КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алгебраическая сумма внешних сил и сил инерции, действующих на тело в любом направлении, равна нулю»
|
|
|
|
Рекуррентные уравнения динамики манипулятора
Лекция 13

[ Рекурретный (recurrens) – возвращающийся ]. Рекуррентные уравнения – уравнения приведения, сводящие вычисления n -го члена последовательности к вычислению нескольких предыдущих ее членов.
Основываясь на полученных выше кинематических соотношениях, воспользуемся принципом Д'Аламбера для вывода уравнений динамики движения манипулятора. Принцип Д'Аламбера позволяет применить известные условия статического равновесия к задачам динамики за счет рассмотрения (наряду с внешними действующими на механическую систему силами) сил инерции, препятствующих движению. Принцип Д'Аламбера выполняется для механической системы в любой момент времени. По сути это несколько модифицированный второй закон Ньютона, формулируемый следующим образом:
Рассмотрим i- е звено (рис. 8.1). Пусть точка О' совпадает с центром масс этого звена. Устанавливая соответствие между рис. 11.4 и 13.1, введем следующие обозначения (все векторы заданы в базовой системе координат):
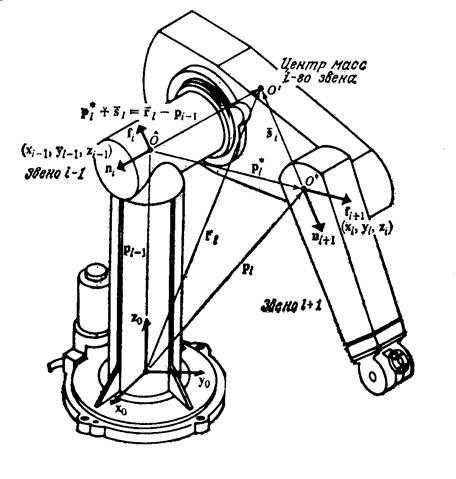
Рисунок 13.1. Силы и моменты, действующие на i-е звено
 - масса i- го звена;
- масса i- го звена;
 - положение центра масс i- го звена в базовой системе координат;
- положение центра масс i- го звена в базовой системе координат;
 - положение центра масс i- го звена относительно начала
- положение центра масс i- го звена относительно начала
системы координат  ;
;
 - положение начала i- й системы координат относительно
- положение начала i- й системы координат относительно
начала  -й системы координат;
-й системы координат;
 - линейная скорость центра масс i- го звена;
- линейная скорость центра масс i- го звена;
 - линейное ускорение центра масс i- го звена;
- линейное ускорение центра масс i- го звена;
 -суммарная внешняя сила, приложенная к центру масс
-суммарная внешняя сила, приложенная к центру масс
i- го звена;
 -суммарный момент внешних сил, приложенных к i- му
-суммарный момент внешних сил, приложенных к i- му
звену;
 - матрица инерции i- го звена относительно его центра
- матрица инерции i- го звена относительно его центра
масс в базовой системе координат  ;
;
 - сила, с которой -е звено действует на i- е звено в
- сила, с которой -е звено действует на i- е звено в
|
|
|
системе координат  ;
;
 - момент, вызванный действием -го звена на i- е
- момент, вызванный действием -го звена на i- е
звено в системе координат .
Пренебрегая силами трения в сочленениях, применив принцип Д'Аламбера к i- му звену, получаем:
 , (13-1)
, (13-1)
 . (13-2)
. (13-2)
Входящие в эти формулы линейные скорость и ускорение центра масс i- го звена в соответствии с равенствами (12-32) и (12-35) определяются выражениями:
 , (13-3)
, (13-3)
 . (13-4)
. (13-4)
Суммарная сила  и момент
и момент  , приложенные к i- му звену, обусловлены действием на него силы тяжести, а также сил со стороны соседних
, приложенные к i- му звену, обусловлены действием на него силы тяжести, а также сил со стороны соседних  -го и
-го и  -го звеньев. Таким образом:
-го звеньев. Таким образом:
 , (13-5)
, (13-5)
 (13-6)
(13-6)
Эти уравнения можно представить в рекуррентной форме, воспользовавшись тем, что:
 , (13-7)
, (13-7)
 . (13-8)
. (13-8)
Полученными уравнениями, имеющими рекуррентную форму, можно воспользоваться для вычисления сил и моментов 
 , действующих на звенья n -звенного манипулятора. Для этого достаточно учесть, что
, действующих на звенья n -звенного манипулятора. Для этого достаточно учесть, что  и
и  представляют собой соответственно силу и момент, с которыми объект манипулирования действует на схват манипулятора. Момент, создаваемый приводом i- го сочленения, должен быть равен сумме проекции момента
представляют собой соответственно силу и момент, с которыми объект манипулирования действует на схват манипулятора. Момент, создаваемый приводом i- го сочленения, должен быть равен сумме проекции момента  на ось
на ось  и момента вязкого трения в i- м сочленении (если сочленение – вращательное). Если же i- е сочленение – поступательное, оно реализует смещение на
и момента вязкого трения в i- м сочленении (если сочленение – вращательное). Если же i- е сочленение – поступательное, оно реализует смещение на  единиц длины относительно системы координат
единиц длины относительно системы координат  вдоль оси
вдоль оси  . В этом случае сила
. В этом случае сила  , создаваемая в этом сочленении, должна быть равна в системе координат сумме проекции силы
, создаваемая в этом сочленении, должна быть равна в системе координат сумме проекции силы  на ось и силы вязкого трения. Таким образом, момент (сила) , создаваемый приводом i- го сочленения, определяется формулой:
на ось и силы вязкого трения. Таким образом, момент (сила) , создаваемый приводом i- го сочленения, определяется формулой:
 , (13-9)
, (13-9)
где  - коэффициент вязкого трения в i -м сочленении.
- коэффициент вязкого трения в i -м сочленении.
Если основание манипулятора закреплено на платформе и 0-е звено неподвижно, то  ,
,  , и с учетом силы тяжести:
, и с учетом силы тяжести:
 , где
, где  . (13-10)
. (13-10)
Таким образом, для исследователя существует возможность выбора одной из трех следующих форм представления уравнений движения манипулятора:
1. удобная для анализа, но неэффективная в вычислительном плане форма Лагранжа-Эйлера;
|
|
|
2. эффективная с вычислительной точки зрения, но малопригодной для анализа форма Ньютона-Эйлера;
3. достаточно удобные для анализа при умеренных вычислительных затратах обобщенные уравнения Д'Аламбера.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 553; Нарушение авторских прав?; Мы поможем в написании вашей работы!