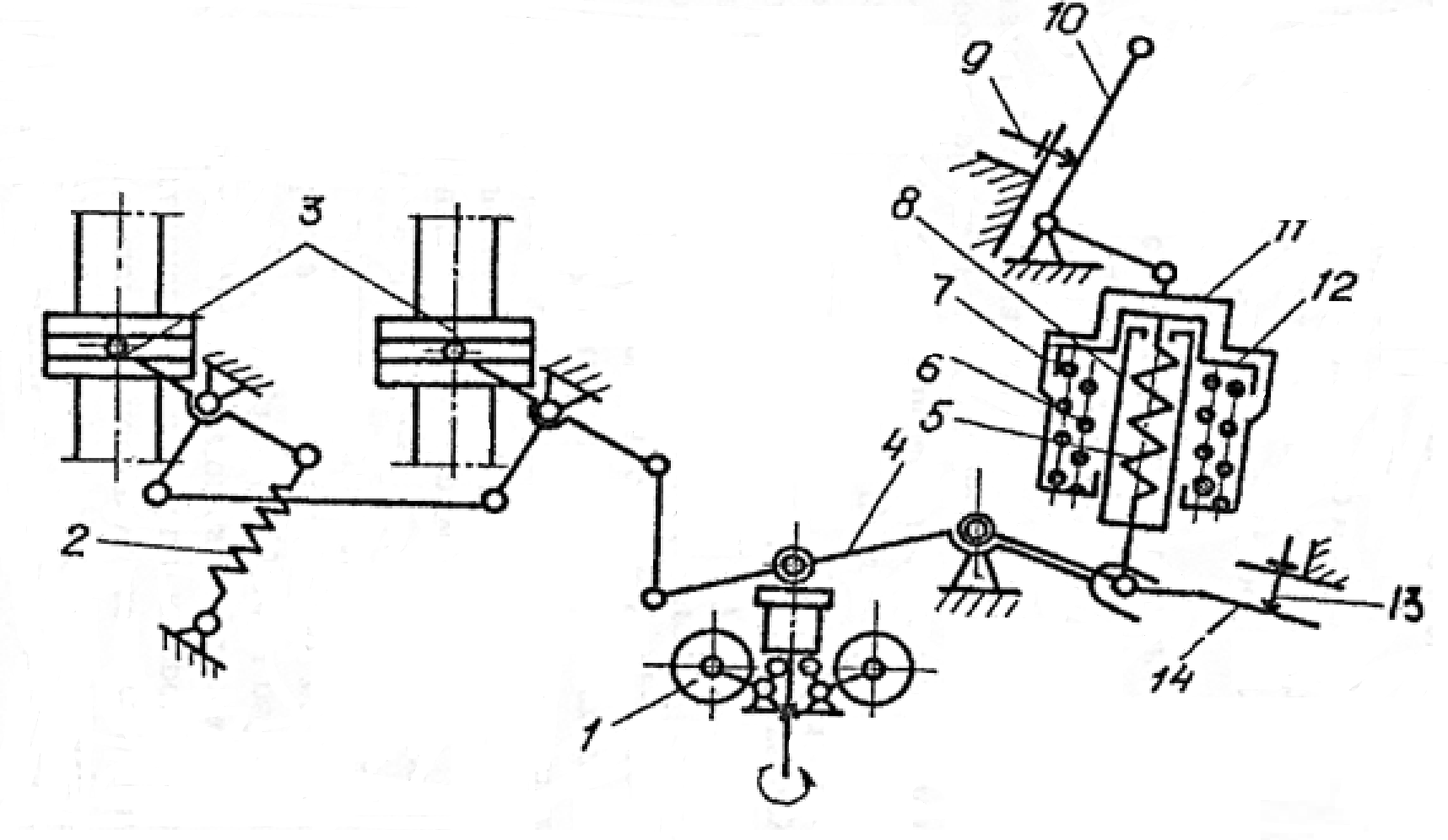
Рис. 19. Кінематична схема механічного відцентрового регулятора частоти обертання паливного насоса НД-22:
1 – відцентровий вимірювач швидкості с муфтою регулятора; 2 - пружина пускової подачі палива; 3 – дозатори подачі палива; 4 – вильчастий важіль; 5,6,7 – пружини регулятора; 8 – втулка; 9 – гвинт обмеження подачі палива; 10 – важіль управління; 11 – корпус блока пружин; 12 – стакан пружин; 13 – гвинт регулювання подачі палива; 14 – важіль коректора.
На рис. 20 показано експериментальні швидкісні характеристики паливного насоса НД-22 при всережимному і дворежимному регулюванні.
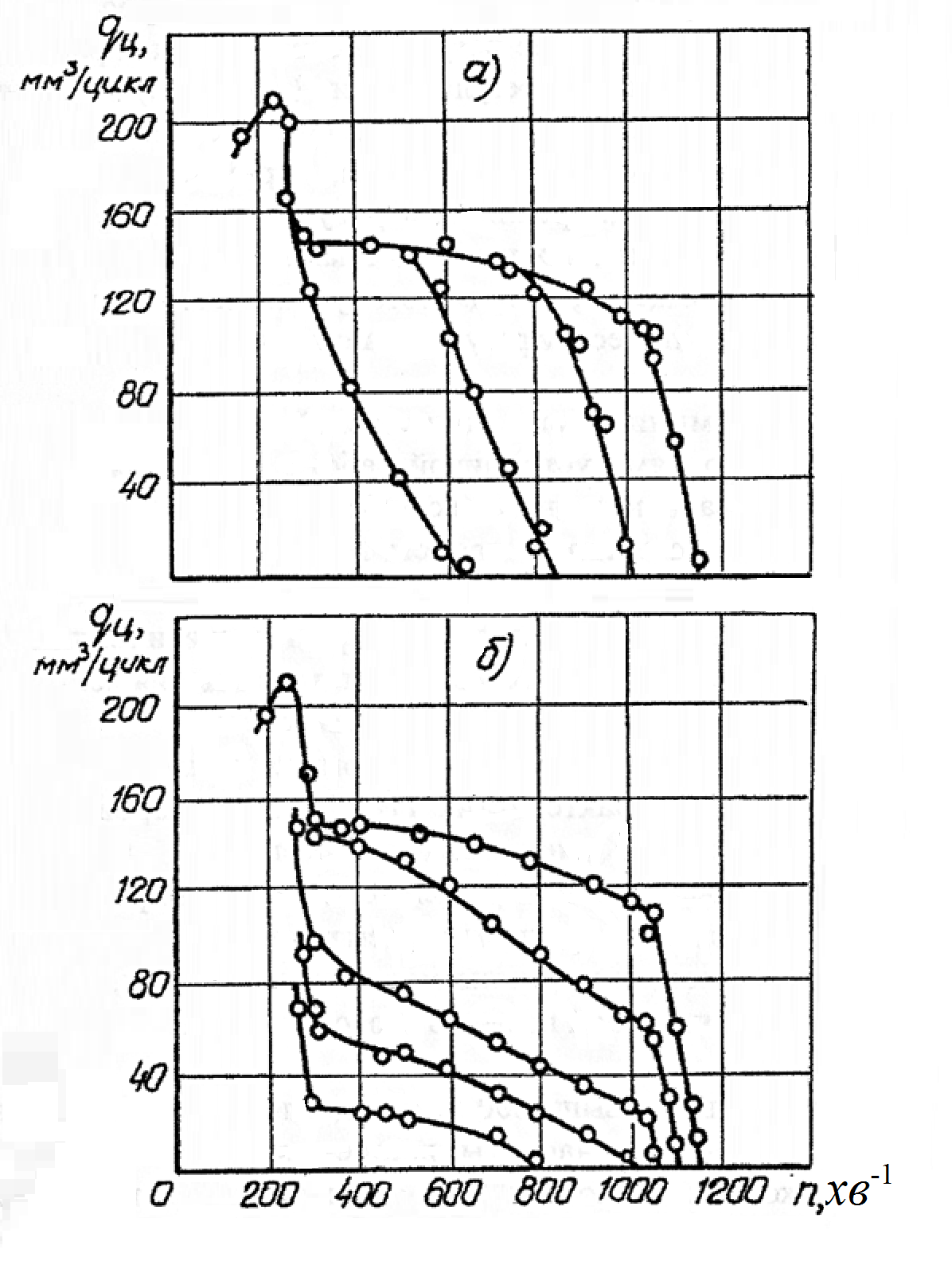
Рис.20. Швидкісні характеристики паливного насосу високого тиску НД-22:
а) – всережимне; б) – дворежимне регулювання.
Залежність qц=qц(nн,hн) визначається за дослідними характеристиками ПНВТ і апроксимуються таким поліномом:
 , (14)
, (14)
Рівняння динамічної рівноваги муфти чутливого елемента механічного регулятора описується в такому вигляді:
 , (15)
, (15)
де mp,vp – приведена до муфти регулятора маса і коефіцієнт в’язкого тертя регулятора;
PЦ - підтримуюча сила регулятора;
EП - відновлююча сила регулятора;
z - координата муфти регулятора;
nН - частота обертання вала насоса;
zЗД - задаюча дія регулятора.
Характеристика підтримуючої сили відцентрового регулятора визначається дослідним шляхом і апроксимується рівнянням:
 , (16)
, (16)
де ац1, ац2- постійні коефіцієнти апроксимації;
nН - частота обертання кулачкового вала паливного насоса.
На рис.21 показані дослідні характеристики підтримуючої сили автоматичного регулятора паливного насосу високого тиску (ПНВТ).
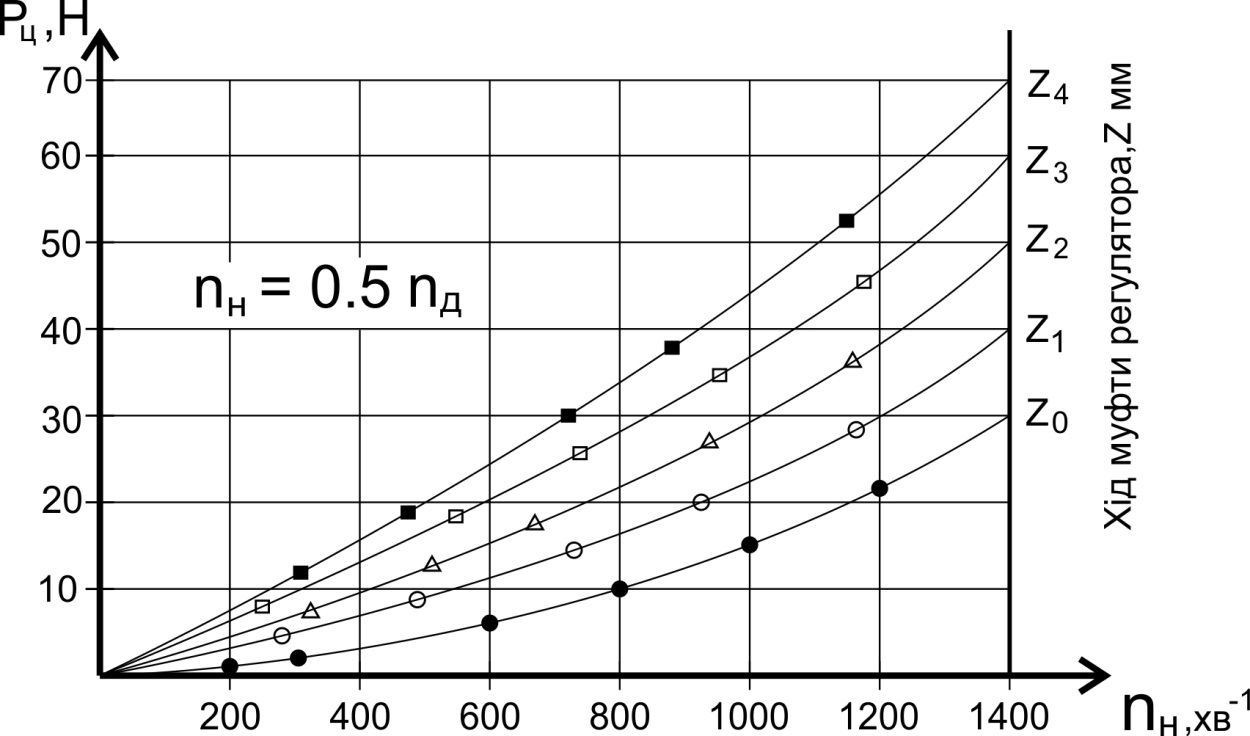
Рис.21 Експериментальні характеристики підтримуючої
сили регулятора ПНВТ.
Ці дослідні характеристики добре описуються аналітичною залежністю (16).
Для обчислення координати Z використовується рівняння балансу сил, які діють на муфту регулятора на сталому режимі роботи ПНВТ:
РЦ = Е + Т Р, (17)
де E - відновлююча сила регулятора, приведена до його муфти;
TP - сила сухого тертя в регуляторі, приведена до його муфти.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1967; Нарушение авторских прав?; Мы поможем в написании вашей работы!