КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Адаптивное управление по возмущению
|
|
|
|
Лекция 19
Адаптивное управление по возмущению отличается от других методов управления тем, что в нем учитываются все силы взаимодействия между различными сочленениями. Оптимальное управление базируется на линеаризованных уравнениях движения в окрестности номинальной траектории. Управляемая система характеризуется наличием прямой и обратной связей, которые могут быть рассчитаны отдельно и одновременно.
Прямая связь формирует номинальные моменты для компенсации всех сил взаимодействия между различными сочленениями при движении вдоль заданной траектории с помощью уравнений Ньютона-Эйлера, используемых в обратной задаче динамики манипулятора.
Обратная связь формирует моменты по возмущениям, которые уменьшают ошибки манипулятора по положению и по скорости до нуля вдоль заданной траектории.
При управлении линеаризованной возмущенной системой вдоль заданной траектории используется одношаговый оптимальный закон управления. Для получения необходимого управляющего воздействия параметры и коэффициенты передачи обратной связи пересчитываются и настраиваются в каждый дискретный период времени. Такой метод адаптивного управления позволяет свести задачу управления манипулятором от номинального управления к управлению линейной системой вдоль заданной траектории. В такой постановке задача управления формулируется как нахождение закона управления по обратной связи  , такого, что замкнутая система управления
, такого, что замкнутая система управления  асимптотически устойчива и описывает максимально приближенную к желаемой траекторию в широком диапазоне нагрузок в каждый момент времени.
асимптотически устойчива и описывает максимально приближенную к желаемой траекторию в широком диапазоне нагрузок в каждый момент времени.
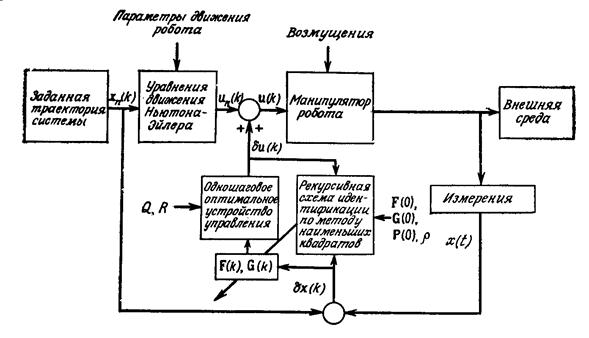
Рисунок 19.1. Адаптивное управление по возмущению
|
|
|
Рекурсивный алгоритм определения параметров по методу наименьших квадратов находится путем минимизации экспоненциального критерия ошибки, в котором учитывается квадрат ошибки последних измерений в виде:
 , (19-1)
, (19-1)
где вектор ошибки определяется выражением:
 , (19-2)
, (19-2)
а  - число измерений, используемых для оценки параметров
- число измерений, используемых для оценки параметров  .
.
Оптимальное управление, минимизирующее функционал ошибки, описывается выражением:
 , (19-3)
, (19-3)
где  и
и  - параметры системы, полученные с помощью алгоритма идентификации в k -й дискретный момент времени.
- параметры системы, полученные с помощью алгоритма идентификации в k -й дискретный момент времени.
Весовой коэффициент настраивается для каждого вектора i -го параметра  .
.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 564; Нарушение авторских прав?; Мы поможем в написании вашей работы!